一種智能通信控制系統的設計與實現
2020-04-01 06:02:41施京何煦施佳趙久利
計算機與網絡 2020年22期
施京 何煦 施佳 趙久利
摘要:針對地面設備與空中快速移動機載設備之間的通信需求,提出了一種智能通信控制系統的構建方案,通過采用一種智能控制及防繞線算法,對伺服云臺及通信設備進行控制,達到快速、準確地調整通信設備天線方向,實現對移動目標快速自動化跟蹤,從而確保二者之間良好通信的目的。該系統的設計方法還可以推廣應用到其他安防、高速路監控等領域。
關鍵詞:智能通信控制;伺服云臺;防繞線;自動跟蹤;地面設備;機載設備
中圖分類號:TP273文獻標志碼:A文章編號:1008-1739(2020)22-62-5
0引言
隨著科學技術的不斷發展和各種工程應用需求的擴展,使用機載設備對地面進行監測的需求不斷增加,機載設備與地面設備之間的數據傳輸日漸頻繁,傳統的通信方式已難以保證二者之間遠距離通信。通常情況下機載設備使用全向天線與地面設備進行通信,而地面上有使用定向和全向天線2種模式。地面上使用定向天線雖然可以與機載設備進行較遠距離的通信,但是由于機載設備飛行速度快、活動范圍大,難以保證機載設備在地面通信設備的定向通信天線波束范圍內,導致雙方無法進行有效通信。如果地面通信設備使用全向天線時,由于全向天線增益低,當機載設備距離地面設備較遠時,又難以保證雙方之間遠距離的通信。如何構建一套地面設備與機載設備之間良好通信的智能通信控制系統就成為了急需解決的問題。
1系統設計
為了能夠實現地面與機載設備之間較遠距離的通信,主要解決的是二者之間通信天線角度實時匹配問題。機載設備存在移動速度快、方位變化大、需要接收各種信號的特點,一般選用的通信天線為全向天線。為了增加通信的距離,基本上從地面通信設備著手,地面通信設備選用定向天線,然后將通信設備(含通信定向天線)安裝到具備水平和俯仰方向轉動的伺服云臺上,通過計算機控制伺服云臺實時轉動,使通信定向天線始終自動對準機載設備的方向,這樣就可以達到較遠距離通信的目的。
在智能通信控制系統設計時,需要重點解決以下三大問題:
①解決地面設備如何實時跟蹤移動的機載設備,保持通信雙方遠距離良好通信的問題;
②解決限位模式云臺在部分位置轉動效率不高以及存在死角的問題;
③解決無限位云臺上面安裝設備的線纜在隨機控制的轉動過程中纏繞到云臺上會導致云臺損毀的問題。
智能通信控制系統的簡易模型可以由1臺筆記本電腦(含云臺智能控制軟件,也可以使用顯控臺計算機加顯示器替代)、1套伺服云臺設備、1個網絡轉RS485單元(可選一個RS232轉RS485單元)、1套GPS接收機(含天線)、1套地面通信設備(含定向天線)和1套機載通信設備(含全向天線)組成,如圖1所示。

系統使用交流220 V工作,通過各類電源適配器提供所需要的設備直流電源。系統支持RS232或網絡控制模式,當通過RS232接口控制云臺時,筆記本電腦需要有2個RS232接口,再加上RS232轉RS485單元;當通過網絡控制云臺時,筆記本電腦需要有1個RS232接口、一個網絡轉RS485單元。當系統工作在固定位置時,GPS接收機可以在讀取系統初始位置信息后,不再連接,用以解決串口不足時的應用。選用網絡接口的GPS接收機時,可以在系統上增加一個交換機來實現網絡的連接。筆記本或顯控臺沒有RS232接口時,也可以使用USB轉串口(RS232)的轉接線實現物理上的連接,這些都比較容易實現。
通過設計的系統控制軟件,可以在系統初始參數設置時,根據硬件的具體情況配置選擇云臺的控制模式(網絡或RS232)。采用網絡工作模式時,設備的部署更加靈活,筆記本電腦(顯控臺)可以部署在離通信設備較遠的位置。
系統具備全自動跟蹤機載設備能力。為了實現最大的通信距離,地面設備使用的是定向天線,由于直升機速度快,如果定向天線不能夠有效對準,將大大減少地空之間的通信距離。本系統通過地面設備的云臺控制實現自動跟蹤直升機的位置,從而大大提高了地面與空中的通信距離。同時,通過網絡方式遙控云臺工作,解決了原先串口控制方式中串口缺少、串口傳輸距離近的問題。通過軟件自動實現云臺轉動的角度范圍和轉動方向控制,解決了傳統的云臺限位帶來的在限位臨界位置到達需要位置速度慢和存在誤差較大導致跟蹤失敗的問題,解決了云臺上安裝設備線纜纏繞在云臺上導致云臺損毀的問題。
2系統工作原理
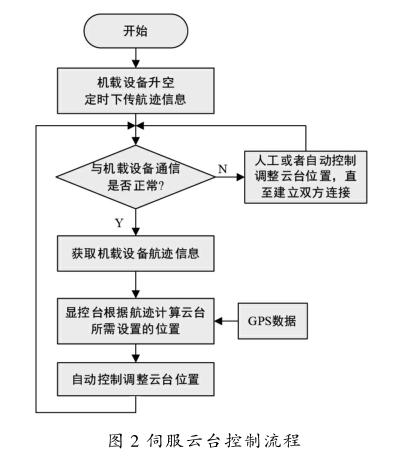
機載設備升空后,上面的設備可以定時下傳航跡信息,當地面設備(顯控臺或者通信設備)與機載設備通信正常時,會接收到下傳的航跡信息,從中可以獲取機載設備的經度、緯度和高度等信息;結合地面設備的位置信息(經度、緯度、海拔高度)計算出云臺需要轉動的方向(包括水平方向、俯仰方向),然后下發云臺控制指令,實現控制伺服云臺轉動到對準機載設備的方向,從而實現地面設備與機載設備保持良好的通信。伺服云臺控制流程圖如圖2所示。
3防繞線設計方法
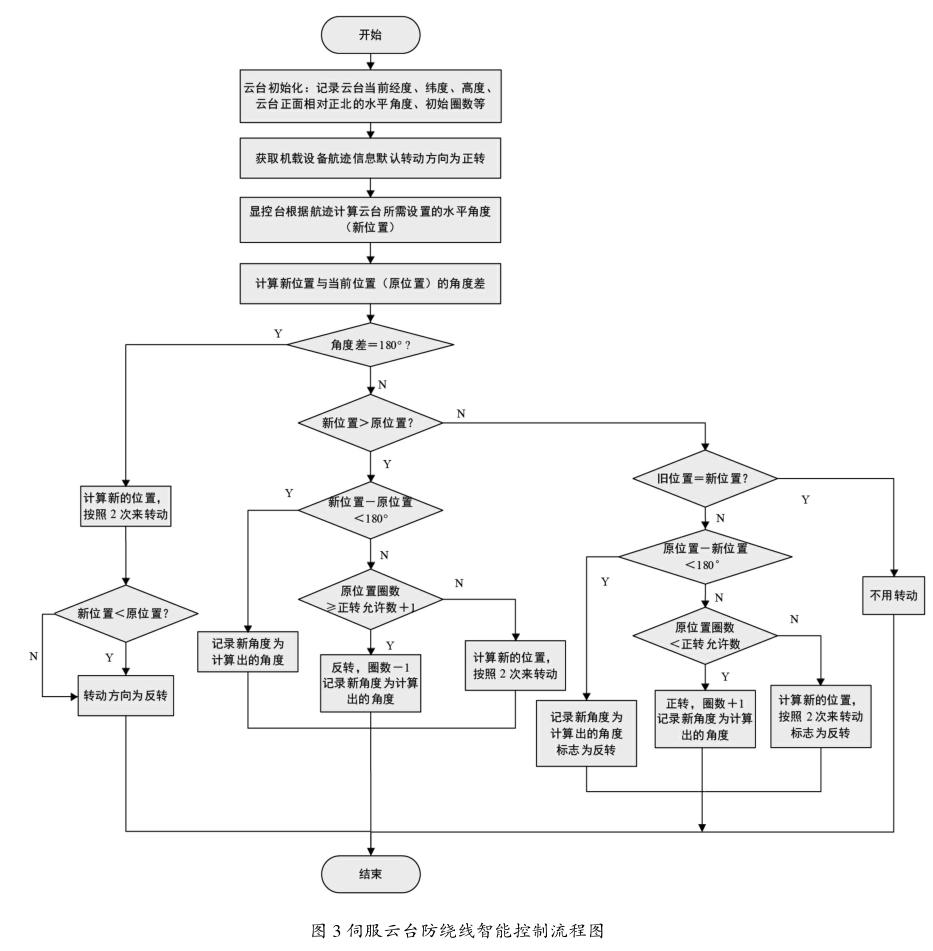
由于安裝在伺服云臺上面的通信設備(天線等)有相關的電纜(如射頻電纜、電源線等),在轉動過程中會纏繞到云臺旋轉體上,在達到一定的圈數后會引起云臺無法轉動,嚴重時會導致云臺內部的電機損毀。因此需要對云臺的控制范圍進行有效控制,使其在一定的范圍內轉動(此時不會引起繞線)。首先需要測試出伺服云臺順時針或逆時針水平轉動時不會引起繞線的總區間,將其中間位置設置成初始位置,其總圈數的一半(取整)即為可以正反轉動的圈數范圍。俯仰方向一般范圍不大,俯仰角度不大于90°,俯仰轉動時不會引起繞線問題。
為了能夠及時獲取云臺轉動和當前位置的信息,需要在顯控臺與云臺之間建立通信協議,通過軟件進行記錄云臺的轉動軌跡,然后根據云臺允許的轉動范圍,進行綜合計算得到需要轉動的方向和角度,通過與云臺之間約定的指令,控制云臺的轉動方向和角度,而不是讓云臺隨便轉動。根據云臺的轉動特點,在有些轉動角度,如180°左右時,考慮到機械誤差和云臺內部自動轉動機制判斷可能存在誤差,此時需要進行多次(一般軟件中取為2次)控制才能取得正確計數(圈數)和防繞線的效果。
伺服云臺防繞線智能控制流程圖如圖3所示。
4系統軟件設計
根據上述系統設計構想,智能通信控制系統的軟件設計主要包括網絡通信模塊、通信接口配置模塊、GPS信息接收模塊、信息處理顯示模塊、防繞線處理控制模塊、伺服云臺控制模塊。其中網絡通信模塊主要實現顯控臺與通信設備之間的網絡通信和數據交換。
通信接口配置模塊進行云臺控制參數設置,主要包括控制接口類型、串口設置、告警設置、速度控制等參數;控制接口類型分為網絡接口和RS232接口;RS232串口設置,包括波特率選擇:300/600/1 200/2 400/4 800/9 600/19 200 bit/s;數據位選擇:7/8位,停止位選擇:1/2位;校驗位選擇:無/奇校驗/偶校驗;串口選擇:COM1/COM2;告警設置:是否告警、是否發音、告警的水平角度和俯仰角度差值,其取值與安裝在云臺上的天線方向圖和波束角度相關,不能夠超過天線波束的范圍;速度控制:水平角度速度值、垂直角度速度值(需要云臺支持)。
GPS信息接收模塊自動獲取GPS接收機的本地位置信息,包括經度、緯度和高度,在沒有GPS設備時,還需要支持人工輸入模式;通過RS232接口連接GPS接收設備,自動獲取本地的位置信息;或者通過人工輸入模式,設置本地的位置信息,包括經度、緯度和高度的值。
信息處理顯示模塊包括對通過無線通信方式連接機載設備得到的機載設備位置信息的接收和顯示,主要包括:經度、緯度、高度、艏向角、橫滾角及飛行速度等。根據得到的機載設備位置信息,結合云臺伺服智能控制系統所在的位置信息進行計算和統計,可以得到二者之間的距離、相對方位、俯仰角度。根據設置的告警范圍,結合記憶的云臺之前運轉的相關位置及防繞線條件的限制值等,計算出水平方向的角度和俯仰方向的角度,以及需要云臺轉動的方向。同時在控制界面上實時顯示云臺轉動的情況,新的天線方向圖信息、范圍信息,機載設備相關位置信息等內容,其中云臺控制的天線范圍可以設置和調整。
防繞線處理控制模塊實現根據實時獲取的機載設備位置信息和本地位置信息進行計算和統計,得到機載設備相對位置、云臺需要的轉動方向等信息;根據計算得到的水平角度和俯仰角度,調用通信控制模塊,下發指令對云臺實施控制,實時跟蹤機載設備的方向。
伺服云臺控制模塊主要實現對伺服云臺的水平方向轉動控制、垂直方向轉動控制,另外還可以增加一些快速定位功能,如初始位置設置、固定角度控制的功能,接收伺服云臺返回的轉動方向(需要有約定控制指令支持)、當前水平和垂直位置相關信息并發送給信息處理顯示模塊進行處理和顯示等。
能夠通過伺服云臺智能控制,確保地面通信設備與機載通信設備之間保持最佳的相關位置,從而確保二者之間的良好通信,進而輔助實現地面設備對機載設備的控制和進行信息交互。
智能通信控制系統的軟件操作控制界面設計實例如圖4所示,實現了包括伺服云臺智能通信控制的上述所有功能,支持地面設備對2個不同的機載設備的信息交互和通信控制。
圖4還是一個平面的極坐標示意圖。極坐標圖的左上角顯示名稱,名稱上面的指示燈表示顯控臺(計算機)與云臺的連接狀態,其中綠燈表示連接正常,不正常時指示燈為黑色。右上角顯示的是云臺控制的角度等信息,底部從左到右分別顯示鼠標在極坐標圖中移動時的位置、距離中心點距離、角度等信息,地面設備的經度、緯度、高度信息,2個機載設備的位置、高度、距離及角度等信息。
極坐標中心點指的是地面設備的位置,每個圈表示10 km的距離(具體距離可以通過配置進行調整)。黃色朝上的箭頭表示車頭的方向(云臺初始位置的指向與其相同)。一周表示0°~360°的范圍。N表示正北方向,E表示正東方向,S表示正南方向,W表示正西方向。為便于觀察判斷機載設備等目標方位,車頭方向不變(以向上表示),方向圖則根據車頭與正北方向的夾角變化而變化。
在極坐標圖下部左右兩邊,使用圖形和數字方式對機載設備的俯仰角、橫滾角進行了示意。圖4中的藍色區域是天線方向示意圖。在高級功能中,操作員可以另外選擇與通信天線相匹配的天線方向圖。定向天線作用方向示意圖還提供了三角扇形區域表示方法、橢圓區域、天線方向圖區域表示方法等。
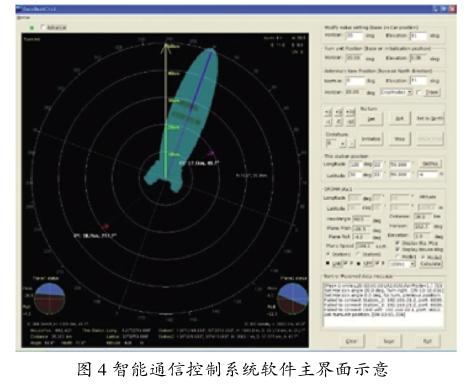
智能通信控制軟件適用于地面設備的顯控臺使用,通過對伺服云臺的控制,可以實現伺服云臺上面裝載的通信天線對準需要的方向,從而實現地面與空中目標之間的有效通信。本軟件可以安裝運行在任意一臺能夠運行Windows XP/Windows 7的計算機上。當需要對直連計算機的伺服云臺進行控制時,需要該計算機帶有一個RS232串口;當通過網絡方式連接云臺時,并且需要接收其他顯控臺的信息時,需要計算機提供網絡接口。此外,本軟件可以通過網絡接收約定格式的飛機航跡數據,并自動計算飛機的相對位置、方向角、距離等,同時進行標繪,顯示飛機相對于伺服云臺的當前大致位置、飛行方向、俯仰角、橫滾角等信息。操作員根據目標所處位置(方位),對伺服云臺(上面安裝通信天線)進行控制,從而確保地面站與飛機之間的穩定通信。
5結束語
本文提出了一種智能通信控制系統的設計方法,并給出了一種設計實例,同時介紹了應用場景。實際上,智能通信控制系統應用不僅僅局限于對機載設備通信配套。根據伺服云臺上面安裝設備的不同,可以實現不同的工作任務需求。本文通過在伺服云臺上安裝通信設備的定向通信天線實現了地面設備與機載設備之間遠距離的通信功能,當在云臺上安裝攝錄設備時,通過對云臺的智能控制可以實現不同時間對不同方向目標的攝錄;在云臺上安裝光電設備時,可以實現對不同方向目標的觀察、探測等。本文提供的設計方法可以運用于車載設備、固定站設備等的智能通信控制系統設計參考,具有很強的實用價值,應用前景廣闊。
參考文獻
[1]栗蘋,趙國慶,楊小牛,等.信息對抗技術[M].北京:清華大華出版社,2008.
[2]張筠莉,劉書智.Visual C++實踐與提高—串口通信與工程應用篇[M].北京:中國鐵道出版社,2005.
[3]嚴文.一種基于ARM的二自由度云臺伺服控制系統研究[D].武漢:武漢科技大學,2012.
[4]于彥春.車載伺服升降云臺系統研究[D].哈爾濱:哈爾濱工程大學,2011.
[5]羅偉,徐雪松,張煌軍.多旋翼無人機目標跟蹤系統設計[J].華東交通大學學報,2019,36(3):72-79.
[6]劉進進,吳輝,葉偉.基于攝像機云臺控制系統的應用研究[J].工業控制計算機,2019,32(4):127-128.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00