混合空氣懸架多工況阻尼自匹配協調控制
2020-04-10 05:24:42
液壓與氣動 2020年4期
(西安科技大學 機械工程學院,陜西 西安 710054)
引言
空氣懸架不僅具有良好的非線性剛度特性,而且能根據實際需要調節車身高度,因而對于汽車行駛平順性以及行車安全性都具有重大意義[1]。
傳統空氣懸架一般由空氣彈簧與減振器并聯而成,近年來隨著空氣懸架理論模型研究的成熟,對空氣懸架的控制尤其是對于空氣懸架剛度與減振器阻尼的匹配控制問題,越來越成為國內外學者研究的重點[2-4]。MOSHCHUK NIKOLAI等[5]進行了剛度或阻尼可調的半主動空氣懸架建模分析以及試驗研究。HYUNSUP KIM等[6-7]將實車車身高度與車身姿態同時控制,并采用滑模控制策略完成車身高度模式之間的準確切換。汪少華等[8]同時考慮了直線行駛工況和轉向行駛工況,研究了半主動空氣懸架混雜系統的多模式切換控制,實現了彈簧與阻尼的解耦,改善了空氣懸架的各項動態性能。
上述研究均是在勻速工況下進行的,沒有考慮行駛工況對懸架性能的影響。而汽車行駛是一個復雜多變的過程,單一工況的研究并不具有代表性。本研究針對這一問題,提出一種基于空氣彈簧和直線電機作動器的混合空氣懸架結構,根據不同行駛工況的要求設計混合空氣懸架多模式阻尼自匹配的控制策略,并進行仿真分析和臺架試驗。
1 混合空氣懸架原理與模型
混合空氣懸架系統結構如圖1所示,主要由空氣彈簧系統、直線電機作動器等部分組成。其中空氣彈簧系統由空氣彈簧、空氣壓縮機、儲氣罐、電磁閥控制器及傳感器組成。直線電機作動器由直線電機、功率模塊電路、控制器及相應的信號檢測裝置組成。
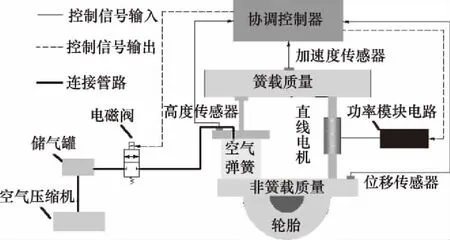
圖1 混合空氣懸架結構圖
混合空氣懸架的工作原理為:根據汽車行駛工況的不同,控制器ECU控制空氣彈簧系統中的電磁閥的開閉狀態實現對空氣彈簧充放氣,根據高度傳感器的輸入信號使彈簧處于相應的工況高度模式;同時,車輪受到不平路面的振動激勵,車身產生振動,安裝的加速度傳感器和位移傳感器將采集到的信號輸入給控制器,控制器根據控制算法計算出相應高度模式下理想阻尼力,輸出控制信號對直線電機進行阻尼系數的自適應匹配。
2 混合空氣懸架動力學模型的建立
2.1 1/4車輛懸架動力學模型
根據圖2利用牛頓運動定律,可以得:
(1)
式中,ms—— 簧載質量
K—— 空氣彈簧剛度,其值是可變的
cg—— 可變阻尼系數
mu—— 非簧載質量
Kt—— 輪胎剛度
xq—— 路面輸入
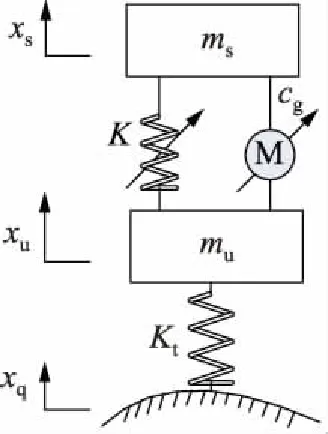
圖2 二自由度懸架動力學模型
2.2 空氣彈簧數學模型
圖3為空氣彈簧受力圖,其有效剛度在汽車行駛過程中是動態變化的[9-10]。
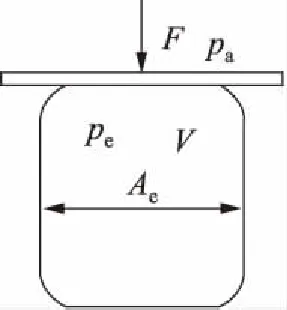
圖3 空氣彈簧受力圖
根據圖3,空氣彈簧彈性力可表達為:
F=(p-pa)Ae=peAe
(4)
假設空氣彈簧內的氣體為理想氣體,根據理想氣體狀態方程則有:
(5)
式中,F—— 空氣彈簧彈性力
pa—— 大氣壓力
p—— 氣囊內氣體絕對壓力
Ae—— 空氣彈簧有效面積
p0—— 氣囊內初始氣體壓力
pe—— 氣囊內氣體相對壓力
V—— 空氣彈簧有效容積
κ—— 熱力學指數
(6)
(7)
2.3 直線電機數學模型
直線電機可用作電動機亦可用作發電機。假設所研究的直線電機為理想發電機,則發電機產生的電壓可表達為[11-12]:
(8)
電機發電阻力可表示為:
Fg=ki·i
(9)
(10)
式中,ke—— 發電機反電動勢系數
ki—— 電機的推力系數
i—— 電機線圈電流
Fg—— 電磁阻尼力
r—— 電機線圈內阻
R—— 可變電阻
3 混合空氣懸架多工況阻尼自匹配協調控制策略
3.1 多工況阻尼自匹配協調控制原理
汽車行駛過程是一個復雜的動態過程,會根據行車環境在不同工況下進行轉換,所以在對汽車性能進行研究時,需要考慮汽車的行駛工況[13]。
混合空氣懸架多工況阻尼自匹配協調控制:以優先控制空氣彈簧高度模式為原則,根據行駛工況對空氣彈簧多工況模式的控制和在各個模式下根據懸架動態響應反饋的直線電機阻尼力自匹配。其控制框圖如圖4所示。
控制器通過車速信號對行駛工況進行判別,從而確定空氣彈簧的高度模式,由于各高度模式下對懸架系統控制要求的側重不同,所以不同模式下根據懸架動態響應的反饋,采用混合天棚-地棚控制算法對所需理想阻尼力進行匹配,將理想阻尼力輸入直線電機作動器,調節可變電阻控制直線電機可調電磁阻尼力,并作用于懸架系統。
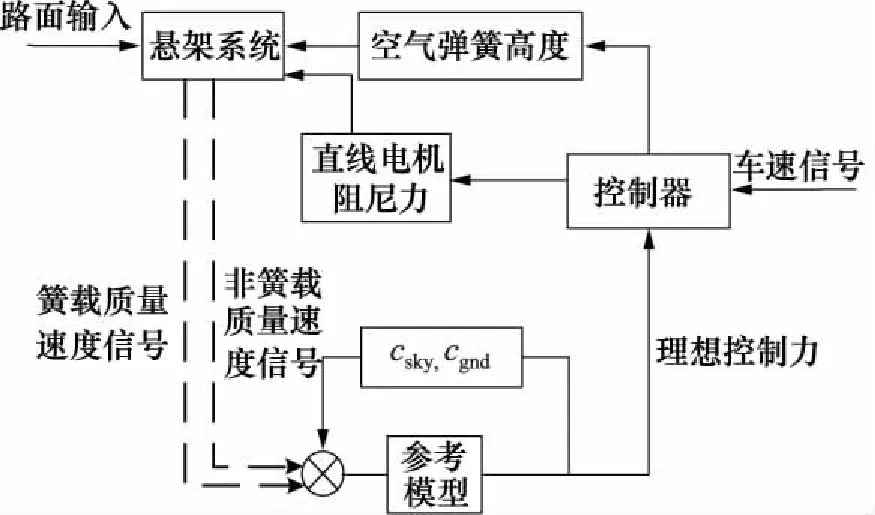
圖4 混合空氣懸架多工況阻尼自匹配協調控制框圖
3.2 空氣彈簧多工況模式分析
不同的承載和行駛路況,設置不同的高度模式,選擇合適的車輛行駛高度,可以有效提升車輛性能,根據行駛工況對空氣彈簧多工況模式進行分析,其對應關系如圖5所示。
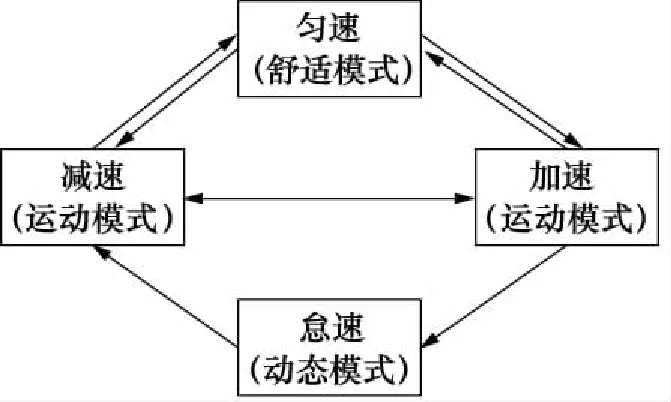
圖5 各行駛工況與懸架模式之間的關系
1) 舒適模式
舒適模式是指汽車在勻速工況下,基于固有頻率與懸架高度的關系確定彈簧高度,以保證汽車的行駛平順性。懸架的固有頻率是衡量汽車平順性的重要參數,它由懸架剛度和懸架彈簧支承的質量(簧載質量)所決定[14-15]。人體所習慣的垂直振動頻率約為1~1.6 Hz。車身振動的固有頻率應接近或處于人體適應的頻率范圍,才能滿足舒適性要求。懸架固有頻率為:
(11)
舒適模式以車身加速度為主要指標,適當降低懸架的固有頻率f可以明顯減小車身加速度,改善汽車的平順性。對式(7)中空氣彈簧氣體柱H的單位由m轉換為mm,任意狀態下空氣懸架的固有頻率:
(12)
圖6為混合空氣懸架的固有頻率與氣囊初始氣壓和空氣彈簧高度的關系圖,其中X坐標軸表示空氣彈簧高度,Y坐標軸表示氣囊初始氣壓,Z坐標為懸架固有頻率。在相同初始氣壓狀態下,懸架的固有頻率隨著空氣彈簧高度H的增加而減小,在同一高度下,懸架的固有頻率隨著初始氣壓的增大而增大。因此對空氣彈簧高度以及氣囊內初始壓力進行控制,可以使懸架固有頻率保持在所需范圍內或實現懸架的等頻振動。
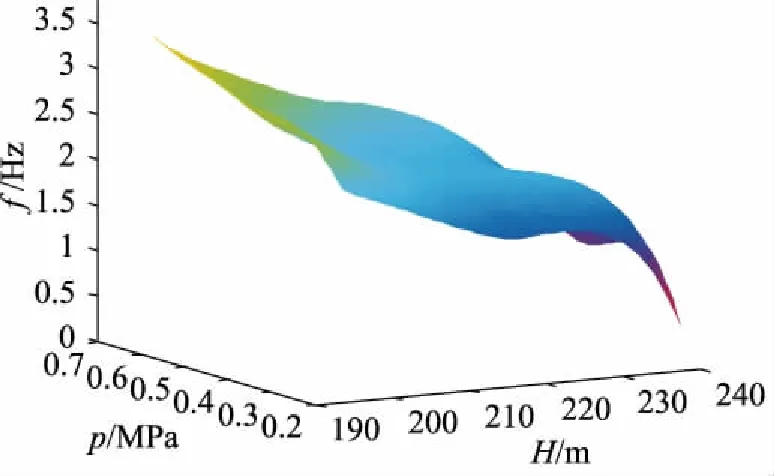
圖6 固有頻率與氣囊初始氣壓和彈簧高度的關系
2) 運動模式
運動模式是指汽車在加/減速工況下,基于車身高度與懸架高度之間的變化關系確定彈簧高度,以保證汽車的安全性。當汽車急速起步或加速行駛時,由于慣性力及驅動力的作用會使車尾下蹲,產生后仰現象;當汽車在高速行駛中急剎車時,由于慣性力和輪胎與地面摩擦力的作用會使車頭下沉,產生制動點頭現象。不管是加速后仰現象還是制動點頭現象都會對行駛安全性和乘坐舒適性造成不利的影響。
懸架高度直接影響車輛質心高度,汽車懸架越高,質心就會越高。在有慣性力的情況下,各車輪上的受力變動量就越大。適當降低汽車的質心高度可以增大汽車的抓地性降低輪胎動載,提高汽車的安全性。質心高度與懸架高度之間存在關系式:
(13)
ΔH=Δhs
(14)
式中,hg—— 整車質心高度
hs—— 簧載質量質心高度
hu—— 非簧載質量質心高度
ΔH—— 懸架高度變化值
Δhs—— 簧載質量質心高度變化值
3) 動態模式
動態模式是指汽車處于怠速工況時,怠速工況分為駐車怠速和行車怠速,在該模式下懸架高度保持前一時刻彈簧高度狀態不變,即混合空氣懸架處于動態變化過程。
3.3 直線電機阻尼自匹配分析
直線電機的阻尼自匹配是指在混合空氣懸架多工況模式的基礎上,根據各個工況模式下懸架的動態響應反饋基于參考模型對不同模式下所需阻尼力自動匹配的控制。
由空氣彈簧多工況模式分析可知,舒適模式和運動模式分別以乘坐舒適性和行駛安全性為主要評價指標,即在不同模式下分別對車身加速度和輪胎動載荷進行控制。由于在改善簧載質量振動特性的同時會在一定程度上惡化非簧載質量的振動特性,因此理想阻尼力參考模型采用混合天棚-地棚控制。
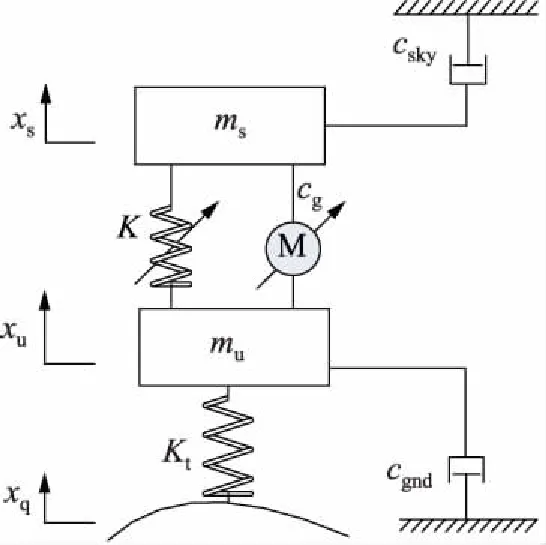
圖7 混合天棚-地棚控制懸架原理圖
圖7為混合天棚-地棚控制懸架的原理圖。天棚控制算法是在車體和假設天棚之間安裝1個阻尼器,該阻尼器的阻尼系數稱為天棚阻尼系數。地棚控制算法和天棚控制算法的控制原理基本相同,不同的是天棚控制直接作用在簧載質量上能有效抑制車身加速度,而地棚控制是直接作用于非簧載質量上,對輪胎動載荷有更好的改善作用。混合天棚-地棚控制綜合兩者優點,兼顧了汽車的乘坐舒適性和行駛安全性。混合天棚-地棚控制的理想阻尼力為:
F′=βFsky+(1-β)Fgnd
理想天棚阻尼力和理想地棚阻尼力分別為:
(15)
(16)
由式(10)、式(16)和式(17)可以得到直線電機作動器的可變電阻值為:
(17)
(18)
最終可得到直線電機作動器阻尼力自匹配時可變電阻值為:
R′=βRsky+(1-β)gnd
(19)
本研究著重考慮勻速工況和加/減速工況,所以調節因子β的取值為:舒適模式β=0.65;運動模式β=0.45。
4 仿真分析
為了驗證混合空氣懸架結構以及多模式阻尼自匹配協調控制的效果,本研究利用Simulink軟件建立模型進行仿真分析。該懸架系統的主要參數如下:ms=320 kg,mu=30 kg,ke=68.4,Kt=150000 N/m,ki=25π,r=0.003 Ω,α=0.0186,Ae0=0.0381 m2天棚阻尼系數csky=2000 N·s/m,地棚阻尼系數為cgnd=2400 N·s/m。
4.1 各模式下的仿真
為了驗證不同工況模式下混合空氣懸架的效果,分別在舒適模式狀態和運動模式狀態下對懸架動態響應進行仿真分析,并與被動懸架以及傳統空氣懸架進行對比,此時直線電機作動器的電磁阻尼力為固定值。其仿真結果如圖8~圖10。
表1 懸架響應的均方根值
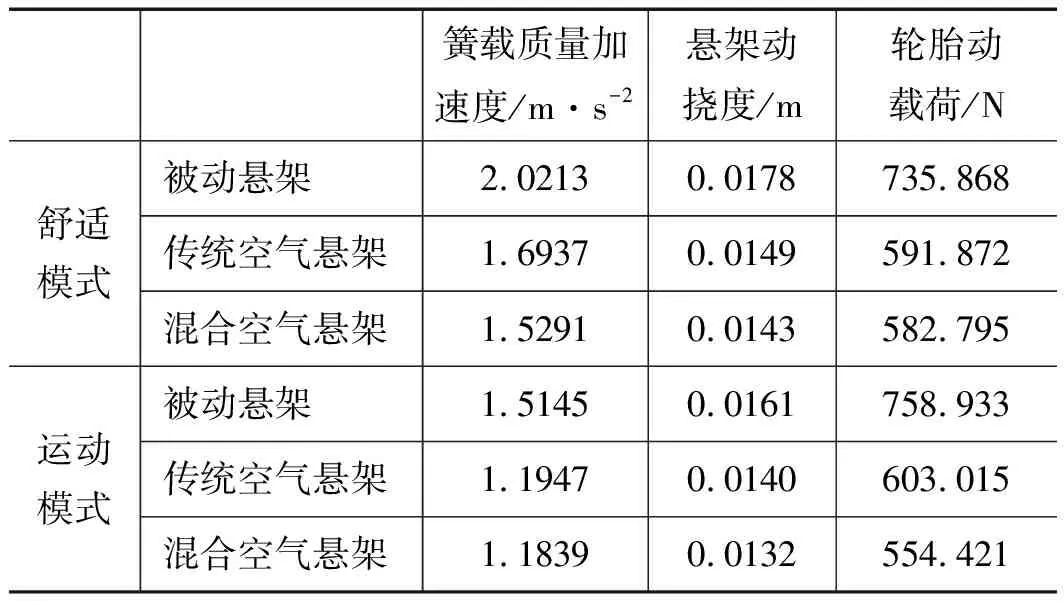
簧載質量加速度/m·s-2懸架動撓度/m輪胎動載荷/N舒適模式被動懸架2.02130.0178735.868傳統空氣懸架1.69370.0149591.872混合空氣懸架1.52910.0143582.795運動模式被動懸架1.51450.0161758.933傳統空氣懸架1.19470.0140603.015混合空氣懸架1.18390.0132554.421
由圖8~圖10、表1可以得出,當懸架系統處于舒適模式狀態下,混合空氣懸架的簧載質量垂直加速度均方根值相比于傳統空氣懸架降低9.72%,相比于被動懸架降低24.35%; 懸架動撓度均方根值和輪胎動載荷均方根值與被動懸架相比分別下降19.66%和20.79%,相比于傳統空氣懸架改善較小。當懸架系統處于運動模式狀態下,混合空氣懸架的輪胎動載荷均方根值相比于傳統空氣懸架降低12.08%,相比于被動懸架降低27.02%;簧載質量加速度均方根值和懸架動撓度均方根值與被動懸架相比分別下降21.83%和18.01%,相比于傳統空氣懸架改善較小。
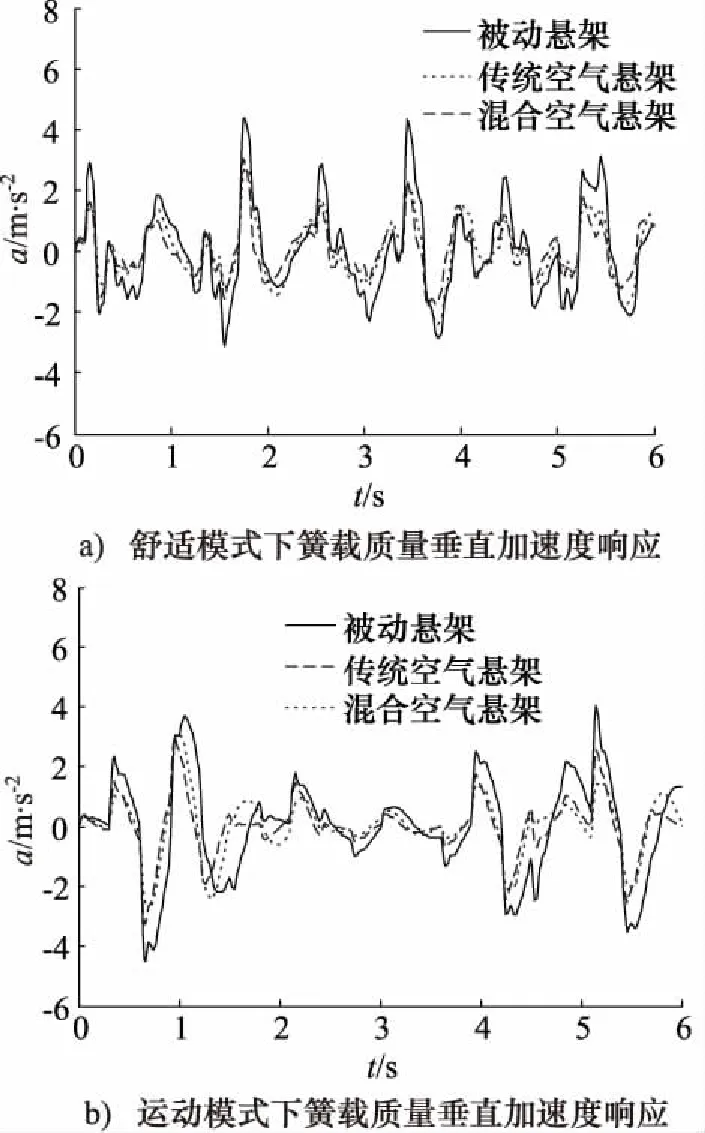
圖8 簧載質量垂直加速度響應
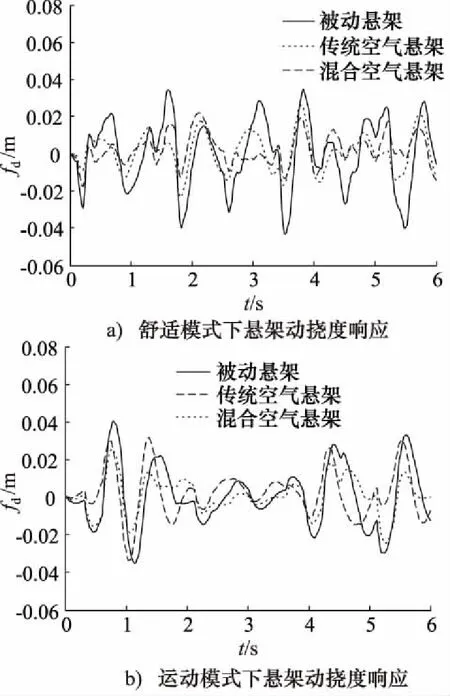
圖9 懸架動撓度響應
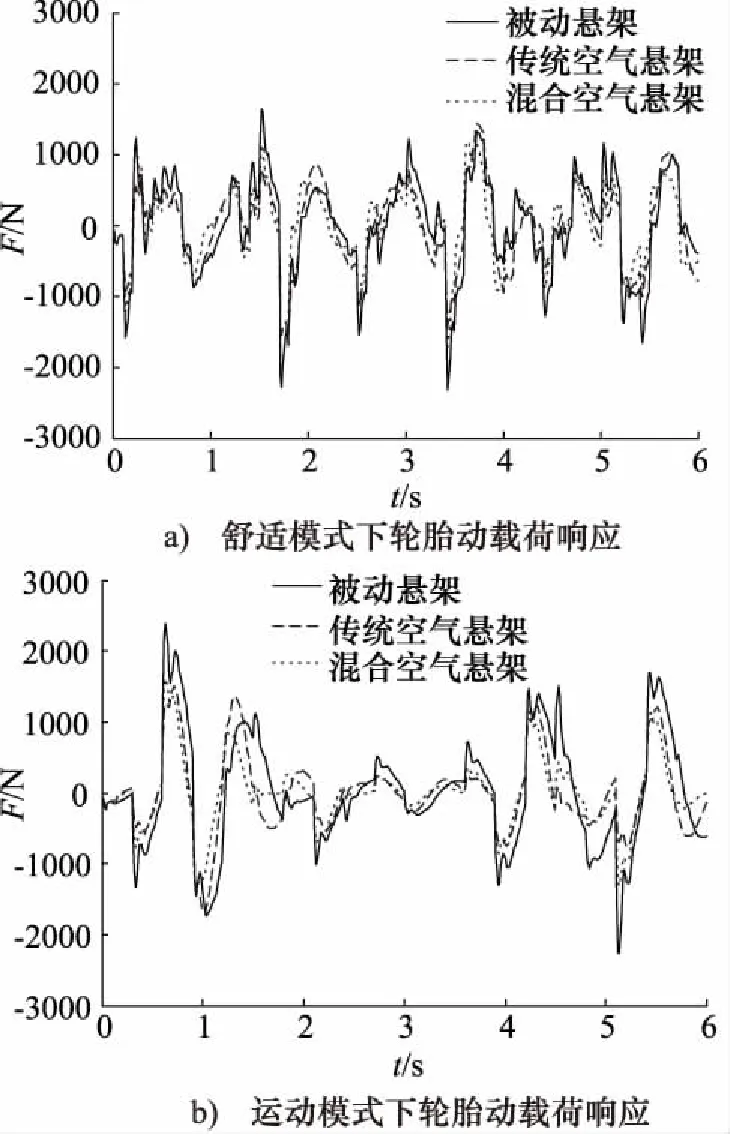
圖10 輪胎動載荷響應
4.2 多工況阻尼自匹配協調控制仿真
為了驗證多工況阻尼自匹配協調控制在不同行駛工況下的優越性,基于UDC(Urban Driving Cycle,城市循環)工況對比分析控制前后懸架的動態性能。利用Simulink軟件中的Signal Builder功能模塊,建立了不同循環單元的車速變化模型,如圖11所示。
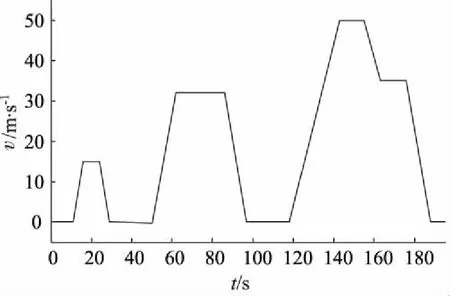
圖11 模擬UDC工況車速變化模型
由于仿真時間較長,為清晰的顯示各工況懸架動態響應情況,截取各工況模式下部分響應進行分析,如圖12所示,0~1 s內車輛為怠速狀態,1~4.5 s內車輛為加速狀態,4.5~6 s內車輛為勻速行駛狀態。

圖12 UDC工況下仿真結果對比
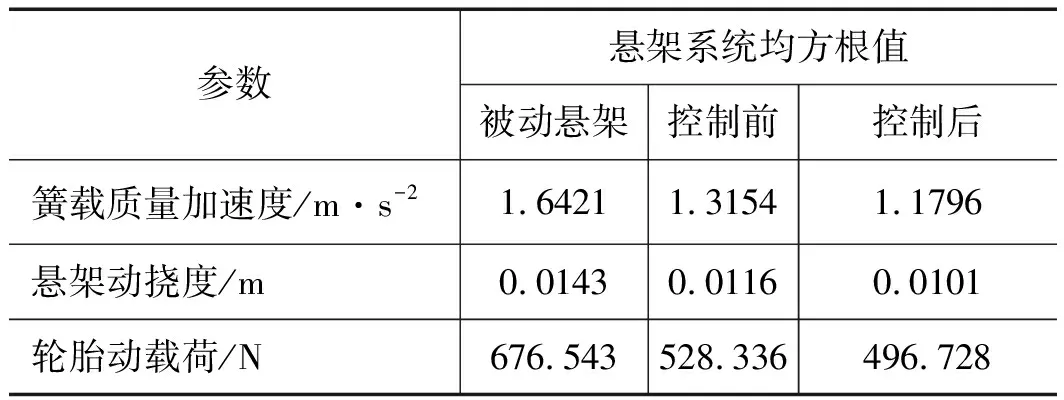
表2 UDC工況下懸架響應的均方根值
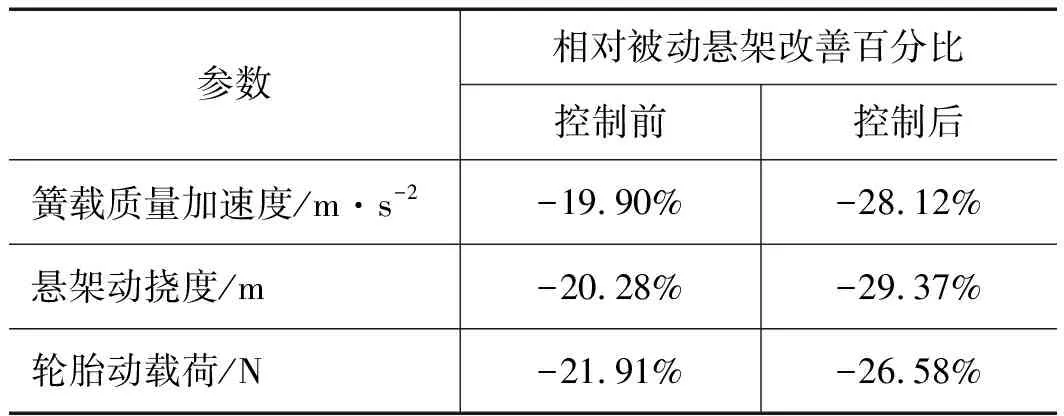
表3 仿真結果比較
由圖12和表2可以看出,模擬UDC工況,混合空氣懸架在多工況阻尼自匹配協調控制下懸架性能相比于被動懸架更大程度得到改善,其中車身垂直加速度的均方根值降低了28.12%;懸架動撓度的均方根值降低了29.37%;輪胎動載荷的均方根值降低了26.58%。
對懸架各指標在0~100 Hz進行α分析,結果如圖13所示。

圖13 懸架響應的頻率特性分析
在低頻區域,混合空氣懸架多工況協調控制有效改善了垂直加速度和輪胎動載荷的頻率特性,同時保證了低頻振動時的車輛平順性和行駛安全性,而懸架動撓度在低頻區有一定程度的惡化,但其值也均在限定范圍內。在中高頻區域,各項指標均有一定程度的改善,反映出混合空氣懸架多工況協調控制策略的有效性。
5 混合空氣懸架臺架試驗
對混合空氣懸架開展臺架試驗,驗證多工況阻尼自匹配協調控制的有效性,其試驗測試系統如圖14所示。該系統主要由ES-6-230電動振動臺、上下橫梁、導向機構、DSP控制器、脈沖信發生器、數據采集與處理系統等組成。結合試驗條件和驗證目標,利用脈沖信號發生器輸出脈沖信號模擬工況變化傳給DSP控制器,在試驗臺上橫梁處安裝加速度傳感器采集簧載質量加速度信號傳給DSP控制器, DSP控制器根據設計的控制策略,改變空氣彈簧工作模式并使直線電機

圖14 混合空氣懸架臺架試驗系統
輸出作動力從而完成對懸架的控制。
由于受試驗條件的限制,本次試驗在幅值為30 mm、頻率為3 Hz的正弦模擬路面激勵下進行且忽略了怠速工況的影響,采樣簧載質量加速度進行對比,試驗結果如圖15和表4。
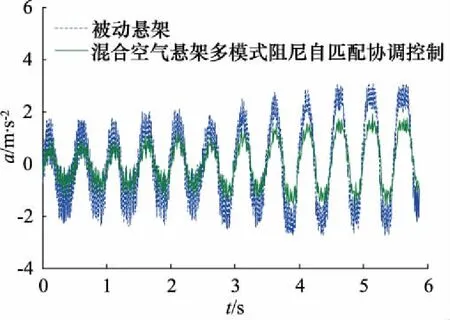
圖15 試驗條件下簧載質量加速度響應
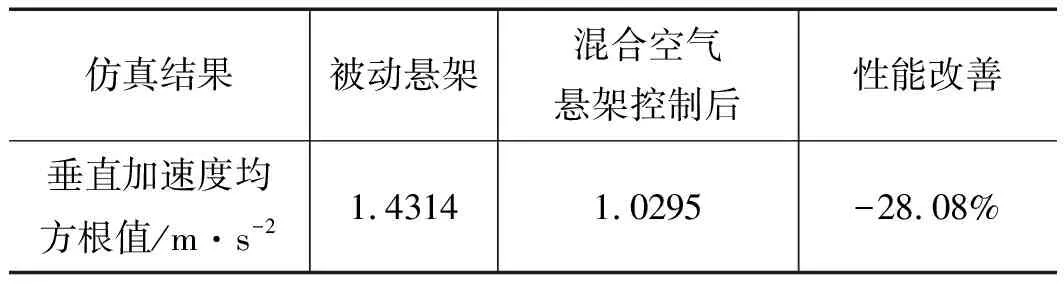
表4 簧載質量加速度均方根值
由圖15與表4可知,采用多工況阻尼自匹配協調控制的混合空氣懸架在正弦路面激勵下,簧載質量加速度均方根值下降28.08%,驗證了混合空氣懸架多模式阻尼自匹配控制的有效性,能夠有效減小簧載質量加速度,提高懸架的動態特性。
6 結論
(1) 提出了一種基于空氣彈簧和直線電機作動器的混合空氣懸架結構。結合空氣彈簧的動剛度特性,基于不同行駛工況要求制定了空氣彈簧的高度模式,以乘坐舒適性和行駛安全性為目標設計了混合天棚-地棚控制設計了直線電機多工況阻尼自匹配控制策略;
(2) 在UDC工況環境下進行了時域和頻域仿真,結果表明:在UDC工況下,混合空氣懸架中直線電機作動器能夠有效自匹配各個模式下所需阻尼力,車身垂直加速度的均方根值降低了28.12%;懸架動撓度的均方根值降低了29.37%;輪胎動載荷的均方根值降低了26.58%;懸架的各項動態性能都明顯改善;
(3) 以幅值為30 mm、頻率為3 Hz的正弦激勵作為路面譜輸入,開展了混合空氣懸架多工況自匹配協調控制臺架試驗研究,結果顯示簧載質量加速度均方根值下降了28.08%,驗證了仿真結果的正確性。