TRIZ理論在自動導引車性能提升中的應用
2020-04-13 02:20:10崔吉段向軍趙海峰
機械 2020年2期
關鍵詞:理論
崔吉,段向軍,趙海峰
TRIZ理論在自動導引車性能提升中的應用
崔吉,段向軍,趙海峰
(南京信息職業(yè)技術學院 智能制造學院,江蘇 南京 210023)
針對目前市場上差速式自動導引車機動性和穩(wěn)定性不足的問題,按照TIRZ理論解決問題的理論方法對其行走系統(tǒng)進行功能組件分析,找出問題的主要原因并確定矛盾矩陣。依據40個創(chuàng)新原理,確定了改善差速式自動導引車機動性的解決方案,為自動導引車性能提升羅列出創(chuàng)新性方案。在此基礎上,探討了TRIZ理論在產品設計中的應用可行性,為后續(xù)AGV其他功能參數改進具有一定的借鑒意義。
自動導引車;TRIZ理論;功能分析;創(chuàng)新設計
自動導引車[1](Automated Guided Vehicle,AGV)是工業(yè)自動化和物流智能倉儲的重要組成部分,是一種智能移動機器人。隨著“中國制造2025”和創(chuàng)新國家發(fā)展戰(zhàn)略的政策實施,傳統(tǒng)制造業(yè)在不斷尋求提升設備的自動化和智能化水平,“機器換人”時代已經來臨[2]。AGV在柔性智能制造、自動化物流倉儲中發(fā)揮重要作用,這勢必加大對AGV產品的需求量和性能提升要求,其中穩(wěn)定性、機動性、靈活性、高效性、節(jié)能性是AGV產品性能提升的主要參數。目前已廣泛用于煙草、物流等行業(yè)的AGV無法直接用于車間通道狹窄、路面環(huán)境差的傳統(tǒng)制造業(yè)中,因此改善現(xiàn)有AGV機動性、靈活性和承載力是將傳統(tǒng)AGV產品向制造行業(yè)推廣時亟需解決的技術問題。為快速解決向制造企業(yè)提供“量身定制”的AGV產品設計過程中的技術問題,可借助創(chuàng)新設計方法來實現(xiàn)。
TRIZ理論[3-4]是近年來國內外推行的創(chuàng)新設計理論,已在多種產品領域進行了應用研究,如黃兆飛等[5]利用TRIZ理論中的功能分析、資源分析等方法確定矛盾矩陣,并基于發(fā)明原理解決了往復式線切割設備的貯絲筒設計問題;尹健康等[6]利用TRIZ理論中的發(fā)明原理解決了卷煙分揀作業(yè)中噴碼效果差影響物流配送問題;熊愛奎[7]利用TRIZ理論中的功能模型和三軸分析,借助物場分析和發(fā)明原理解決了重型壓機快速節(jié)能問題;田鵬等[8]將TRIZ理論應用于板坯鑄造工藝改進中,采用資源分析確定技術沖突和矛盾矩陣,通過發(fā)明原理改善了板坯角部裂紋控制、提高了連鑄質量。
本文針對傳統(tǒng)差速式AGV產品的機動性和穩(wěn)定性差、轉彎半徑過大的問題,采用TRIZ理論方法對其行走系統(tǒng)進行分析,探討TRIZ理論在AGV產品創(chuàng)新設計中應用的可行性。
1 差速式AGV產品性能分析
清晰描述存在的初始問題,有助于確定其不足或缺點以及問題存在的條件或情況。AGV主要分為機械系統(tǒng)、電氣系統(tǒng)、定位導航系統(tǒng)、動力系統(tǒng)、輔助裝置等部分,靈活性和穩(wěn)定性與機械系統(tǒng)中的行走機構有直接關系,但其他部分對其也有一定影響。差速式AGV行走機構一般有三輪、四輪或六輪等形式,其中兩個驅動輪、其余為從動輪。目前市場上常用AGV產品如圖1所示,采用中間兩輪獨立驅動、前后兩對從向輪的六輪結構形式。當兩驅動電機輸出轉速不同時,從動輪跟隨驅動輪運動方向改變,即實現(xiàn)差速轉向,轉速差值取決于彎道半徑的大小。在轉向過程中,驅動電機要經歷減速-勻速-加速的速度波動過程,因而不但造成AGV無法在狹窄空間內通行,進而限制其靈活性和適應性,還影響整車穩(wěn)定性和運輸工作效率。如果采用磁條導航方式,轉彎過程中還需不斷調整兩驅動輪與磁條之間的距離,加劇了AGV在轉彎過程中的振動進而影響穩(wěn)定性。
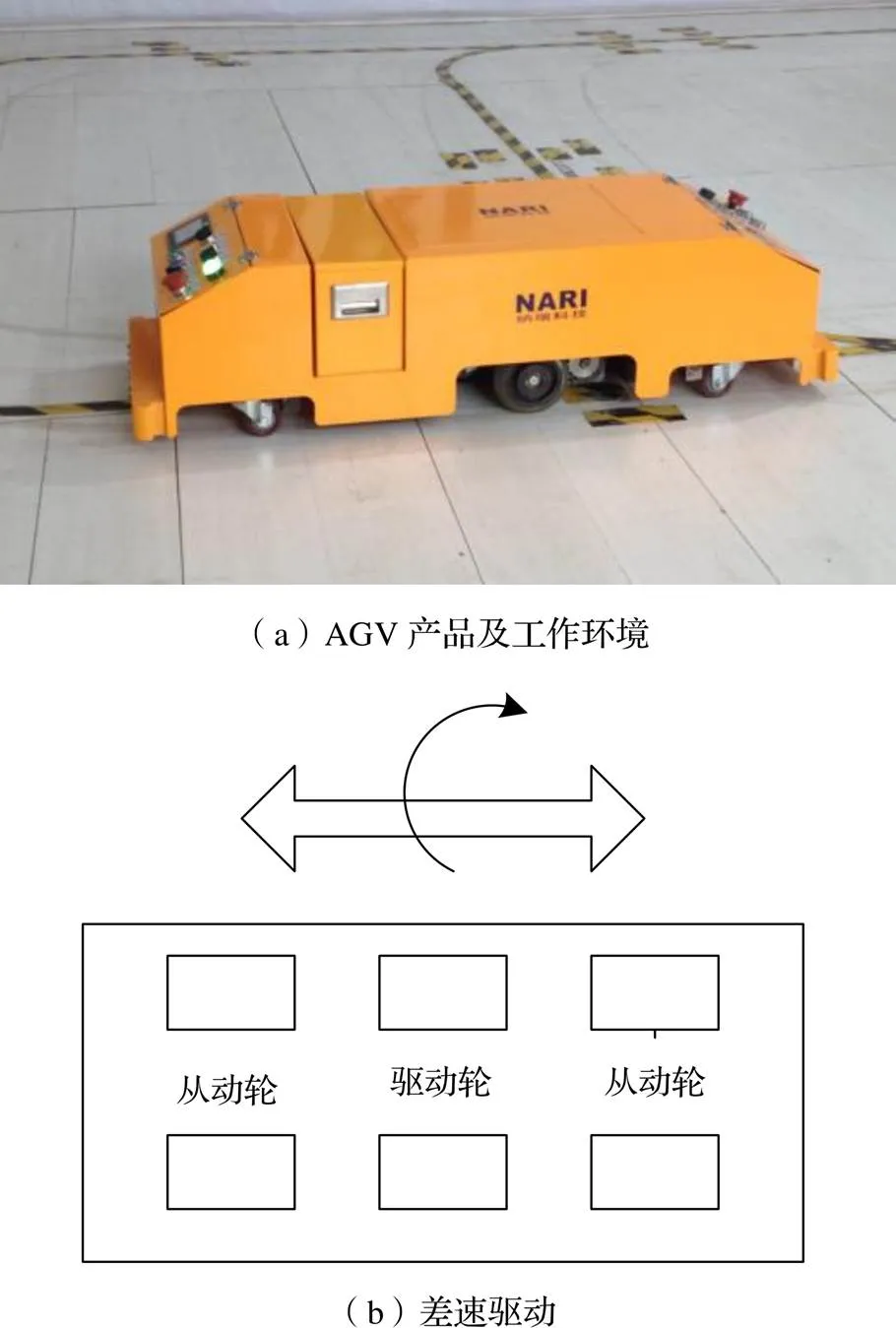
圖1 常用AGV產品及驅動圖
本文針對傳統(tǒng)差速式AGV轉彎過程中需要一定彎道空間、且增加轉運時間從而降低運輸效率、同時產生額外機械振動的技術問題,采用TRIZ理論來尋求問題解決方法,為AGV性能提升確定可行性方案。
2 應用TRIZ理論解決差速式AGV技術問題
根據AGV轉向問題描述分析可知,在轉彎過程中,由于向心力存在,AGV驅動電機速度需改變,從動輪跟隨驅動輪運動,為進一步確定技術問題的原因或條件,接下來按照TRIZ解題步驟來尋求該技術問題的解決方案。
2.1 AGV行走機構功能分析
AGV行走系統(tǒng)組件主要有電機、傳動件、驅動輪、從動輪、連接件、底盤,另外地面、導航系統(tǒng)、工作車間為超系統(tǒng),功能組件如圖2所示。AGV行走系統(tǒng)存在以下問題:電機對驅動輪的驅動不足,只能驅動輪子轉動,不能直接改變輪子轉向;傳動件與驅動輪相連,對驅動輪起支撐作用力不足;驅動輪對從動輪的驅動作用不足,驅動輪與從動輪的組合方式決定AGV行進方式;連接件對輪子、傳動件和驅動電機起固定支撐作用,作用不足;底盤對連接件起固定作用,作用過剩;導航系統(tǒng)對驅動輪起約束作用,作用過剩;地面對輪子起支撐作用,作用過剩;工作車間對輪子起限制作用,作用過剩。由上述系統(tǒng)組件模型及組件間的相互作用,可以得出主要問題在從動輪方向控制不足和驅動輪運動性能不足。
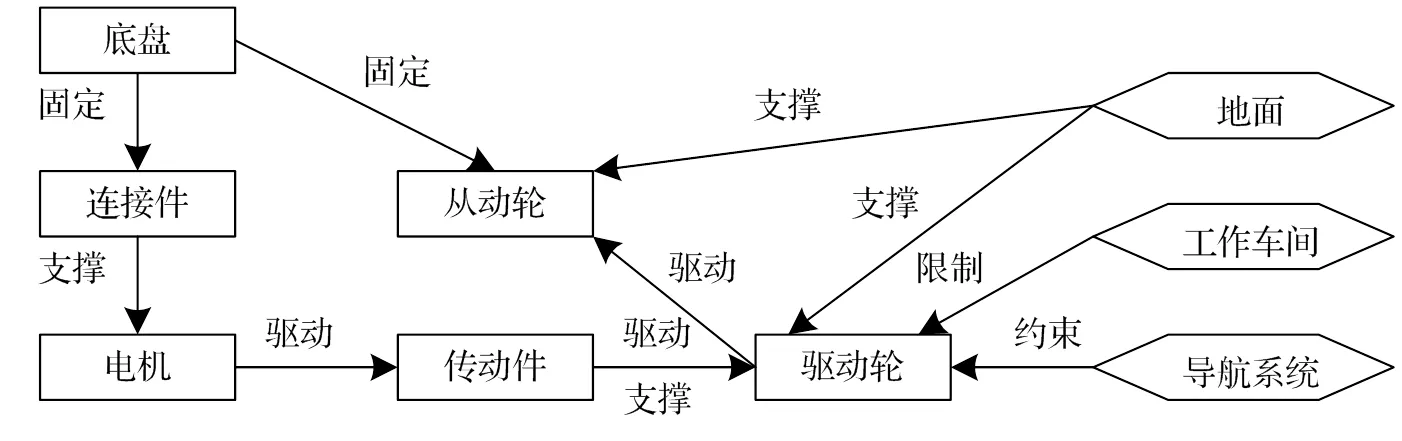
圖2 AGV行走系統(tǒng)功能組件圖
2.2 AGV提升靈活性方案
根據AGV行走機構系統(tǒng)分析得知,改善的技術參數為適應性和通用性(35),惡化的技術參數為系統(tǒng)的復雜性(36),查找矛盾矩陣,獲取得到TRIZ理論40個創(chuàng)新原理中的動態(tài)特性原理(15)、氣壓和液壓結構原理(29)、熱膨脹原理(37)、機械系統(tǒng)代替原理(28)。剔除不合適原則,優(yōu)選動態(tài)特性原理(15)和機械系統(tǒng)代替原理(28)解決。具體方案如下:
(1)調整環(huán)境或物體性能,使其各階段達到最優(yōu)狀態(tài)。得出方案1:企業(yè)在進行廠區(qū)車間規(guī)劃時,有條件的可考慮將設備直線排布,盡可能讓AGV保持直線運行,減少轉彎情況;或是將車間進行分割為若干小區(qū)域,縮短原料轉載運輸的路徑。
(2)分割物體,使其各部分可以改變相對位置。得出方案2:將AGV整車車架與行走機構分割開,兩者可以相互獨立運動,當AGV小車直線行進時,行走機構和車架一起運動,當AGV小車需要轉彎時,車架借助輔助支撐機構保持不動,依靠行走機構原地旋轉改變行進方向,形如行星輪系中太陽輪與行星輪轉動方式。又得方案3:從AGV行走機構的主動輪考慮,將驅動輪子系統(tǒng)中的輪胎分割成若干部分,輪子既能橫向運動、又能縱向運動,通過查詢知識庫得知,麥克納姆輪、切向輪等全向輪[9],其輪胎分割為若干個小輥子,將全向輪按一定方式排布組成行走機構,可實現(xiàn)AGV平面內任意方向運動。
(3)如果一個物體整體是靜止的,使之移動或可動。得出方案4,由圖2可知,電機、傳動件和驅動輪運動相關聯(lián),電機、傳動件和驅動輪的轉軸位置靜止,可將這幾部分組合成“雙舵式”驅動模塊[10],實現(xiàn)輪子既可以行進、又可以轉動,從而實現(xiàn)AGV車架方向不變前提下實現(xiàn)平面內任意方向行進,如圖3所示。
(4)采用具有可調自然頻率的扭振緩沖器阻抑軸的多頻振動。從提高平穩(wěn)性為著眼點,可以得出方案5:將AGV行走機構中的連接件與底盤的連接由原來的剛性連接變?yōu)閺椈傻娜嵝赃B接,減少輪子在進行過程中由于與地面接觸點高度不同引起的機械振動,類似于高檔汽車的可調節(jié)底盤懸掛系統(tǒng)。
(5)利用視覺/光學系統(tǒng)、聽覺/聲學系統(tǒng)、味覺系統(tǒng)、電磁系統(tǒng)或嗅覺系統(tǒng)代替機械系統(tǒng)。可得方案6:采用激光導航或機器視覺導航,突破了導航磁條對AGV運動區(qū)域的限制,方便更改AGV的路徑。

圖3 方案4中“雙舵式”驅動模塊圖
3 方案實施
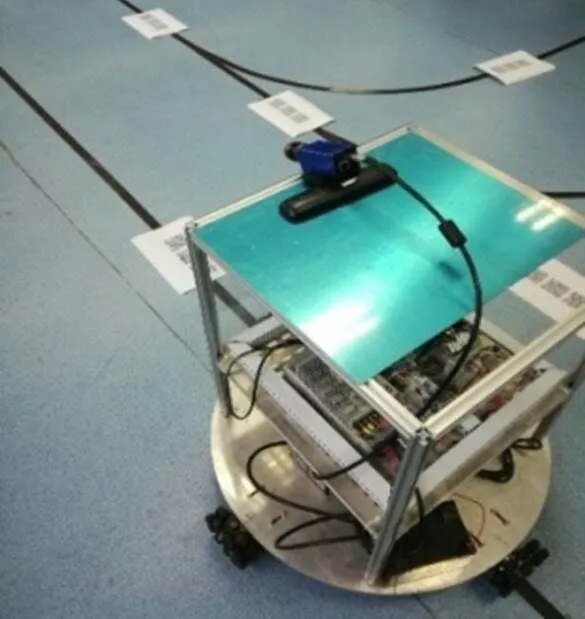
本文選取方案3、5、6,設計了一款基于磁條和視覺導航相結合全方位移動平臺,如圖4所示。該平臺行走機構采用四驅的全向輪形式,結構簡單,通過改變每個全向輪的轉速,可實現(xiàn)AGV小車原地旋轉、橫向、縱向等平面內任意方向運動,極大提高了AGV的機動性和靈活性,克服了狹窄空間的限制。該平臺行走機構將驅動電機、連接件和全向輪借助組合原理設計成一個獨立單元模塊,與底盤之間有剛性彈簧,實現(xiàn)輪子與地面的有效接觸,避免出現(xiàn)輪子懸空現(xiàn)象,進而降低地面不平對AGV運動性能的影響,該模塊安裝和維護都較為方便,降低了加工制造難度。
針對磁條導航方式在AGV轉向過程中的會引起額外的機械振動的問題,考慮到目前磁條導航方式的優(yōu)勢,并結合目前激光、視覺、慣性等導航方式特點,本文提出一種以磁條導航為主、視覺導航為輔的組合式導航方式。在直線運動時,采用磁條導航方式;當檢測到需要轉向的信號時,關閉磁條導航方式、啟動視覺系統(tǒng),采集二維碼路標信息(圖5),完成AGV的導航定位和轉向;待轉彎過程結束后,再次啟動磁條導航、關閉視覺導航方式,來校正視覺導航的偏差,并引導AGV循跡運行。該方式增加了導航和控制系統(tǒng)的復雜性,但將磁條導航和視覺導航的優(yōu)勢相結合提高了AGV運行的穩(wěn)定性,還進一步改善了AGV對路徑更改的適應性。
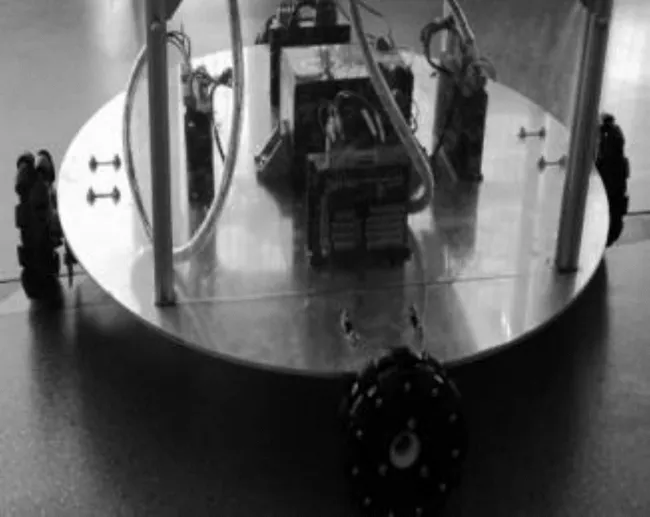
圖4 一種模塊化行走機構的全方位移動平臺
AGV在實際應用中,轉彎是路徑規(guī)劃最重要的問題,常見為直角彎和圓弧彎。直角彎運動規(guī)劃理論研究較多,方形底盤AGV的運動規(guī)劃較困難,因為不能將平臺抽象成質點,在轉彎過程中要考慮方形底盤與前面和兩側面的安全距離,驅動電機速度調節(jié)較復雜,勢必加劇AGV機械振動,影響穩(wěn)定性。本文設計的AGV圓形底盤結構在直角彎的優(yōu)勢明顯,可將AGV簡化為有一定半徑的質心,且可通過多種運動組合形式來通過直角彎,比如橫向、縱向和原地旋轉組合,圓弧軌跡,斜向和原地旋轉組合。通過表1數據分析可知,斜向運動的距離和所用時間最短,從安全距離分析,直線運動方式順利通過的轉彎半徑最小、運動控制最為簡單。
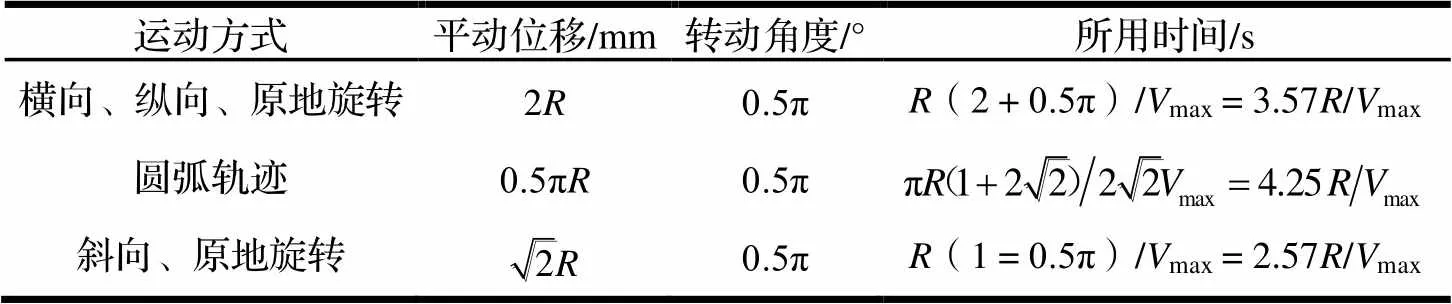
表1 不同方式直角彎道運動數據表
注:為圓形底盤的半徑,mm;max為AGV的最大速度,m/s。
4 總結
通過對目前AGV產品靈活性差問題的描述分析,通過TIRZ理論中的功能分析和因果分析,找出問題的主要原因,并用矛盾矩陣和發(fā)明原理從不同角度提出了多種用于提升AGV靈活性的解決方案。通過TRIZ理論在AGV行走機構改進的嘗試,驗證了其可行性,今后可以繼續(xù)利用TRIZ理論來解決AGV在定位導航精度、節(jié)能及重載等方面性能提升的技術問題。
[1]張燕超,崔吉. 全方位移動機器人動力學研究[J]. 機械,2019,46(3):18-21.
[2]張勇. 基于3C自動化加工中心的AGV小車車載控制系統(tǒng)的設計與研究[D]. 廣州:廣東工業(yè)大學,2018:1-4.
[3]陸群,顧新春. 點石成金——大學生創(chuàng)新激發(fā)及創(chuàng)新實踐指導[M]. 南京:南京大學出版社,2016:55-60.
[4]趙敏. TRIZ入門及實踐[M]. 北京:科學出版社,2009.
[5]黃兆飛,謝三山. 基于TRIZ的往復式線切割機床貯絲筒創(chuàng)新設計[J]. 機床與液壓,2018,46(7):97-101.
[6]尹健康,陳昌華,等. 基于TRIZ理論的卷煙分揀作業(yè)中噴碼系統(tǒng)創(chuàng)新設計[J]. 包裝工程,2018,39(9):108-114.
[7]熊愛奎. 基于TRIZ理論解決大型壓機快速和節(jié)能的問題[J]. 機械設計,2018,35(1):377-381.
[8]田鵬,劉偉,等. 基于TRIZ理論的板坯角部裂紋控制[J]. 連鑄,2017,42(4):53-60.
[9]朱建江,邢雯麗. 應用ADAMS與ANSYS實現(xiàn)Mecanum輪參數設計優(yōu)選[J]. 機械設計與研究,2017,33(1):186-189.
[10]陳光超. 基于AVR的差速驅動導引小車運動控制[D]. 合肥:合肥工業(yè)大學,2016.
Application of TRIZ Theory in the AGV Performance Improvement
CUI Ji,DUAN Xiangjun,ZHAO Haifeng
( School of Intelligent Manufacturing, Nanjing College of Information Technology, Nanjing 210023, China )
Aimed to the current problem that the maneuverability and stability of the automatic guided car are not enough, the TRIZ is applied to find where conflicts exist through system components’ functional and causal analysis. The solution of the problem that AGV maneuverability and stability are presented according to 40 inventive principles, and a number of programs for product performance improvement are listed out. In the process of the problem solving, the feasibility of the TRIZ theory in product design is discussed, which will provide reference for the improvement of other functional parameters of AGV.
automatic guided vehicle;TRIZ theory;function analysis;innovative design
TH122
A
10.3969/j.issn.1006-0316.2020.02.003
1006-0316 (2020) 02-0014-05
2019-04-09
南信院院級自然科研基金項目青年重點項目(YK20160201);南信院工程研發(fā)中心開發(fā)基金項目(KF20170201);2018年江蘇高校“青藍工程”優(yōu)秀教學團隊培養(yǎng)對象——工業(yè)機器人技術專業(yè)教學團隊(2018-4);江蘇省高校自然科學研究面上項目(18KJB530012)
崔吉(1982-),男,山東泰安人,碩士,副教授、TRIZ國家二級咨詢師,主要研究方向為工業(yè)機器人、機電一體化。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
讀與寫·教育教學版(2017年10期)2017-11-10 22:28:57
大電機技術(2017年3期)2017-06-05 09:36:02
廣州大學學報(社會科學版)(2016年1期)2016-06-24 09:46:02
區(qū)域經濟評論(2016年2期)2016-05-17 05:06:43
學習月刊(2015年21期)2015-07-11 01:51:44
社會生活探索(2013年0期)2013-10-24 03:44:40
