漂角修正的欠驅動船舶航向魯棒自適應控制
2020-04-09 04:34:57陸瀟楊劉志全褚振忠
上海海事大學學報 2020年1期
陸瀟楊 劉志全 褚振忠
摘要:針對復雜海況下欠驅動船舶航向運動的非線性特性和海浪擾動問題,基于漂角修正設計一種反步航向控制器,并結合非線性擾動觀測器提出一種魯棒自適應控制方法。通過非零漂角對航向誤差進行修正,利用非線性擾動觀測器對艏搖方向存在的海浪擾動進行有效的估計,通過Lyapunov理論證明非線性擾動觀測器與控制器結合后閉環系統的穩定性。仿真結果表明,提出的魯棒自適應控制方法可以有效減小航向誤差,提高航向控制性能。
關鍵詞: 航向控制; 欠驅動船舶; 漂角; 反步法; 非線性擾動觀測器
中圖分類號: U664.82 ? ?文獻標志碼: A
Abstract: For the nonlinear characteristics and wave disturbance problem of underactuated ship heading motion under complex sea conditions, a backstepping heading controller is designed with sideslip angle amendment, and a robust adaptive control method is proposed by combining the nonlinear disturbance observer. The heading error is amended by a non-zero sideslip angle. The nonlinear disturbance observer is used to estimate the wave disturbance effectively in the yaw direction. The stability of the closed-loop system, where the nonlinear disturbance observer and the controller are combined, is proved by the Lyapunov theory. The simulation results show that the proposed robust adaptive control method can effectively reduce heading error and improve the heading control performance.
Key words: heading control; underactuated ship; sideslip angle; backstepping method; nonlinear disturbance observer
0 引 言
船舶航行中的航向控制問題一直以來都是人們的研究熱點。許多先進的控制理論被應用在航向控制中并取得了很大的進展,但仍存在局限性。文獻[1-2]提出了基于神經網絡的自適應輸出反饋控制方法,解決船舶的不確定性和未知界的外部干擾問題,無須提前獲取水動力具體函數表達式,但計算速度慢且需要昂貴的在線設備。ZHANG等[3]利用反饋線性化算法避免了對系統穩定性的復雜證明過程,但沒有考慮輸入飽和限制且需要高精度模型。文獻[4-5]利用模糊自適應方法解決了擾動和不確定性衰減/抑制問題,但控制規則通常很難確定和優化。
反步法將額外產生的非線性引入控制過程,以消除系統中不希望出現的非線性,具有完備的自適應和魯棒控制理論。張顯庫[6]將反步法與閉環增益成形算法相結合設計了航向控制器,HU等[7]提出了一種結合自適應命令濾波反推和最小參數學習的控制算法,彭秀艷等[8]針對海浪濾波和狀態估計問題提出了反步自適應輸出反饋控制器。文獻[9-10]利用滑模控制在不使用附加傳感器的情況下處理未知或不確定外部干擾。基于確定的線性模型,朱齊丹等[11]將滑模觀測器與反步控制器結合進行航向控制,但對于非線性系統,結合后的穩定性需要進一步分析。
在大多數的船舶控制研究中,一般選擇所需路徑的切線方向為期望航向,漂角很少被考慮。漂角是當船舶在不對稱水流的影響下發生偏轉時船體的縱剖面與水流速度方向之間的夾角,對船舶操縱存在一定的影響。假設船舶精確地遵循航線航行而不產生任何偏移,但由于漂角不為零,需要航向誤差來補償,所以傳統定義的航向誤差不能為零,非零航向誤差將導致船舶偏離航線,與假設相悖。因此,船舶實際速度方向與船舶在路徑跟蹤中的航向之間相差一個漂角,由此可以推斷出真正的運動方向與期望航向之間也相差一個漂角,故提出利用漂角對航向誤差進行修正。
本文針對復雜海況下船舶航向控制的非線性特性和海浪擾動問題,利用漂角對航向誤差進行修正,基于反步法,結合非線性擾動觀測器,提出一種帶漂角修正的欠驅動船舶航向魯棒自適應控制方法。通過Lyapunov理論證明非線性擾動觀測器與控制器結合后閉環系統的穩定性,仿真結果表明本文提出的控制算法能改善船舶航向控制性能,能在較短時間內有效減小航向誤差并達到穩定。
1 問題描述
1.1 欠驅動船舶動力學模型
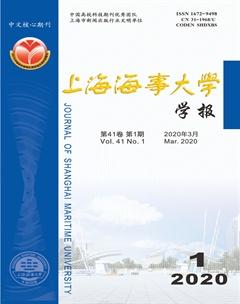
如圖1所示:u、v和r分別表示船舶的縱蕩速度、橫蕩速度和艏搖角速度;vc和βc表示海流在大地坐標系OXOYO中的速度及其方位角;ψ和ψd分別表示船舶航向角和期望航向角。為便于控制器的設計,假設:船舶垂蕩、橫搖、縱搖運動可忽略不計;船舶航向控制縱蕩速度u由獨立控制系統控制,故假設其為常數;橫蕩速度v與船舶操縱中其他運動變量相比較小,故設其被動有界。因此,船舶運動可以簡化為橫蕩和艏搖方向上的兩自由度運動。
3.2 航向角
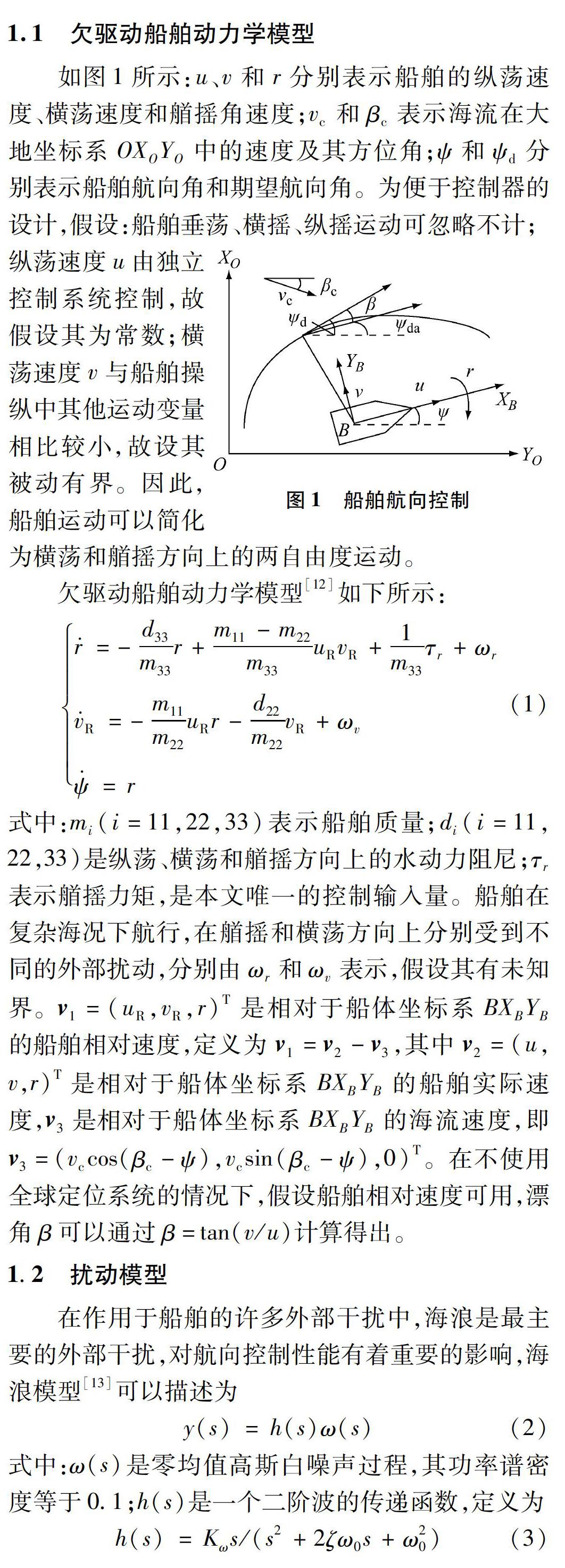
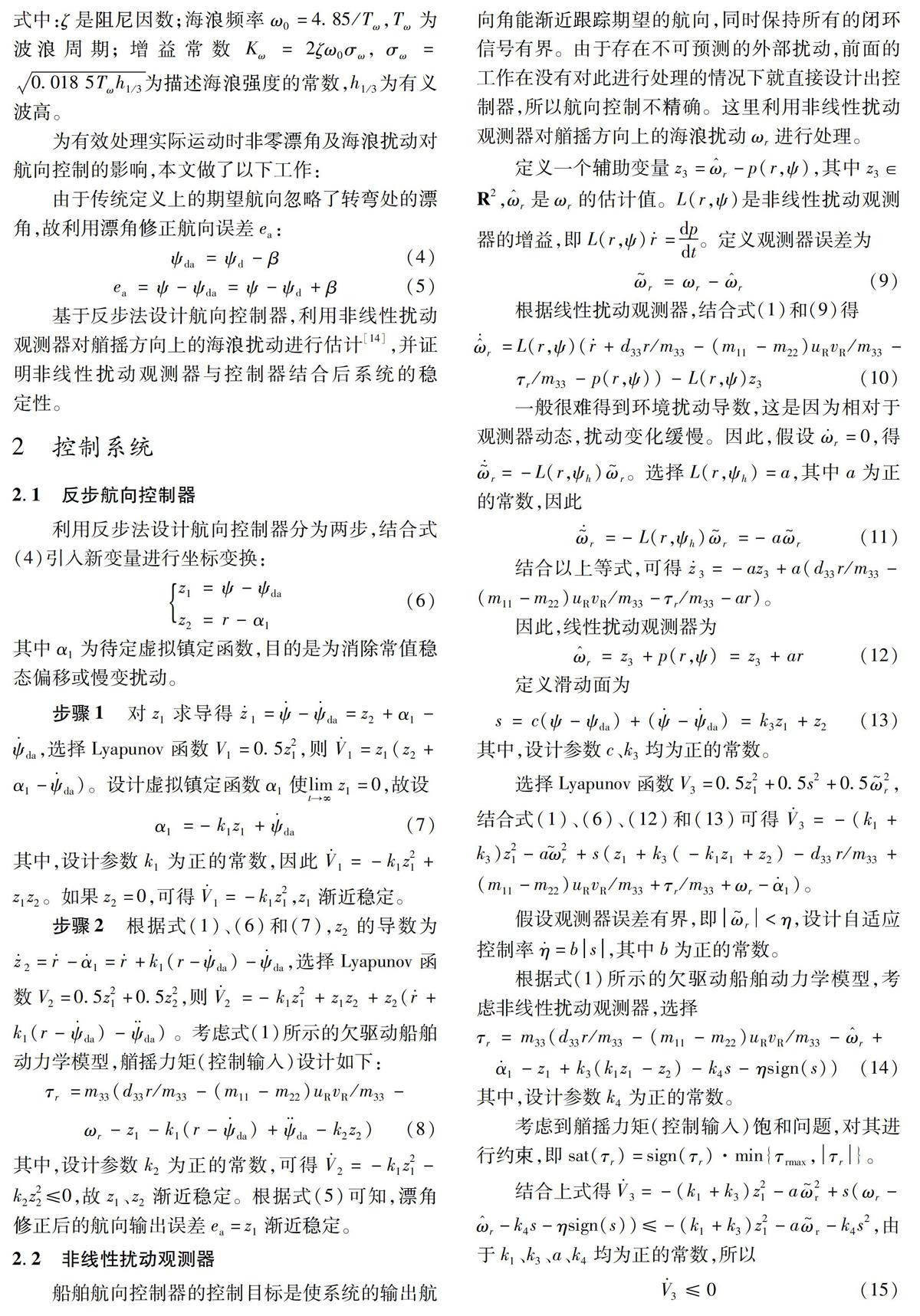
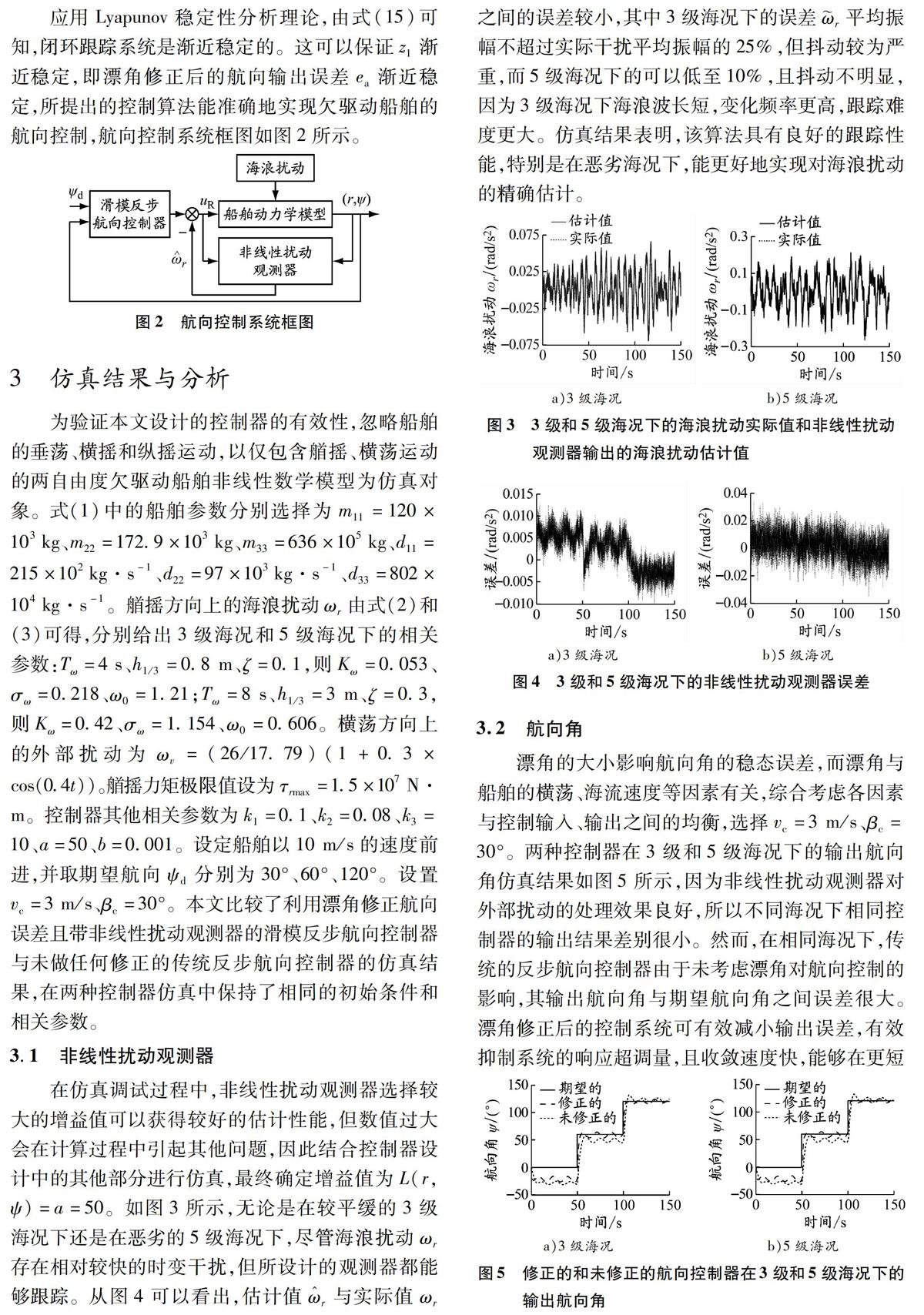
漂角的大小影響航向角的穩態誤差,而漂角與船舶的橫蕩、海流速度等因素有關,綜合考慮各因素與控制輸入、輸出之間的均衡,選擇vc=3 m/s、βc=30°。兩種控制器在3級和5級海況下的輸出航向角仿真結果如圖5所示,因為非線性擾動觀測器對外部擾動的處理效果良好,所以不同海況下相同控制器的輸出結果差別很小。然而,在相同海況下,傳統的反步航向控制器由于未考慮漂角對航向控制的影響,其輸出航向角與期望航向角之間誤差很大。漂角修正后的控制系統可有效減小輸出誤差,有效抑制系統的響應超調量,且收斂速度快,能夠在更短的時間內達到穩定,船舶航向控制效果得到了改善。結果表明,修正后的航向控制器明顯優于傳統控制器。
3.3 艏搖力矩(控制輸入)
圖6給出了不同海況下艏搖力矩的仿真結果。對于同一控制器,海況越惡劣,艏搖力矩變化越劇烈。對于同一海況下的不同控制器,當航向角發生改變時,傳統控制器的控制輸入過大,考慮艏搖力矩飽和極限問題,修正后的控制器加入了約束。由于在計算漂角導數時會產生誤差,當航向角突變時,短時間內修正后的控制器的控制輸入比傳統控制器的稍大。在穩定狀態下,兩種航向控制器的控制輸入基本相同。
4 結束語
針對復雜海況下船舶航向運動的非線性特性和海浪擾動問題,基于漂角修正設計了一種反步航向控制器,并結合非線性擾動觀測器給出了一種魯棒自適應控制方法。通過理論推導和仿真可得出以下結論:
通過漂角對航向誤差進行了修正,應用反步控制算法設計出航向控制器,有效減小了非零漂角對航向的影響;利用非線性擾動觀測器對艏搖方向擾動進行了有效的估計處理,設計簡單,意義明確;利用Lyapunov理論證明了非線性擾動觀測器與控制器結合后閉環系統的穩定性;以包含艏搖、橫蕩運動的兩自由度欠驅動船舶模型為對象,進行了仿真研究。對比結果表明,提出的控制方法可有效減小航向輸出誤差,使系統在更短的時間內達到穩定,提高了欠驅動船舶航向控制效果。然而,本文為方便控制方法的設計,建模時簡化了船舶模型,在控制器設計中沒有考慮詳細的船舶非線性動態和系統參數的不確定性,且本文對艏搖力矩飽和問題僅進行了簡單的約束,如果擾動的幅度很大,則該約束很難被滿足,這些問題留待以后研究。
參考文獻:
[1] ZHANG Guoqing, DENG Yingjie, ZHANG Weidong. Robust neural path-following control for underactuated ships with the DVS obstacles avoidance guidance[J]. Ocean Engineering, 2017, 143: 198-208. DOI: 10.1016/j.oceaneng.2017.08.011.
[2] WANG Yuanyuan, CHAI Shuhong, KHAN F, et al. Unscented Kalman Filter trained neural networks based rudder roll stabilization system for ship in waves[J]. Applied Ocean Research, 2017, 68: 26-38. DOI: 10.1016/j.apor.2017.08.007.
[3] ZHANG Xianku, ZHANG Guoqing. Design of ship course-keeping autopilot using a sine function-based nonlinear feedback technique[J]. The Journal of Navigation, 2016, 69(2): 246-256. DOI: 10.1017/S0373463315000612.
[4] YIN Shen, YU Han, SHAHNAZI R, et al. Fuzzy adaptive tracking control of constrained nonlinear switched stochastic pure-feedback systems[J]. IEEE Transactions on Cybernetics, 2017, 47(3): 579-588. DOI: 10.1109/TCYB.2016.2521179.
[5] YIN Shen, SHI Peng, YANG Hongyan. Adaptive fuzzy control of strict-feedback nonlinear time-delay systems with unmodeled dynamics[J]. IEEE Transactions on Cybernetics, 2016, 46(8): 1926-1938. DOI: 10.1109/TCYB.2015.2457894.
[6] 張顯庫. 船舶航向保持的非線性逆推魯棒控制算法[J]. 大連海事大學學報, 2007, 33(2): 80-83.
[7] HU Yancai, PARK G K, HONG Taeho, et al. Fuzzy design for ship heading control using ACFB for e-Navigation[J]. International Journal of Fuzzy Logic and Intelligent Systems, 2017, 17(4): 272-278. DOI: 10.5391/IJFIS.2017.17.4.272.
[8] 彭秀艷, 胡忠輝. 帶有海浪濾波器的船舶航向反步自適應輸出反饋控制[J]. 控制理論與應用, 2013, 30(7): 863-868. DOI: 10.7641/CTA.2013.21104.
[9] 嚴路, 何漢林, 江梅. 基于自適應滑模抗飽和控制及其應用[J]. 華中科技大學學報(自然科學版), 2014, 42(7): 72-75.
[10] 袁雷, 吳漢松. 船舶航向控制的多滑模魯棒自適應設計[J]. 控制理論與應用, 2010, 27(12): 1617-1622.
[11] 朱齊丹, 周芳, 趙國良, 等. 基于反步法和滑模觀測器的船舶航向控制[J]. 華中科技大學學報(自然科學版), 2009, 37(4): 122-125.
[12] HU Chuan, WANG Rongrong, YAN Fengjun, et al. Robust composite nonlinear feedback path-following control for underactuated surface vessels with desired-heading amendment[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10): 6386-6394. DOI: 10.1109/TIE.2016.2573240.
[13] 張元濤, 石為人, 邱明伯. 基于非線性干擾觀測器的減搖鰭滑模反演控制[J]. 控制與決策, 2010, 25(8): 1255-1260.
[14] LIU Zhiquan. Ship adaptive course keeping control with nonlinear disturbance observer[J]. IEEE Access, 2017, 5: 17567-17575. DOI: 10.1109/ACCESS.2017.2742001.
(編輯 趙勉)