基于STM32 的二自由度運動平臺設計
2020-04-15 03:23:18李林駿
機械管理開發 2020年11期
關鍵詞:系統
李林駿
(山西省財政廳信息網絡中心,山西 太原 030006)
引言
隨著工業技術的不斷發展,工業機器人被廣泛應用于汽車、航空制造、醫療等領域。其中少自由度的并聯機構由于其結構簡單、穩定性好、精度高等特點[1],在一些高精密領域應用廣泛。運動平臺是并聯機構的結構之一,多自由度和大承載力的運動平臺在大型、異形零件的裝配、調試等具有重要的作用[2-3]。本文設計一種用于重載的二自由度運動平臺,通過調節兩個方向的電機實現平臺的穩定性,可以應用于大型零件的裝配。
1 平臺模型
運動平臺分為靜平臺和動平臺,上下平臺采用虎克鉸鏈連接,通過改變支鏈桿的長度控制動平臺的擺動,本文為實現運動平臺在縱向、橫向兩個方向上的傾斜。其結構簡圖如圖1 所示,上平采用臺球頭副連接,下平采用臺圓柱副連接,支鏈中間采用移動副連接。在空間中,設n 為構件總數,設其中一個構件為參照物,其他構件相對參照物自由度為6,則共有6(n-1)個自由度,運動副數為g,各構件的自由度數為fi,則該機構的自由度F 計算公式為:
計算該結構的自由度,球頭副為3 自由度,圓柱副為2 自由度,移動副和旋轉副均為1 自由度,虎克鉸為2 自由度。
2 系統設計
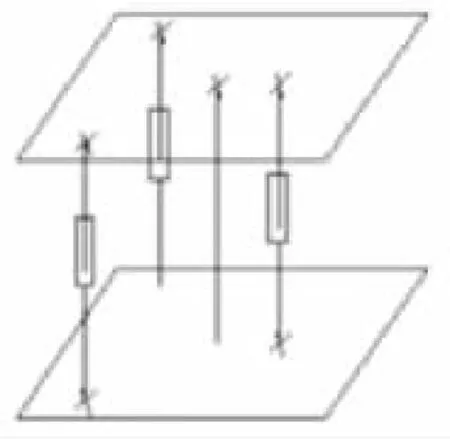
圖1 2 自由度運動平臺簡圖
實現兩個方向的運動,并保證平臺穩定性和快速響應,電控系統發揮了重要作用。系統應用STM32F103 系列芯片,用于控制伺服電機的運動。控制系統由STM32F103 構建最小系統[4],設計了電源轉換、通信轉換、LED 以及I/O 接口等電路。執行機構采用伺服電機驅動絲杠,以精確控制平臺的擺動角度。執行機構包括伺服電機、驅動器及機械裝置,角度傳感器采集伺服電機旋轉角度反饋給控制器;為提高系統抗干擾能力,配置了接觸器、噪聲濾波器以及隔離變壓器等。系統框圖如圖2 所示。
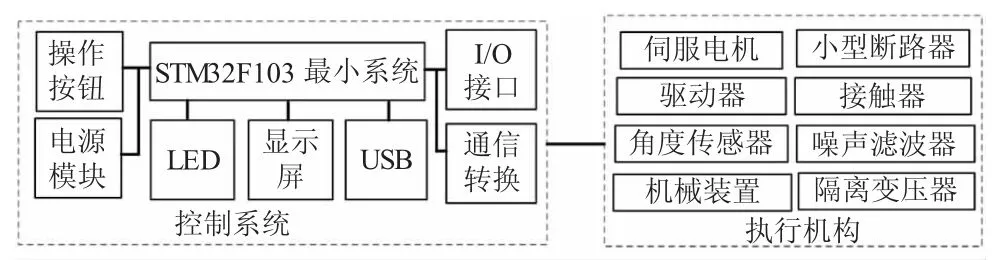
圖2 2 自由度運動平臺控制系統框圖
2.1 電源模塊
系統電源模塊分為兩部分,一部分給系統提供5 V 電源,一部分為5 V 轉3.3 V,分別如下頁圖3 和圖4 所示。J1 為電源接口,采用LM2596 芯片輸出5 V 穩壓電源,為系統提供較好的負載能力和濾波能力。AMS1117 芯片將5 V 轉換為3.3 V 為STM32 提供電源,內部集成過熱保護和限流電路,穩壓二極管保證系統較為穩定的3.3 V 輸出。
2.2 USB 轉TTL 電路
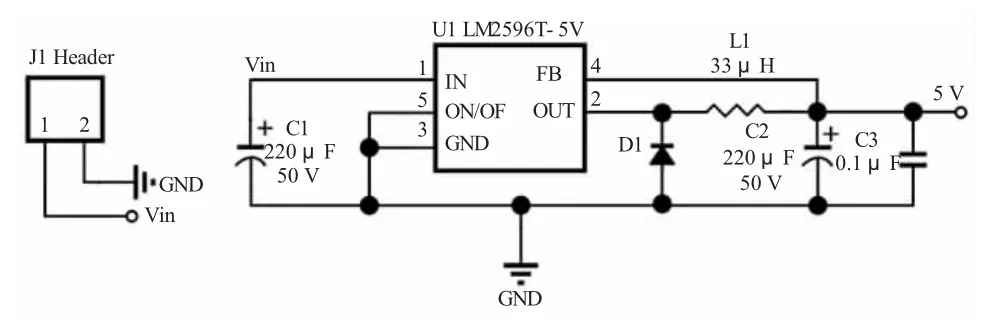
圖3 5 V 電源模塊電路
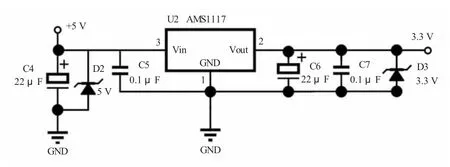
圖4 5 V 到3.3 V 轉換電路
系統采用串口進行通信,通過USB 模塊進行電壓轉換。J2 為USB 接口,D+、D-連接USB 總線,通過CH340G 芯片Txd、Rxd 管腳與STM32F103 芯片PA9、PA10 管腳進行數據交換。CH340G 芯片管腳DTR 輸出低電平時,Q2 三極管導通,BOOT 有信號輸出給STM32F103 芯片PB 管腳,進而請求串口通信;同理,CH340G 芯片管腳DTR 輸出高電平時,Q2三極管導通,RTS 輸出信號給STM32F103 芯片PB管腳,數據終端就緒。如圖5 所示。
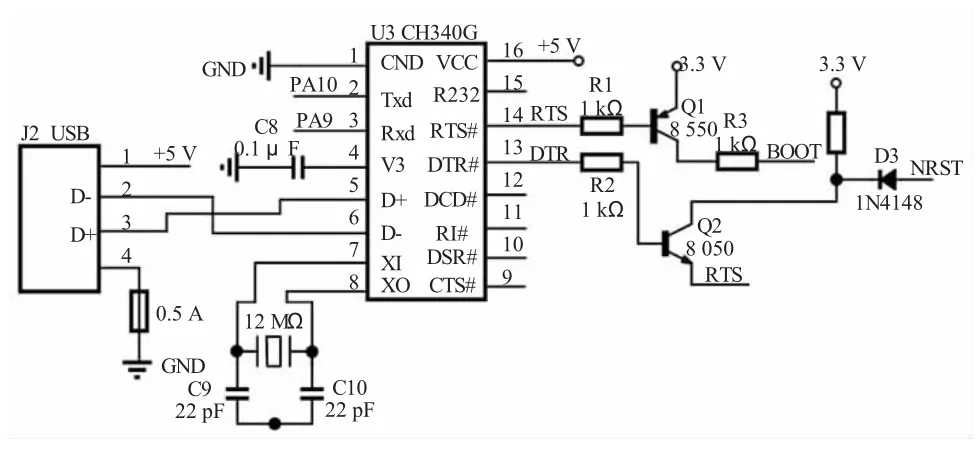
圖5 USB 轉TTL 電路
2.3 按鍵和LED 模塊
系統為方便用戶信息交互,設計了按鍵和LED電 路,如 圖 6 所 示。NRST、PA3-PA7 接 入STM32F103 相應芯片,并采用灌電流方式,以提高LED 的負載能力。
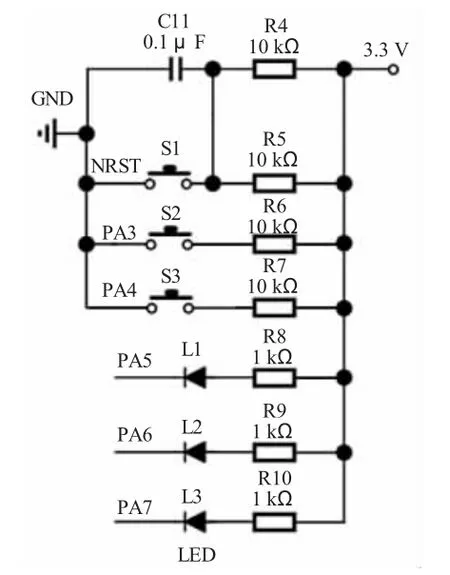
圖6 按鍵LED 電路
2.4 聲光提示電路
系統設計提示電路對一些信息發生聲光提示,其電路圖如7 所示。由三極管Q3 對蜂鳴器進行驅動,STM32F103 芯片PA8 管腳輸出低電平時,8550三極管導通,蜂鳴器導通工作[5]。
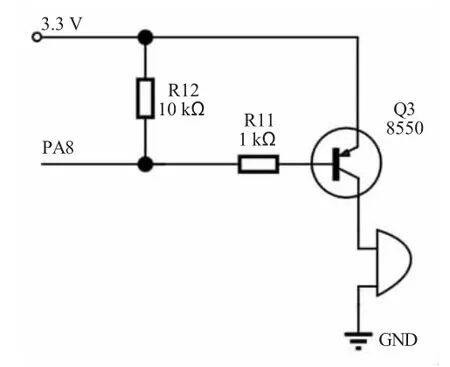
圖7 聲光提示電路
3 軟件設計
系統上電后對各個芯片初始化處理。通過按鍵啟動伺服電機,根據預定路線發出脈沖信號,平臺通過伺服電機調節滾珠絲杠結構達到指定的角度。采用中斷的方式查詢按鍵信號、串口數據信息,以降低系統功耗。采用查詢的方式對AD 寄存器數據并顯示,如XY 坐標等。若出現異常信號置位STM32 相關管腳在LCD 顯示并驅動蜂鳴器進行信息提示。
4 結論
1)基于嵌入式的二自由度的平臺運動平臺采用STM32F103 芯片為主要芯片,伺服電機為執行單元,設計了電源模塊、電平轉換模塊、按鍵及LED 模塊、聲光信息模塊等部分電路。
2)該系統具有結構緊湊、系統穩定等特點,可實現兩個方向的運行,承載大中型零件的加工、裝配及調試,對多軸運動系統設計研究具有一定的借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
