無人機航測技術在水利工程確權劃界中的應用
2020-04-16 03:37:12呂艷兵
山西水利
2020年10期
呂艷兵
(忻州市水利勘測設計院,山西 忻州 034000)
水利工程確權劃界,是依法對河道及水利工程劃定管理和保護范圍,是有效推進河長制工作的重要手段。傳統測量技術成本高、效率低,已無法滿足現代工程管理需要。無人機航測具有成本低,效率高等優勢。將無人機航測技術應用到水利工程勘測中,在保證勘測成果質量的同時,可提高勘測作業效率。
1 GPS D 級控制網測量
工程平面坐標系統采用CGCS 2000,中央子午線為111°,高斯投影為3°帶;高程采用1985 國家黃海高程;航測數字化地形圖成圖比例尺為1∶2000,等高距為2 m;測圖范圍包括運行區、工程區(從劃界范圍的周邊外延300 m)、庫區周邊(從校核水位外延300 m);數字線劃圖(DLG)為AUTOCAD 2004 的DWG 數據格式;數字正射影像圖(DOM)為TIF 數據格式(0.07 m分辨率)。
1.1 GPS 外業觀測
本次測量的D 級控制網,選取了14 點組成D 級網進行觀測,并按點名進行編號(FD 01—13),點間距為4~6 km。GPS 網使用三臺南方GPS 接收機(儀器標稱精度:靜態定位±5 mm+2 ppm),三臺華測GPS 接收機(儀器標稱精度:靜態定位±5 mm + 2ppm)進行觀測,采用三點推進邊連式構網法同步觀測,觀測時,有效衛星數應不少于4 顆,衛星高度角最小為15°,數據間隔為15 s,時段長度大于1 h,從天線的三面分別測量天線高三次,取平均值。
1.2 GPS 布網
實測GPS 控制點15 個,其中已知控制點2 個,未知點13 個,組成同步環66 個,異步環38 個。獨立基線20 條,其中必要基線14 條,多余基線36 條,平均重復設站數為1.6/站,符合《全球定位系統(GPS)測量規范》規定1.6/站[1],詳見表1。
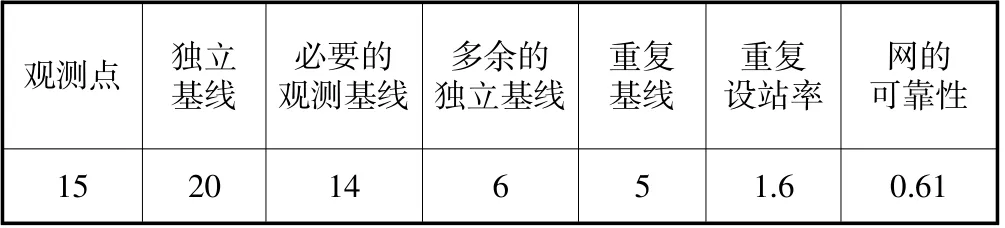
表1 GPS 觀測網的概述
1.3 GPS 基線處理和獨立基線選取
外業觀測后所有數據轉化為Rinex 數據,用計算機對外業數據進行檢查,檢查得中誤差小于40 mm,方差比大于3。……
登錄APP查看全文
猜你喜歡
中國生殖健康(2019年2期)2019-08-23 08:12:08
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車觀察(2016年3期)2016-02-28 13:16:26
中國質量與標準導報(2014年1期)2014-02-28 22:21:28
