基于超寬帶技術(shù)的掘進(jìn)機(jī)自主定位定向方法研究
2020-04-12 15:13:22段笑蔚
機(jī)械管理開發(fā) 2020年12期
段笑蔚
(山西科林礦山檢測技術(shù)有限責(zé)任公司,山西 陽泉045000)
引言
隨著近年來煤炭開采深度不斷加大,人工作業(yè)的危險性不斷提高,為了減少人員傷亡,同時為了實現(xiàn)深部煤層無人化開采,進(jìn)一步提高煤炭能源生產(chǎn)能力,國內(nèi)外專家學(xué)者一直致力于無人采掘裝備的研究,煤礦開展生產(chǎn)最主要的設(shè)備就是掘進(jìn)機(jī),掘進(jìn)機(jī)的自主巡航作業(yè)功能是實現(xiàn)綜掘面無人化的前提,它主要通過自主定位定向系統(tǒng)檢測掘進(jìn)機(jī)機(jī)身坐標(biāo)和位姿參數(shù),進(jìn)而判斷掘進(jìn)機(jī)是否進(jìn)入預(yù)定掘進(jìn)航線進(jìn)行作業(yè)。超寬帶技術(shù)是一種新型無線電技術(shù),將這項技術(shù)應(yīng)用于掘進(jìn)機(jī)自主定位定向系統(tǒng)中能夠?qū)崿F(xiàn)高精度測距,為綜掘工作無人化奠定了基礎(chǔ)。
1 基于超寬技術(shù)的自主定位系統(tǒng)原理
1.1 超寬帶技術(shù)
超寬帶技術(shù)的出現(xiàn)使無線技術(shù)進(jìn)入了新的發(fā)展階段,超寬帶(UWB)在提出時是指信號占用帶寬很寬。UWB是1989年在美國提出來的,并在2002年被進(jìn)行了商用定義,信號帶寬直接影響自身的距離分辨力,這種寬帶特性使UWB無線定位系統(tǒng)與窄帶無線定位系統(tǒng)相比在距離分辨精度方面具有很大的優(yōu)勢。UWB系統(tǒng)的測量精度非常高,其測距定位精度可以達(dá)到毫米級。此外,UWB定位系統(tǒng)發(fā)射的信號占空比低,多徑信號比常規(guī)窄帶信號更容易分離。由于UWB定位系統(tǒng)采用擴(kuò)頻信號,所以系統(tǒng)的頻帶較寬,在信道容量保持不變時,高帶寬能夠減小信噪比,由此可見,UWB定位系統(tǒng)具備抗干擾特性,非常適合應(yīng)用在掘進(jìn)機(jī)自主定位定向系統(tǒng)中。目前,現(xiàn)有的UWB定位系統(tǒng)在國內(nèi)還不是很常見,在英國和美國應(yīng)用比較廣泛[1]。
1.2 TW-TOF測距法
無線定位系統(tǒng)是通過建立數(shù)學(xué)模型來計算對象的位置坐標(biāo)的,進(jìn)而實現(xiàn)定位功能,數(shù)學(xué)模型主要是根據(jù)與位置有關(guān)的距離變量來建立的,理論上可將UWB的定位方法分為三種,一種是根據(jù)接收信號強(qiáng)度進(jìn)行定位的,一種是根據(jù)信號到達(dá)角度進(jìn)行定位的,還有一種是根據(jù)接收信號的時間長短來進(jìn)行定位的。UWB信號對時間有較高的分辨率,根據(jù)這一特點,可以設(shè)計出運用TW-TOF測距方法的掘進(jìn)機(jī)自主定位方案。一般情況下,對于兩個具有相同時鐘源的無線電收發(fā)器來說,采用TW-TOF測距法能夠得到兩者之間的真實距離,還可以獲得測量信號的傳播時間,同時對信號到達(dá)時間進(jìn)行記錄。通過運用TW-TOF測距法能夠?qū)崿F(xiàn)這一功能。
2 UWB 自主定位定向系統(tǒng)的設(shè)計
2.1 機(jī)身坐標(biāo)定位
自主定位系統(tǒng)的設(shè)計主要包括對機(jī)身坐標(biāo)定位、機(jī)身位姿測量和基站自主標(biāo)定三個部分,掘進(jìn)機(jī)機(jī)身坐標(biāo)定位方案如圖1所示,自主定位系統(tǒng)應(yīng)具有至少3個UWB天線的基站,用于向周圍空間發(fā)射信號,機(jī)身定位點在接收到信號后會做出相應(yīng)的響應(yīng)。這時,利用TW-TOF測距法能夠獲得定位點與基站之間的距離。掘進(jìn)機(jī)在巷道中作業(yè)時,其基站群的坐標(biāo)是可以獲得的,通過基站群的坐標(biāo)可以計算出定位點的坐標(biāo)。然后與預(yù)設(shè)掘進(jìn)路線進(jìn)行對比,能夠判斷出掘進(jìn)機(jī)的位置與預(yù)設(shè)軌跡是否相同。如果偏離軌跡也可以得到偏差值[2]。
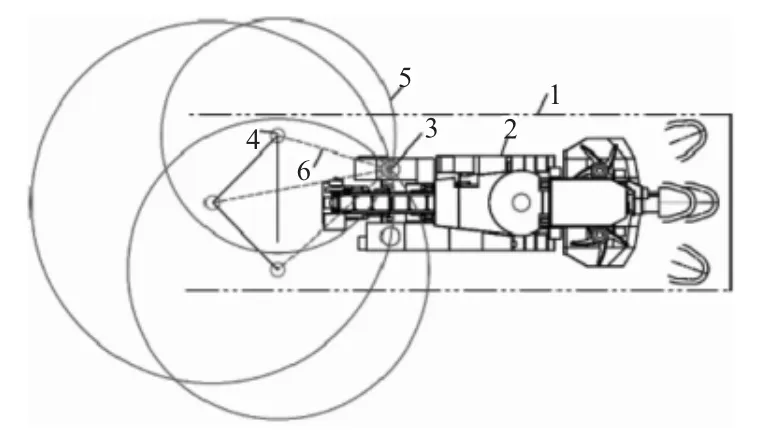
圖1 坐標(biāo)定位方案
2.2 機(jī)身位姿測量
掘進(jìn)機(jī)機(jī)身位姿的測量主要是獲得機(jī)身的3個姿態(tài)角,根據(jù)角度的測量能夠得到機(jī)身的實時位姿,姿態(tài)角主要包括航向角、俯仰角和橫滾角。掘進(jìn)機(jī)在工作過程中應(yīng)具有自動控制功能,其截割的巷道斷面要滿足巷道成型標(biāo)準(zhǔn),即使在截割過程中不可避免地出現(xiàn)了誤差,但誤差也應(yīng)保持在合理范圍內(nèi),掘進(jìn)機(jī)的截割頭與機(jī)身具有一定的位置關(guān)系,通過對機(jī)身位姿的測量能夠得到掘進(jìn)機(jī)截割頭的位置,并判斷其是否滿足巷道成型標(biāo)準(zhǔn)。位姿測量方案如圖2所示,為了確保位姿測量的精準(zhǔn)性,掘進(jìn)機(jī)位姿檢測系統(tǒng)應(yīng)包括至少3個機(jī)身定位點。定位點的位置是不變的,基站的坐標(biāo)位置也是明確的,與機(jī)身坐標(biāo)定位原理相同,經(jīng)過計算,便能夠得到機(jī)身的實時位姿。
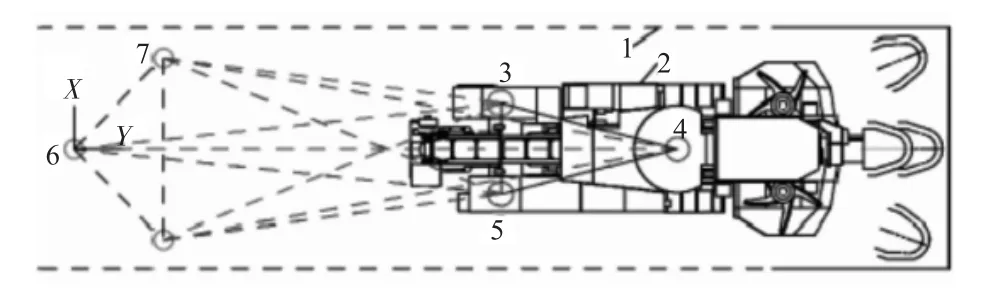
圖2 位姿測量方案
2.3 基站自主標(biāo)定
掘進(jìn)機(jī)基站的自主標(biāo)定是系統(tǒng)需要實現(xiàn)的又一重要功能。雖然我國不斷地進(jìn)行掘進(jìn)機(jī)無人技術(shù)的研究,但由于受作業(yè)環(huán)境和狀況的限制,目前使用的掘進(jìn)機(jī)還是半自主的,還是要人工作業(yè)的,與全自主的掘進(jìn)機(jī)還是存在很大差距的。在掘進(jìn)機(jī)工作過程中,其與基站的距離是不斷增加的,隨著距離的增大,掘進(jìn)機(jī)自主標(biāo)定的誤差也會變大,使得標(biāo)定位置準(zhǔn)確度大大降低,最后變得沒有參考價值,系統(tǒng)失效。基站需要利用人工進(jìn)行標(biāo)定,人工標(biāo)定速度慢并且危險性較高。基于此,為了增大掘進(jìn)機(jī)的測量距離,需要制定出跟隨性較強(qiáng)的自主標(biāo)定方案,以便于對掘進(jìn)機(jī)的位置參數(shù)進(jìn)行實時測量,這樣也會縮短人工作業(yè)時間,大大降低危險性。根據(jù)上述要求制定的基站標(biāo)定方案如圖3所示,該系統(tǒng)硬件應(yīng)包含至少三個定位點,同時多個基站群,本系統(tǒng)設(shè)置了四個,這四個基站群應(yīng)具有智能性,它們應(yīng)具備基本的移動測量和通訊等功能。當(dāng)掘進(jìn)機(jī)的有效距離達(dá)到極限時,系統(tǒng)內(nèi)的自主標(biāo)定基站群開始運行,它們會按照預(yù)設(shè)的軌跡向前移動,在基站群向前移動時,其它基站群會對其測距,從而更新坐標(biāo),消除誤差,由于是無人化掘進(jìn)作業(yè),所以基站群在移動時能夠自動進(jìn)行避障和規(guī)劃路線。
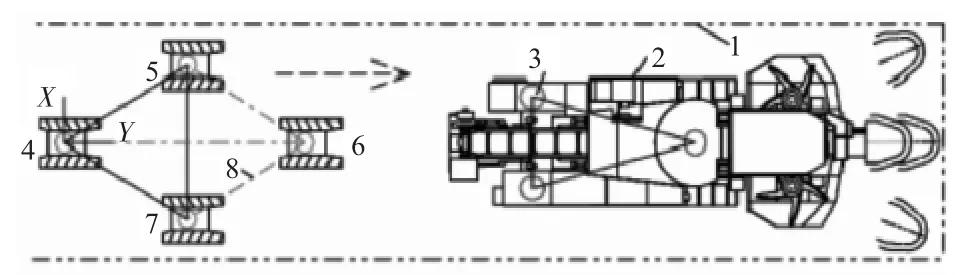
圖3 基站標(biāo)定方案
3 UWB自主定位定向系統(tǒng)精度分析
根據(jù)規(guī)定,實際巷道邊界與理論之間的誤差應(yīng)小于10 cm,這就要求定位系統(tǒng)應(yīng)具有較高的精度。通常情況下,系統(tǒng)的有效測量距離應(yīng)不小于50 m,太小的測量范圍在實際工作中應(yīng)用價值不大。目前,我國井下掘進(jìn)作業(yè)的定位系統(tǒng)的測量距離能達(dá)到百米。在巷道成型過程中,掘進(jìn)機(jī)的最終邊界誤差的大小會受多種因素的影響,只有機(jī)身定位精度足夠高,其它控制系統(tǒng)才能具有較高的精度。利用Matlab可以對系統(tǒng)的定位測量進(jìn)行仿真模擬,最終得到系統(tǒng)的定位誤差分布規(guī)律。該定位定向系統(tǒng)的參數(shù)不是直接測量得到的,它需要通過對基站測距參數(shù)進(jìn)行運算來得到。所以,系統(tǒng)誤差與測量范圍有關(guān),系統(tǒng)的測量范圍越大,運算得到的交匯解區(qū)域越大,誤差也越大。通過對系統(tǒng)進(jìn)行Matlab仿真可以看出系統(tǒng)的有效測量范圍已經(jīng)超過了400 m,與以往傳統(tǒng)的測量技術(shù)相比,該系統(tǒng)有效測量距離是以往的4倍,明顯提高了測量距離,為實現(xiàn)掘進(jìn)機(jī)無人化奠定了基礎(chǔ),同時也證明了超寬帶技術(shù)的優(yōu)越性[3]。
4 結(jié)論
從以上研究結(jié)果可以看出,基于超寬帶技術(shù)的掘進(jìn)機(jī)自主定位定向系統(tǒng)能夠有效提高測量距離,為實現(xiàn)掘進(jìn)機(jī)無人化作業(yè)提供了思路,基于超寬帶TW-TOF測距技術(shù)的定位定向法減少了人工作業(yè),工作效率也因此得到了提升,它是自主巡航作業(yè)中不可或缺的先進(jìn)技術(shù)。由于掘進(jìn)機(jī)工作環(huán)境比較復(fù)雜,在掘進(jìn)過程中容易偏掘?qū)е孪锏厘e位,不能滿足相關(guān)質(zhì)量標(biāo)準(zhǔn),基于超寬帶技術(shù)的自主定位系統(tǒng)有效解決了這一問題,與其他定位定向系統(tǒng)相比,它能夠?qū)崟r對掘進(jìn)機(jī)的位置狀態(tài)進(jìn)行監(jiān)測,對機(jī)身位姿進(jìn)行測量,進(jìn)行基站自主標(biāo)定,它是實現(xiàn)無人化綜掘的基礎(chǔ)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
