八輪AGV轉向及運動控制特性分析
2020-04-10 07:08:54
港口裝卸 2020年1期
上海振華重工(集團)股份有限公司
1 引言
AGV(Automated Guided Vehicle,自動引導小車)是集裝箱碼頭岸邊集裝箱起重機到堆場設備之間水平運輸的關鍵設備,具有自動化程度高、靈活性強、安全性好、效率高等特點[1-2]。
近年來,AGV的研究工作得到了廣泛的開展。Danwei等主要開展了四輪轉向車輛軌跡方面的研究,利用轉向系統的靈活性,將軌跡規劃分解為速度規劃及轉向規劃,同時考慮到車輛機械和驅動力矩等約束的限制[3]。任孝平等基于阿克曼原理對輪式移動機器人的運動學特性,建立了不考慮滑行、剎車等的輪式移動機器人的運動學模型,給出了描述機器人運動狀態的轉向角、航向角和轉彎半徑等物理量的數學公式[4]。T Le-Anh主要從車輛調度角度綜述了自動導引車輛系統的設計與控制[5]。
相比于物流行業傳統的雙輪差分驅動以及帶阿克曼連桿的四輪轉向車輛,本文所研究的八輪獨立轉向車輛除基本直行行駛、90°轉向及蟹行運動外,還支持橫行及原地轉向模式,其靈活的運動方式可作為目前集裝箱自動化碼頭自動引導車的一種擴展形式。八輪180°回轉電差速AGV的8個輪子被分成4組,每組2個輪子靠短驅動橋連接在一起,由電機獨立驅動,且最大可實現110°轉向運動。本文主要探討了車輛在各種運行模式下車輪轉向角度及輪速分配問題,在系統給定軌跡基礎上設計了前后控制點路徑跟蹤控制算法,闡述了前后軸控制點目標轉向角度及輪速計算方法,最后通過選取幾組常見運行工況,對所述方法進行了驗證。
2 轉向及運動學模型分析
AGV在不同速度、不同帶載情況下運行時,其動力學特性同樣很重要,但是考慮到轉向及行走等驅動裝置建模復雜,且建模精度有限,通常采用加大系統設計功率以及通過設置不同配載情況下使用不用的加減速度來減少動力學特性帶來的影響[6-7],本文只討論運動學模型問題。
為簡化車輛運動學分析,假設在車輛的中心線和車軸的交點上存在2個虛擬車輪,圖1為車輛在反對稱轉向模式下的示意圖,其中φfl和φfr分別為前軸左側和右側的轉向角,Φrl和φrr分別為后軸左側和右側的轉向角,O為車輛中心點,也即為車輛轉向中心與車輛中心線的交點[8-9]。車輛轉向運動學模型為:
(1)
式中,(x1,y1)為車頭側車軸虛擬中心位置;θ為AGV的朝向角(逆時針為正方向);B為車頭側和車尾側車軸虛擬中心之間的距離;φ1和φ2為前后虛擬車輪轉向角;v1為前軸虛擬車輪中心的速度。
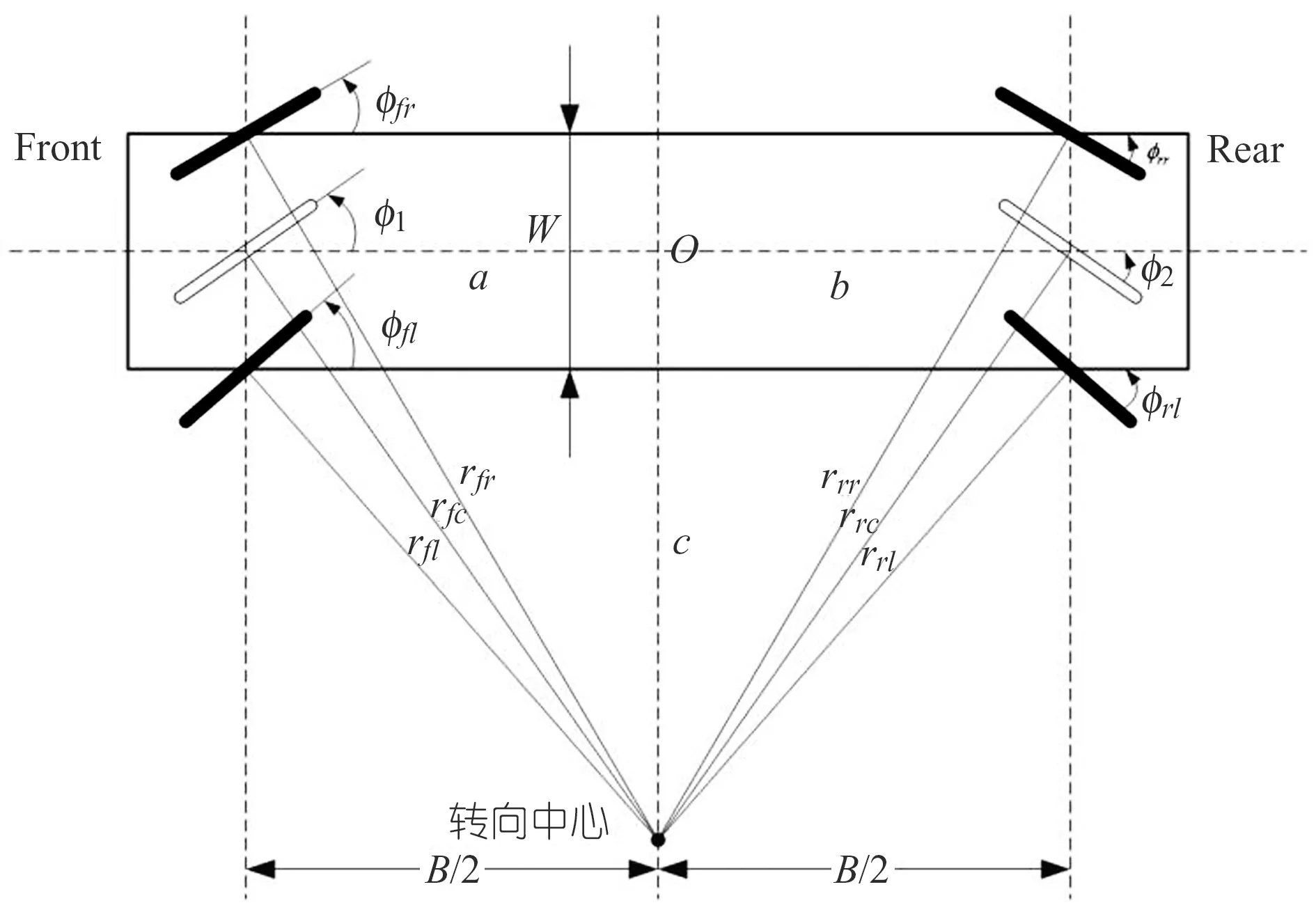
圖1 反對稱轉向
假設前后車軸的虛擬合成角度和合成速度已經由運動控制模塊計算得出,且分別為φ1、φ2、VF、VR,則四輪反對稱轉向模式下對應的4個輪子轉角及轉速分別如式(2)~(9)所示:
θfl_cmd=atan{Btanφ1/[B-0.5T(tanφ1-tanφ2)]}
(2)
θfr_cmd=atan{Btanφ1/[B+0.5T(tanφ1-tanφ2)]}
(3)
θrl_cmd=atan{Btanφ2/[B-0.5T(tanφ1-tanφ2)]}
(4)
θrr_cmd=atan{Btanφ2/[B+0.5T(tanφ1-tanφ2)]}
(5)
(6)
(7)
(8)
(9)

橫行及蟹行模式下,4個輪子轉向角度及輪子轉速指令分別為:
θfl_cmd=θfr_cmd=θrl_cmd=θrr_cmd
(10)
Vfl_cmd=Vfr_cmd=Vrl_cmd=Vrr_cmd
(11)
原地轉向模式下,4個輪子轉向角度及輪子轉速指令分別為:
θfl_cmd=-θfr_cmd=-θrl_cmd=θrr_cmd=atan(B/T)
(12)
Vfl_cmd=-Vfr_cmd=-Vrl_cmd=Vrr_cmd
(13)
各輪子轉向角度經伺服驅動器控制的伺服電機帶動轉向機構轉動,4組輪子獨立轉向。各輪子速度指令經過減速比和量綱轉換后送入行走電機驅動器中。
3 前后車軸路徑跟蹤控制
考慮到車輛導航系統采用天線—磁釘系統測量AGV的絕對位置信息,即在AGV底盤的前端和后端,對稱安裝1對檢測天線。為方便求取路徑跟蹤偏差信息,直角轉彎以及蟹行運動模式下軌跡規劃模塊輸出直接為前后天線目標路徑,通過計算獲得前后天線路徑偏差信息,并將其輸入運動控制單元,控制器輸出經過折算后即為前后車軸的合成角度和合成速度,經過轉向角度及轉速分配后即可獲得每個輪子轉向角度及轉速目標控制值。
運動控制的原理可以解釋為斜行和反對稱轉向的組合。AGV在跟蹤期望路徑時,主要有2種誤差:位置誤差δd,即AGV中心點與期望路徑垂直距離;航向角偏差δθ,即AGV方向角與期望路徑垂足處切線方向夾角之間的差值。糾正橫向路徑偏差需要通過調整轉向角進行修正,可采用斜行來補償位置偏差,采用反對稱轉向來補償航向角偏差,前后合成輪的修正量為:
δφ1=lim(δφ_min,Kcrabδd+Kturn1δθ
(14)
δφ2=lim(δφ_min,Kcrabδd-Kturn1δθ
(15)
式中,δφ_min為每次糾偏向右最大擺動值(負值);δφ_max為每次糾偏向左最大擺動值(正值);Kcrab、Kturn1,Kturn2分別為斜行及轉向控制增益。
為實現小車精確定位,車輪速度采用分段減速控制方法。主動輪車軸目標速度由車輛加減速度特性,到目標點距離,環境及任務最大允許速度以及爬行距離決定,整個過程速度規劃曲線見圖2。其中adec為車輛減速度,Δs為到目標點距離(原地轉向模式時也可作為到目標點的航向角偏差),kp為比例控制增益,Vslow為爬行速度。
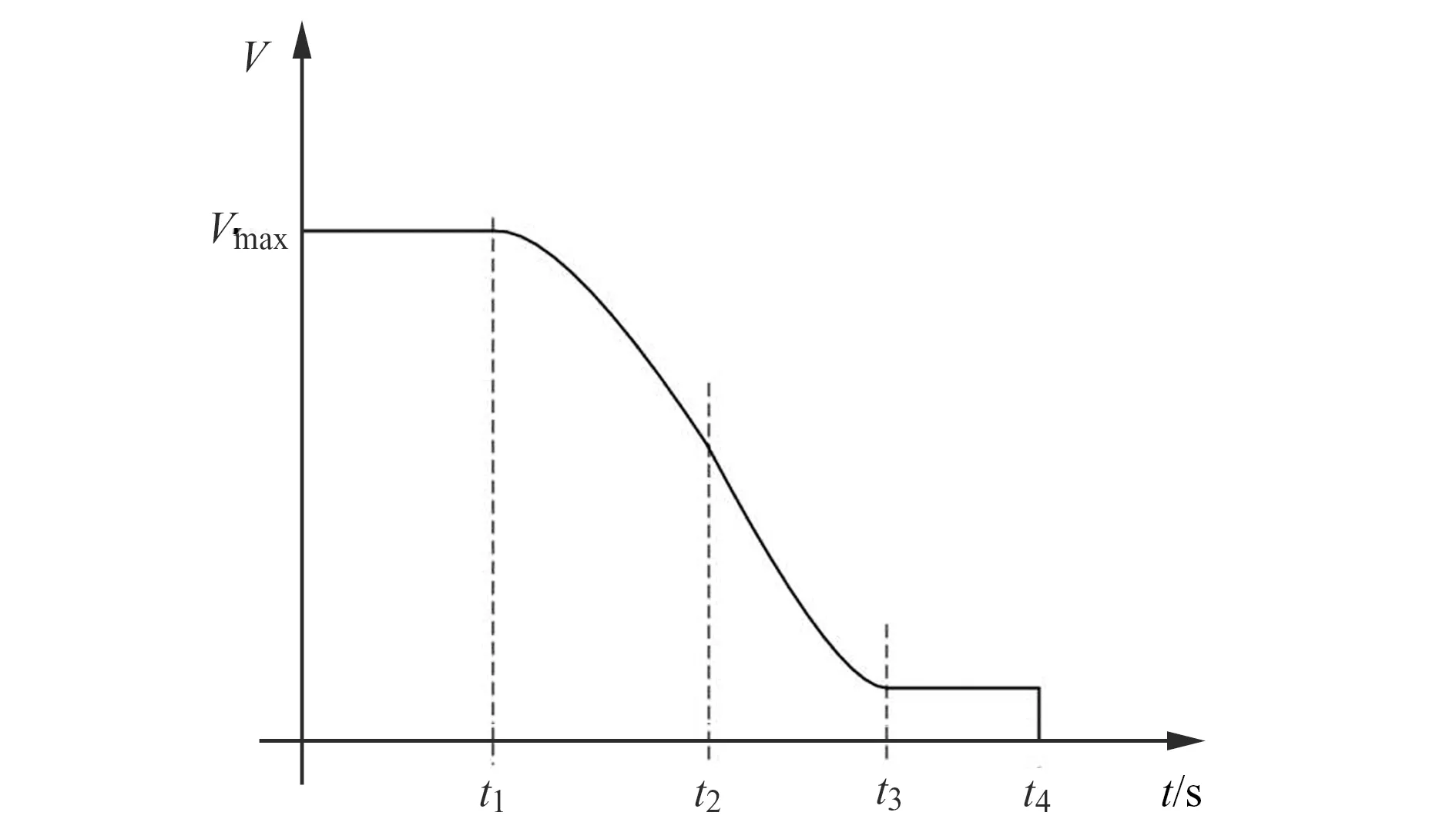
圖2 減速控制曲線
首先根據AGV當前位置與目標位置之間的距離,勻速保持時間及驅動器加減速特性計算出本次行車指令AGV可能達到的最大運行速度Vmax。當Δs≤V2max/2adec時,采用勻減速控制策略,之后切換至比例速度控制模式。待車輛運行至距離目標位置為爬行距離后,保持為爬行速度,進一步到達制動距離時,給出制動命令。
考慮到運動過程中前后軸速度匹配問題,從動輪車軸給定速度為:
VR=VFcosφf/cosφr
(16)
車輛控制器根據導航控制器給定的電機轉速參考值對前后電機進行協調控制,即通過監控電機的電流和電壓實時計算車頭車尾2臺電機的輸出功率。當兩者輸出功率之差大于一定閾值時,表明車尾輸出力不足,這時電控控制器就在車尾電機轉速給定參考值基礎上,逐漸增大車尾電機的轉速參考值,直到2臺電機的輸出功率之差小于閾值。
4 實驗結論
為了驗證所設計控制器有效性,選取幾組典型工況進行測試。
4.1 工況一:直角轉彎
AGV主要依靠90°直角轉彎來改變路徑行駛方向。給定條件為:最大轉彎運行速度2.0 m/s,轉彎半徑16 m,采樣周期10 ms。從圖3~圖8可以看出車橋給定速度及角度跟蹤效果良好,整個行車過程中前后天線橫向路徑偏差保持在較小范圍,停車時橫向偏差10 mm左右。
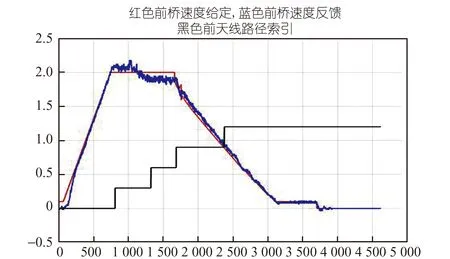
圖3 主動輪速度給定及反饋
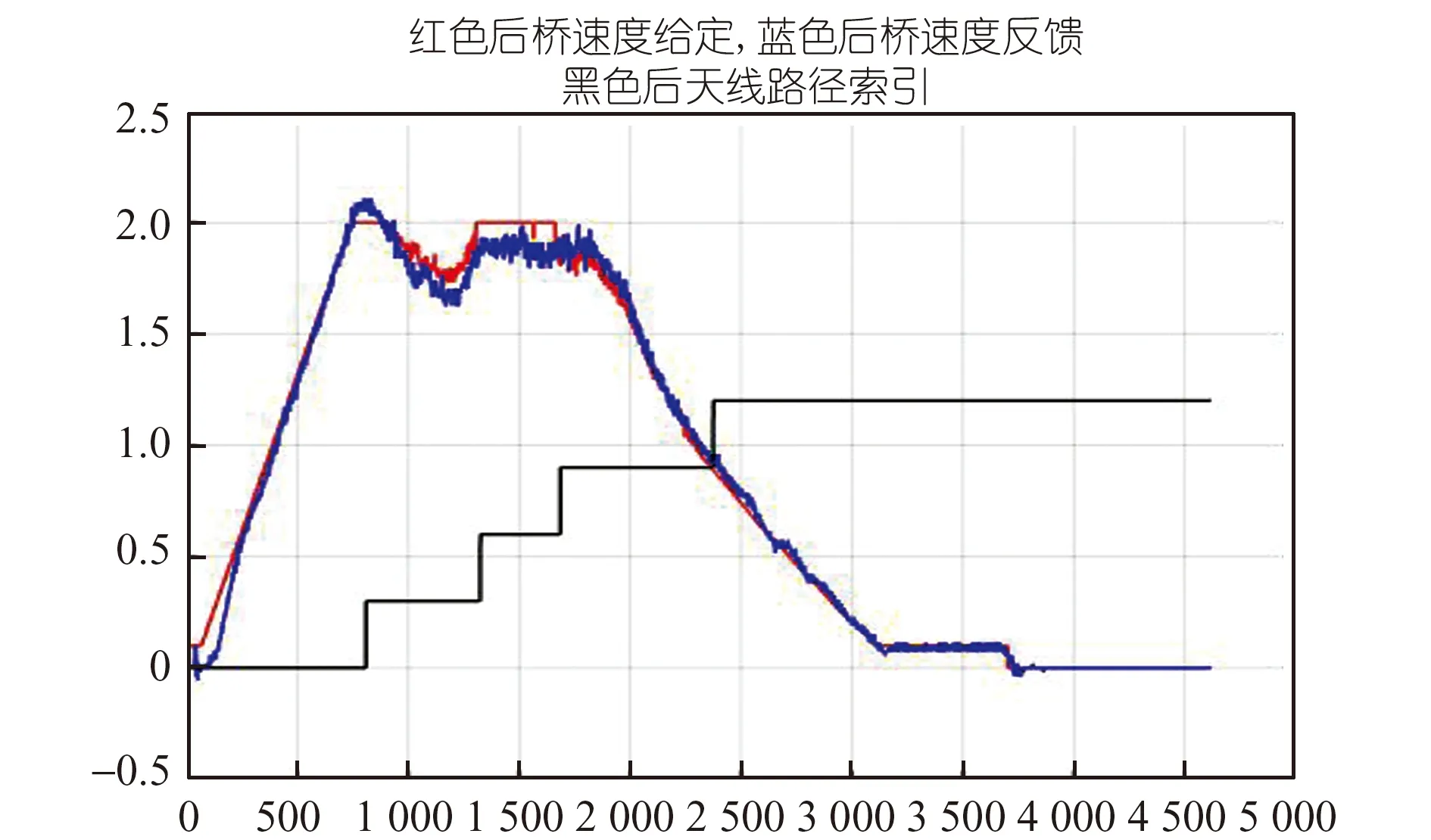
圖4 從動輪速度給定及反饋
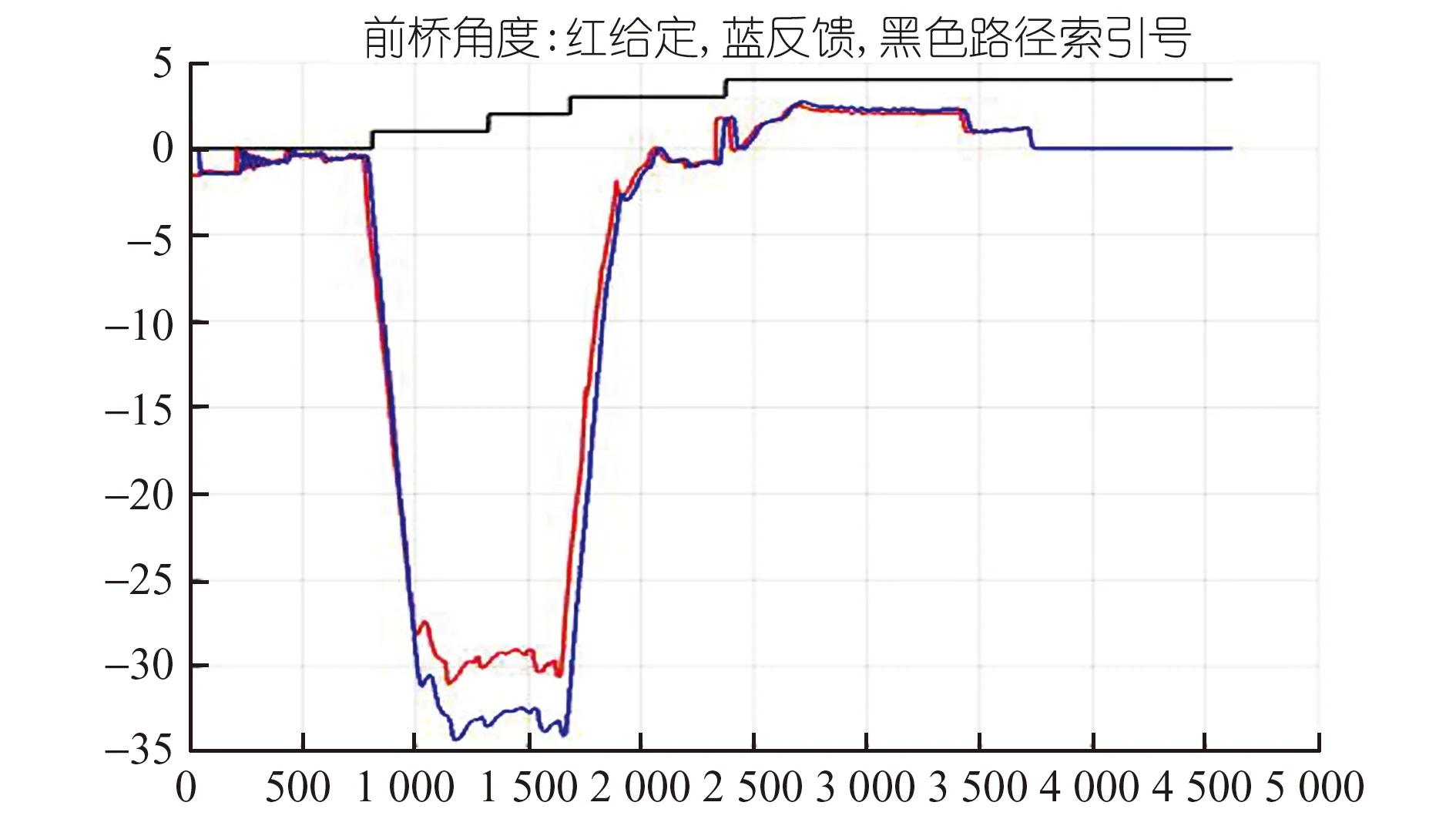
圖5 主動橋給定角度
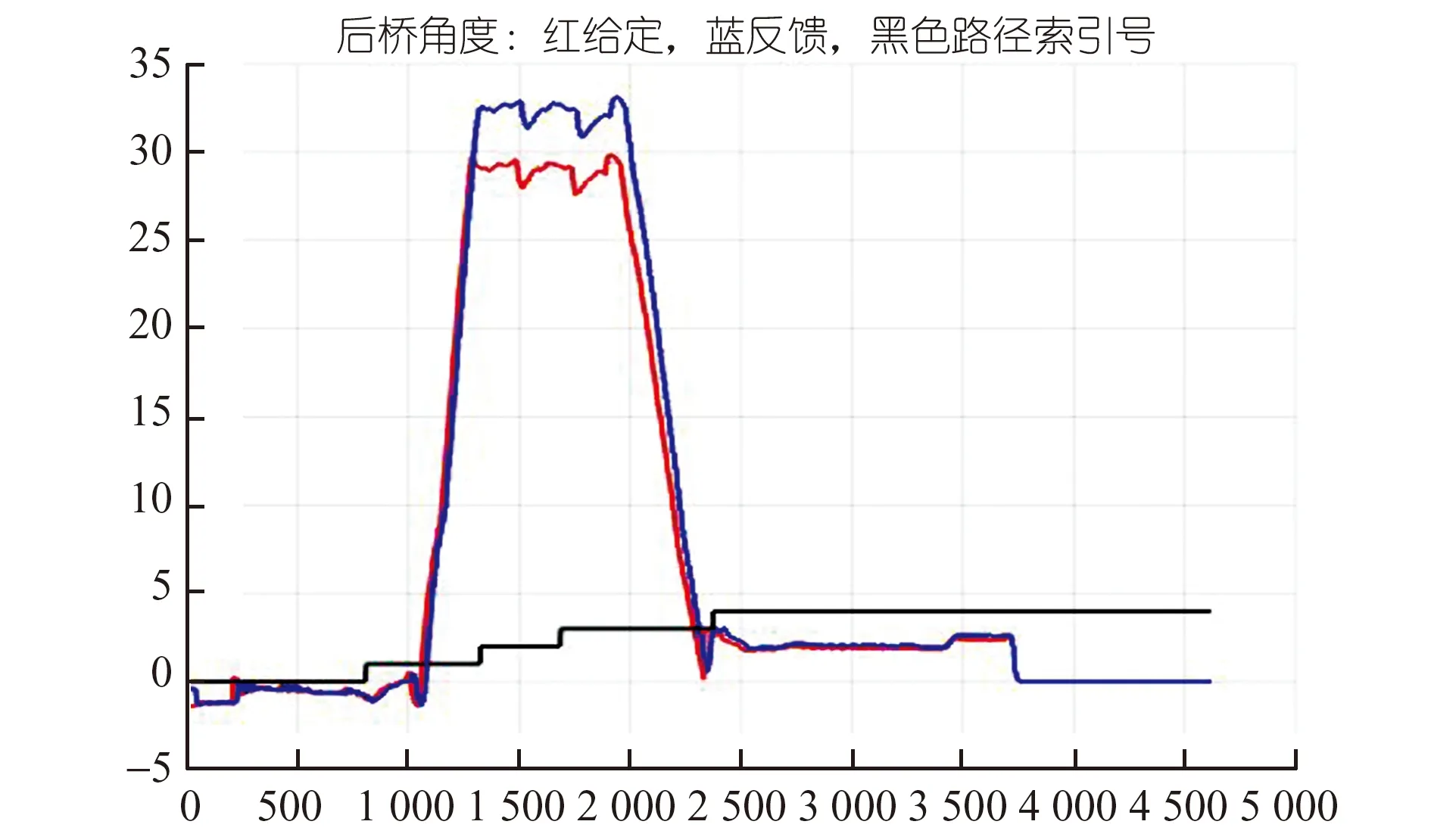
圖6 從動橋給定角度
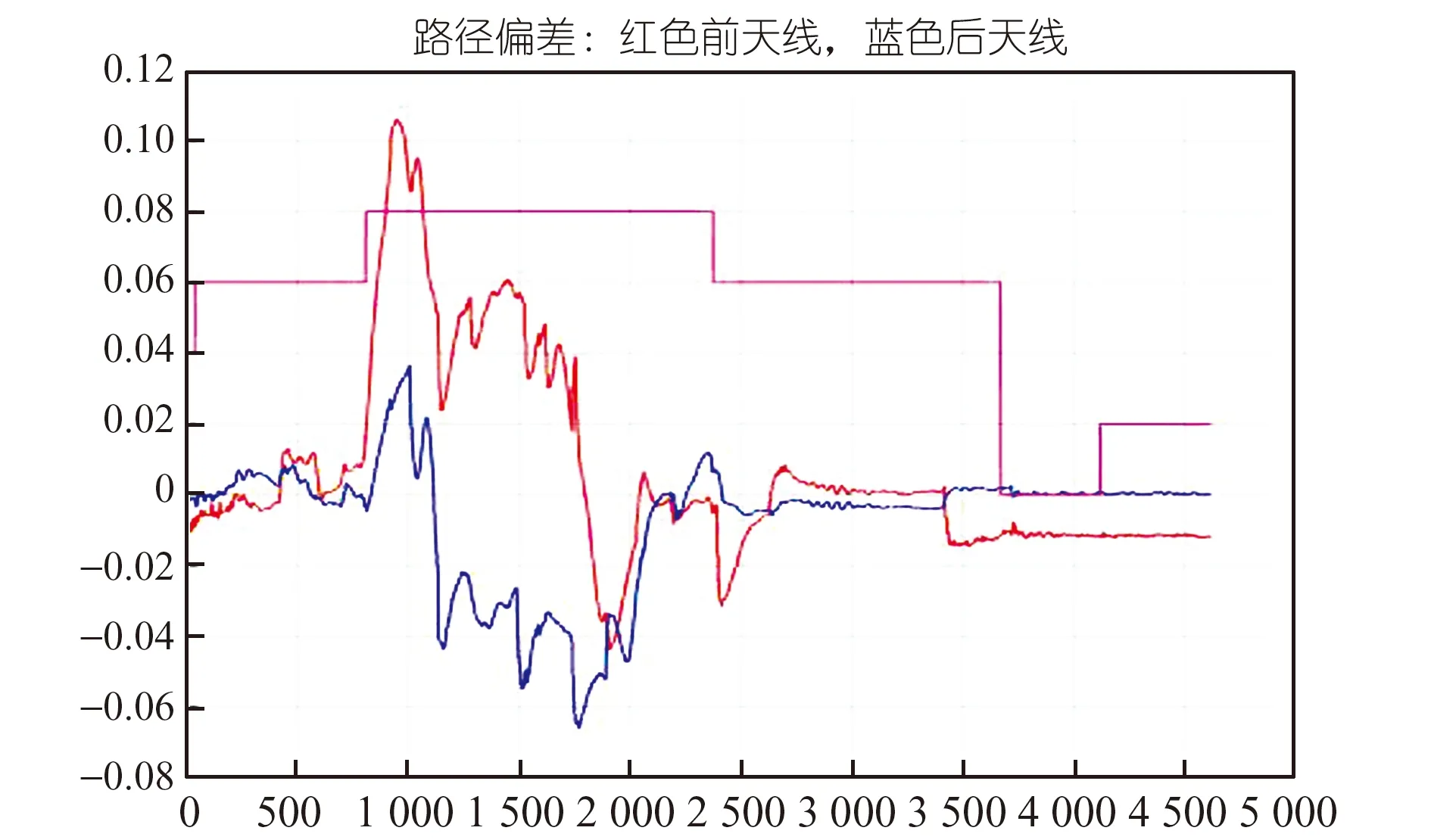
圖7 前后天線橫向路徑偏差
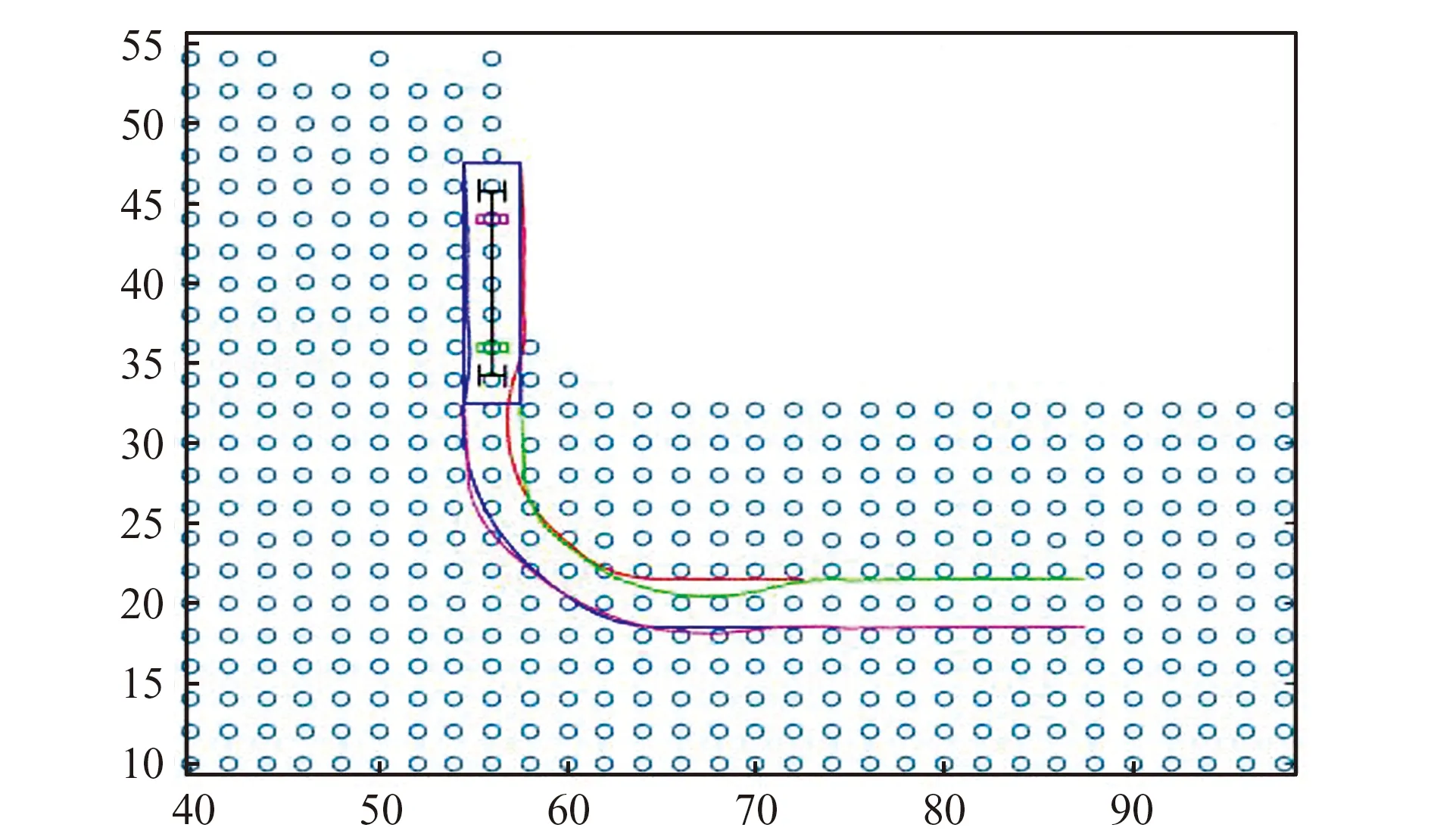
圖8 直角轉彎運行軌跡
4.2 工況二:橫行模式
橫行模式主要用于車輛在狹窄空間內進行變道作業,整個過程中車輛處于橫向移動狀態。最大橫向移動速度1 m/s,變道寬度4 m。由圖9~圖12可以看出,在當前運行速度下,整個行車過程中車輛航向角變化較小,停車時行車方向(Y)位置偏差小,非行車方向位置偏差(X)為80 mm左右,和前后車橋一致性以及轉向零位有一定關系。
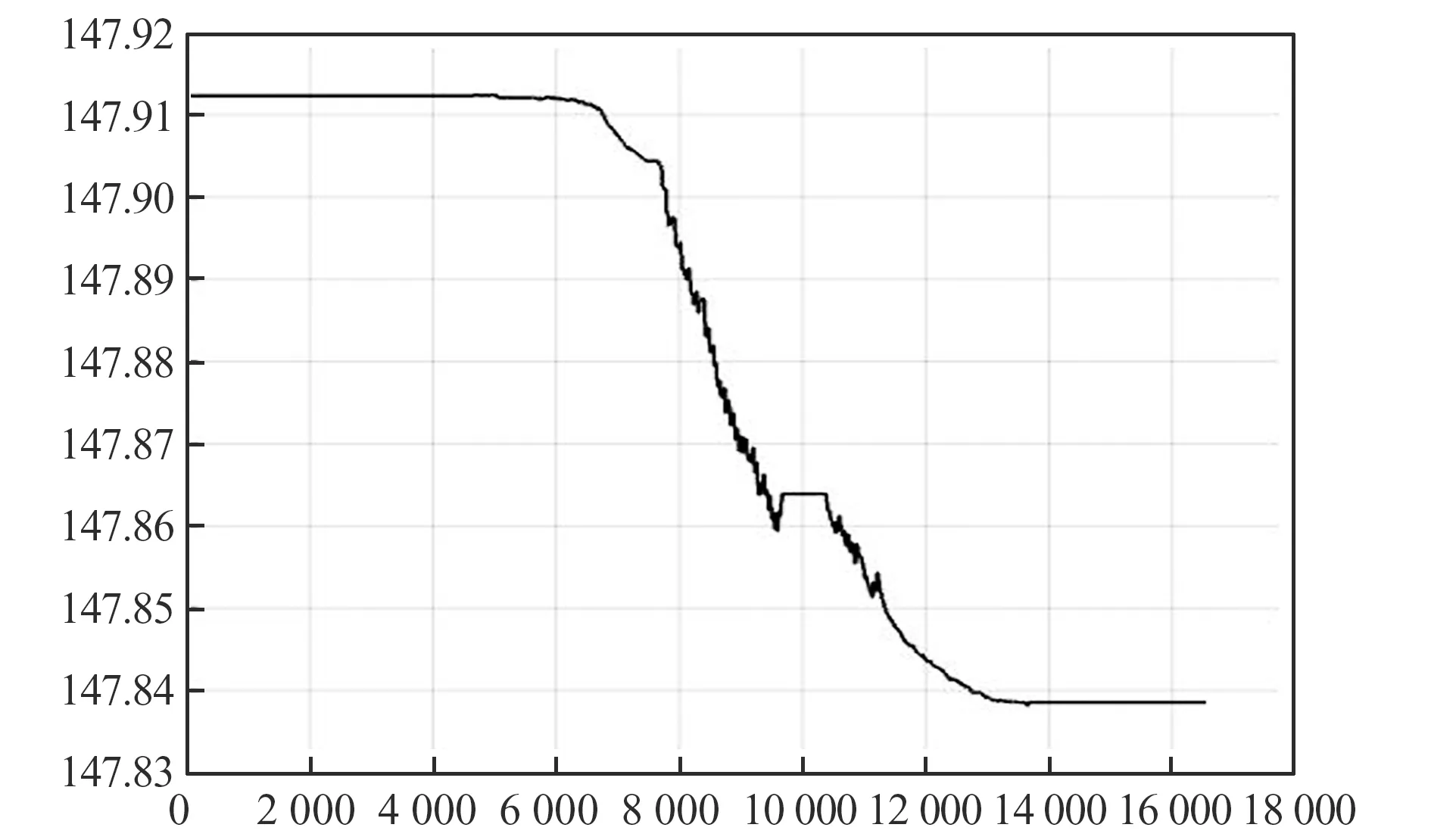
圖9 車輛中心點橫坐標X
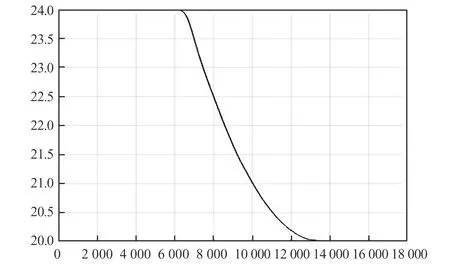
圖10 車輛中心點橫坐標Y
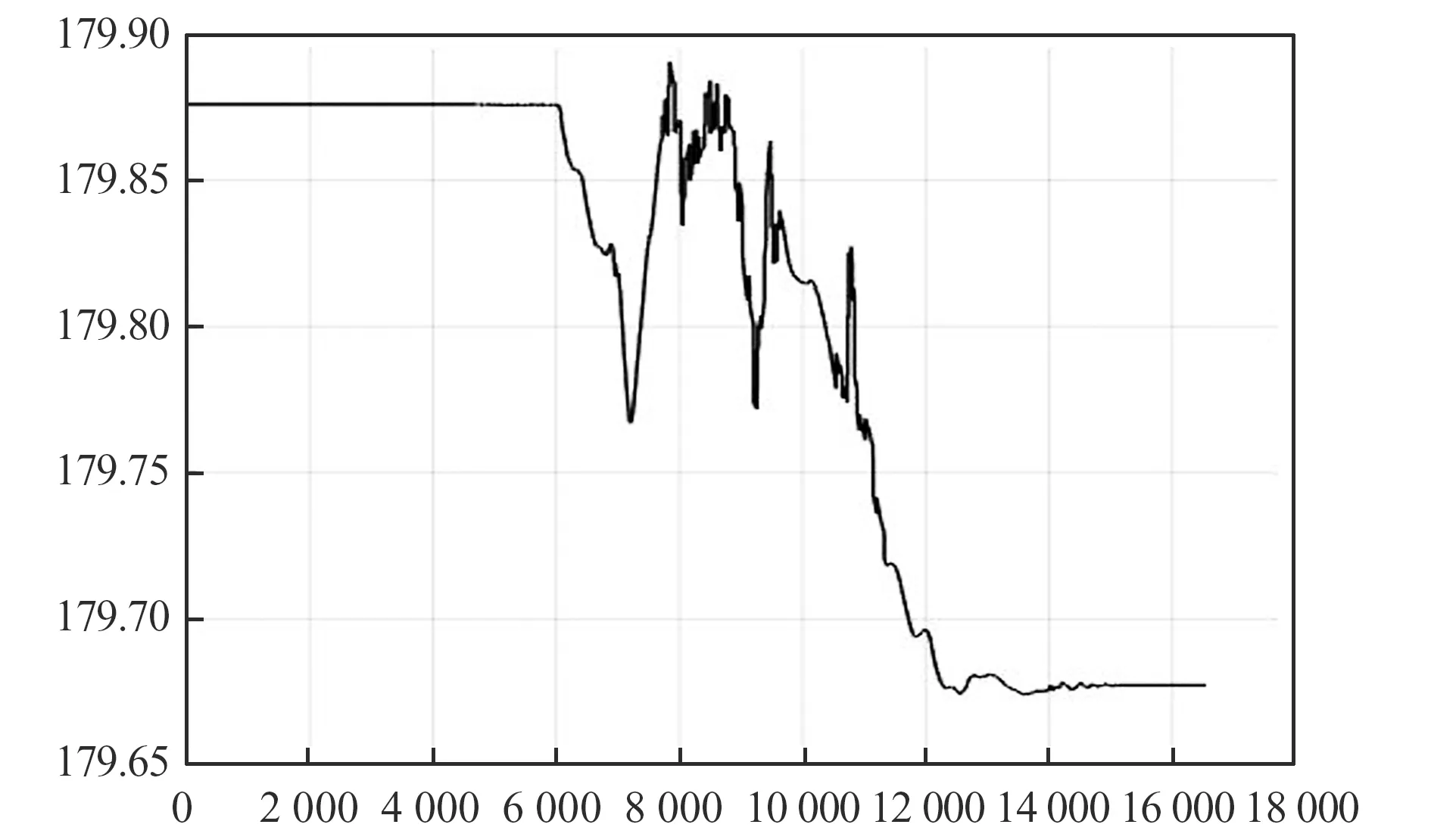
圖11 車輛航向角
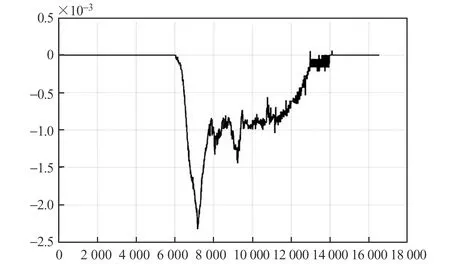
圖12 行車方向前進速度
4.3 工況三:原地轉向模式
原地轉向模式主要用于車輛小范圍內轉向調頭作業,整個過程中車身繞車輛中心點旋轉運動,整個指令主要完成模式切換和轉向運動,旋轉角度以及旋轉方向和單獨設置,最大橫向移動速度0.5 m/s,變道寬度4 m,轉向速度控制采用與上述行走控制相同的控制方式。由圖13~圖16可以看出,在當前運行速度下,整個行車過程中車輛航向角變化平穩,停車時角度方向偏差較小,但是經過一次完整轉向運動后,車輛中線點坐標偏離原來位置較大。主要原因為:①前后車橋機械安裝不一致以及轉向零位容易發生變化;②整個運行過程中由于很少或幾乎沒有探測到磁釘,無位姿矯正環節,連續轉向中純粹運動學估計帶來了一定位置偏差。
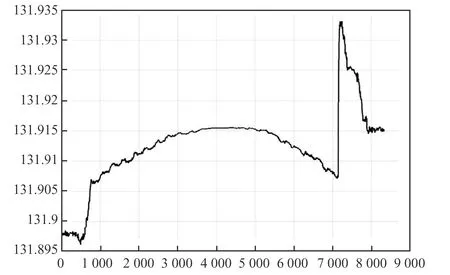
圖13 車輛中心點橫坐標X
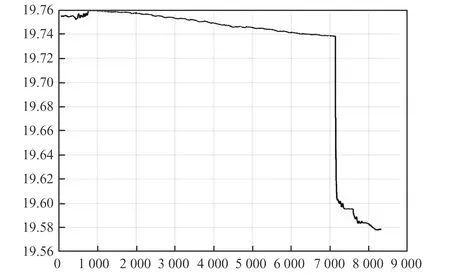
圖14 車輛中心點橫坐標Y
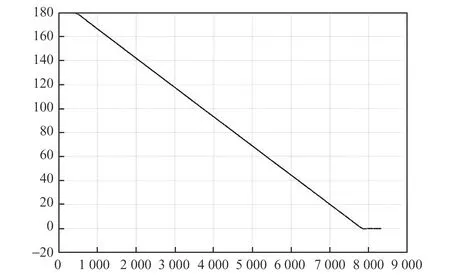
圖15 車輛航向角
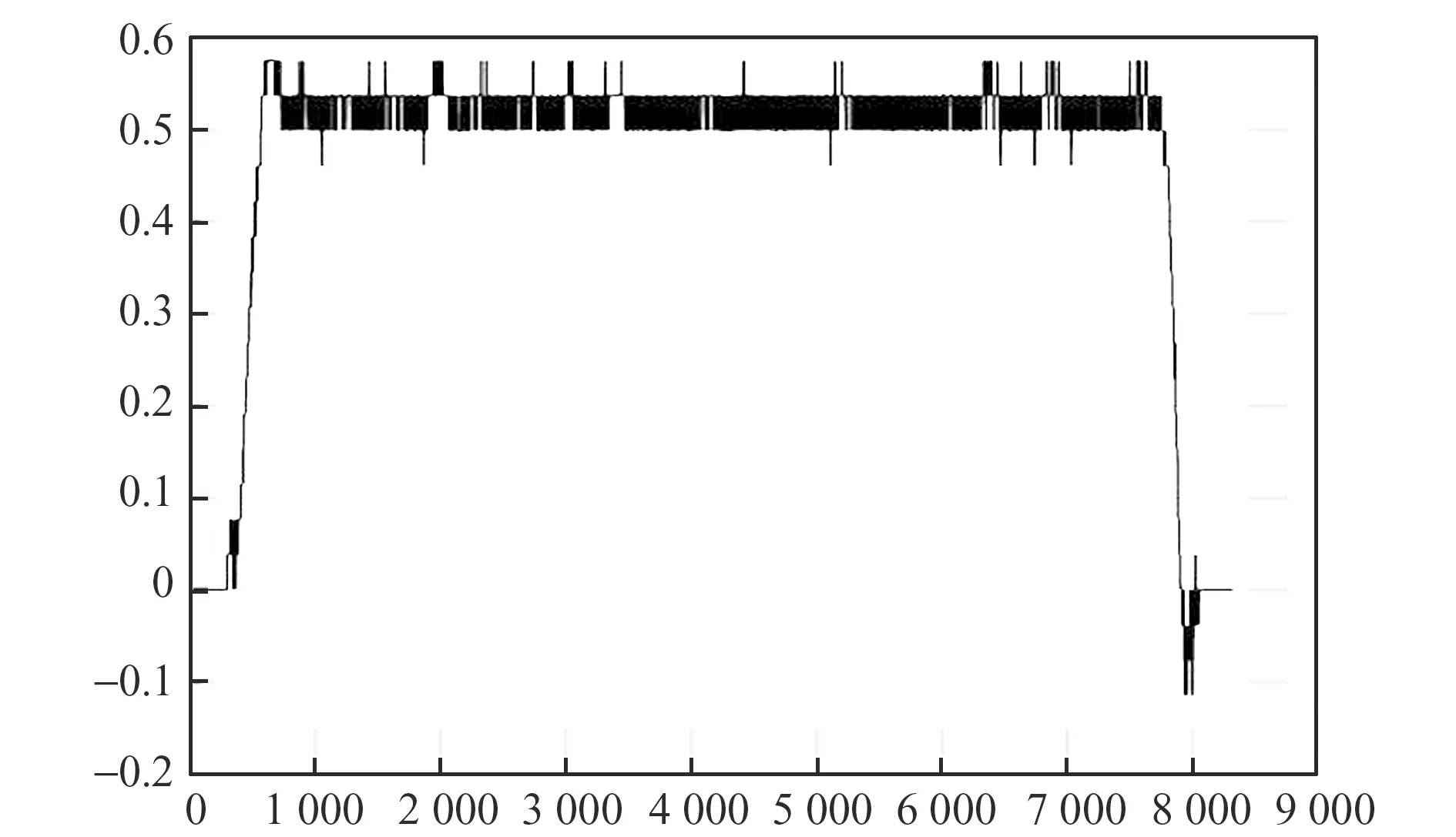
圖16 后左輪速反饋值
5 結語
試驗證明,車輛在各常見運行模式下的速度及轉向角度跟蹤控制效果良好,整個運行過程車輛運行平穩,前后控制點橫向路徑偏差較小,停車時位姿偏差較小,滿足碼頭實際作業要求。但考慮到車輛前后車橋機械安裝以及轉向零位差異,原地轉向效果還有待提高。基于車輛轉向運動學的實時糾偏控制方法可作為后續優化的主要方向。