基于GO法的某型飛機電傳操縱桿系統余度研究
2020-04-01 08:14:44段富海,馬駿,張慕天,2
大連理工大學學報 2020年2期
段 富 海, 馬 駿, 張 慕 天,2
( 1.大連理工大學 機械工程學院, 遼寧 大連 116024;2.上汽集團股份有限公司商用車技術中心, 上海 200438 )
0 引 言
飛機電傳操縱系統是一種全時、全權限的飛行操縱系統,因具有操作精度高、體積小、戰場生存能力高、易與導航控制系統交聯等優點,已成為目前飛控系統的發展主流[1].
飛機電傳操縱桿系統是飛機電傳操縱系統的前端,其將飛行員的操縱愿望轉變為電信號形式的操縱指令信息.電傳操縱桿系統用電纜替代了鋼索、滑輪等機械元件,操縱系統的重量體積大大減小,節省了系統設計、安裝和調校時間.電傳信號消除了機械操縱系統中的摩擦、間隙和非線性因素,改善了精微操縱信號的傳遞.電氣組合簡單,易于實現操縱桿與自動駕駛儀的結合.一般采用小側桿操縱機構,可減輕飛行員工作負擔,同時飛行員觀察儀表的視線不再受傳統中央駕駛桿影響.電傳操縱桿系統依靠電信號傳遞指令,與控制增穩系統融為一體,飛機操穩特性得到根本改善[2-3].
飛機電傳操縱桿系統在飛行員操控飛機飛行姿態和控制飛機按既定航道飛行等方面起著至關重要作用,其性能好壞對飛機飛行品質有著重要影響[4].因此,電傳操縱桿系統可靠性和安全性備受飛機研制方和使用方的重視,是飛機系統可靠性設計的核心內容[5].目前,國際上對電傳操縱系統可靠性指標要求通常為民用飛機每飛行小時1.0×10-10~1.0×10-9.按照目前技術水平,僅通過單套電傳操縱系統達到系統可靠性指標要求具有很大難度.一般來說,單通道電傳操縱系統只能夠做到每飛行小時(1~2)×10-3,與傳統機械操縱系統的可靠性指標差距較大[6-7].為達到國際通用的指標要求,使電傳操縱系統可靠性超越傳統機械操縱系統,在設計開發飛機操縱系統時普遍采用余度設計[8-9],即引入多重系統.現代飛機基本余度等級,以四余度和具有自監控能力的三余度方案最為常見,二者均可以實現雙故障工作,其故障率均可降到每飛行小時1.0×10-9.但目前自監控能力有待改善,所以民航飛機上首選按比較監控的方式進行監控的四余度方案.
GO法是美國軍方20世紀60年代首先提出,用于分析武器系統可靠性的一種有效方法,特別適用于有電流、氣流、液流等實際物流產生的多狀態復雜系統可靠性分析[10].GO法用GO操作符和信號流描述系統,依據其狀態概率組合法或概率公式法進行系統可靠度概率計算并定性定量分析[11],得到廣泛應用和發展,且功能逐漸完善,使用更加簡捷[12-13].
余度技術在航空領域應用廣泛,是提高系統可靠性、安全性的有效措施[14-16].余度技術一般通過并聯方式,增加可靠性較低組件數目,組成高可靠性系統,從而降低系統故障層級[17].然而系統余度過大,會造成系統組件數目過多,使得系統結構過于復雜,導致重量、經濟性等方面不能達到理想水平.通過GO法定量分析飛機電傳操縱桿系統可靠性,提出最佳余度配置方案并在電傳操縱桿系統中對關鍵組件采用余度設計,既能提高電傳操縱桿系統的可靠性又可以降低成本,提高整個飛機的可靠性.
1 電傳操縱桿系統結構原理
電傳操縱桿系統(圖1)主要由監控計算機、控制執行裝置和側桿手柄3部分組成.控制執行裝置主要由力矩電機、傳動齒輪、行星減速器、旋轉式電位器、力傳感器和各種電路模塊組成.其中力矩電機主要作用是驅動側桿手柄旋轉并為側桿手柄提供反饋力.因主動側桿機架設計尺寸較小,而小體積的力矩電機所提供的桿力一般較小,不能滿足設計要求,因此需要與行星減速器連接以便增大加載機構的力矩.霍爾電流傳感器主要作用是測量力矩電機的電流,然后將結果輸入微控制器.編碼器與力矩電機的輸出軸連接,主要作用是將力矩電機的角位移信號轉換為電信號,并將結果輸入微控制器,從而得到側桿的角速度.旋轉式電位器通過駕駛桿和側桿手柄相連,用于測量飛機駕駛員操縱駕駛桿時手柄的偏轉角度.力傳感器和駕駛桿相連,用于測量飛機駕駛員操縱駕駛桿時力的大小.PWM電機驅動模塊主要作用是接收微控制器的控制信號并進行放大,從而驅動力矩電機運轉.微控制器主要作用是接收反饋的手柄力信號、手柄角位移信號、手柄速度信號、霍爾電流傳感器電流信號,通過相關算法進行處理,得出預期的電機轉速和轉矩大小,然后輸出控制電流實現對側桿手柄的反饋控制.
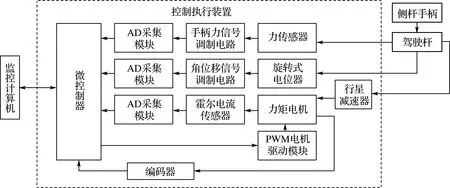
圖1 某型飛機電傳操縱桿系統原理圖
2 電傳操縱桿系統組件余度分析設計方法
2.1 電傳操縱桿系統的GO圖建模
令電機模塊余度為M1,編碼器模塊余度為M2,電流檢測模塊余度為M3,減速器模塊余度為M4,位移檢測模塊余度為M5,力感模塊余度為M6,微控制器模塊余度為M7.按照GO法中GO圖的構建規則,得到余度電傳操縱桿系統的GO圖,如圖2所示.
圖2中,操作符12、13分別和操作符14、15構成電機模塊;操作符18、19分別和操作符20、21構成電流檢測模塊;操作符24、25分別和操作符26、27以及操作符28、29構成位移檢測模塊;操作符30、31分別和操作符32、33以及操作符34、35構成力感模塊.可將各模塊的可靠性數據計算出后,用一個操作符進行替代,從而對余度電傳操縱桿系統進行簡化,以便更好地進行后續分析,簡化后余度電傳操縱桿系統GO圖如圖3所示.
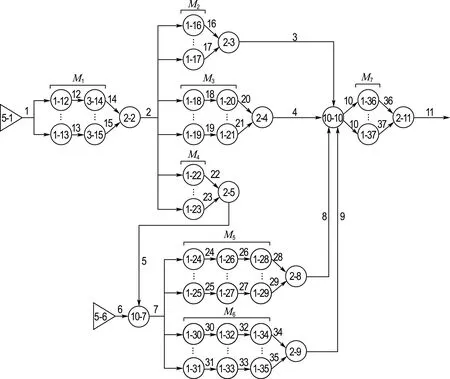
圖2 某型飛機電傳操縱桿系統余度GO圖
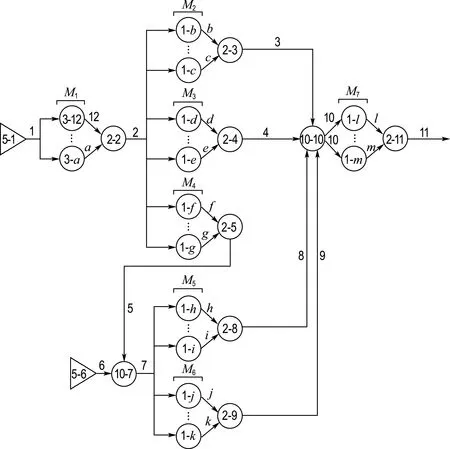
圖3 某型飛機電傳操縱桿系統雙余度簡化GO圖
根據現有文獻、工程經驗和專家知識[18-19],表1給出了電傳操縱桿系統各模塊的狀態概率,其中狀態值0、狀態值1和狀態值2分別為各模塊的提前狀態、工作狀態和故障狀態;P0、P1分別為各個模塊提前狀態概率和工作狀態概率.
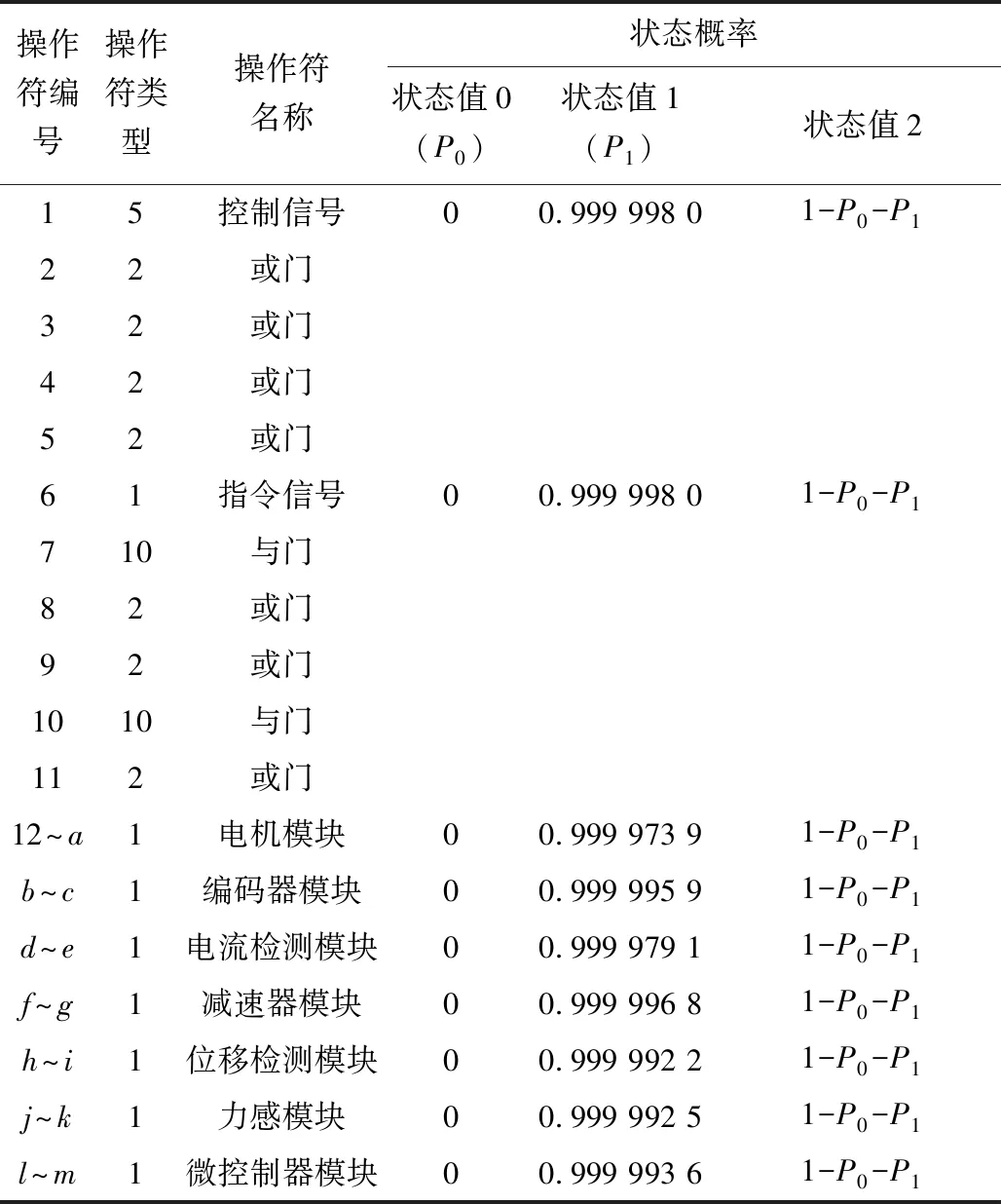
表1 某型飛機電傳操縱桿系統各模塊可靠度值
2.2 電傳操縱桿系統GO運算
運用狀態累積概率算法進行GO運算,根據電傳操縱系統的信號流流向依次對各關鍵信號流進行可靠性計算.
(1)信號流12~a
操作符12~a是觸發發生器操作符,其概率分布都相同,因此僅計算信號流a,計算公式為
Ara(0)=Pca(0)+Asa(0)Pca(1)=Xa-0
(1)
Ara(1)=Pca(0)+Asa(1)Pca(1)=
Xa-0+X1-1Xa-1
(2)
Pra(0)=Ara(0)=Xa-0
(3)
Pra(1)=Ara(1)-Ara(0)=X1-1Xa-1
(4)
(2)包含余度參數的信號流2
操作符2是或門邏輯操作符,共有M1個輸入信號,共有信號為信號流1,計算公式為
1-(1-Xa-0)M1
(5)
1-[1-As2(1)Xa-1]M1
(6)
對其進行共有信號修正可得:
Ar2(0)=1-(1-Xa-0)M1
(7)
Ar2(1)=1-(1-Xa-0)M1+
(8)
Pr2(0)=Ar2(0)=1-(1-Xa-0)M1
(9)
Pr2(1)=Ar2(1)-Ar2(0)=
(10)
(3)信號流b~c
操作符b~c是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流b,計算公式為
Arb(0)=Asb(0)Pcb(1)=
Xb-1-(1-Xa-0)M1Xb-1
(11)
Arb(1)=Asb(1)Pcb(1)=
Xb-1-(1-Xa-0)M1Xb-1+
(12)
Prb(0)=Arb(0)=Xb-1-(1-Xa-0)M1Xb-1
(13)
Prb(1)=Arb(1)-Arb(0)=
(14)
(4)包含余度參數的信號流3
操作符3是或門邏輯操作符,共有M2個輸入信號,共有信號為信號流2,計算公式為
1-[1-Xb-1+(1-Xa-0)M1Xb-1]M2
(15)
1-[1-Ar2(1)Xb-1]M2
(16)
對其進行共有信號修正可得:
(17)
(18)
Pr3(0)=Ar3(0)=
(19)
Pr3(1)=Ar3(1)-Ar3(0)=
(20)
(5)信號流d~e
操作符d~e是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流d,計算公式為
Ard(0)=Asd(0)Pcd(1)=
Xd-1-(1-Xa-0)M1Xd-1
(21)
Ard(1)=Asd(1)Pcd(1)=
Xd-1-(1-Xa-0)M1Xd-1+
(22)
Prd(0)=Ard(0)=Xd-1-(1-Xa-0)M1Xd-1
(23)
Prd(1)=Ard(1)-Ard(0)=
(24)
(6)包含余度參數的信號流4
操作符4是或門邏輯操作符,共有M3個輸入信號,共有信號為信號流2,計算公式為
1-[1-Xd-1+(1-Xa-0)M1Xd-1]M3
(25)
1-[1-Ar2(1)Xd-1]M3
(26)
對其進行共有信號修正可得:
(27)
(28)
(29)
Pr4(1)=Ar4(1)-Ar4(0)=
(30)
(7)信號流f~g
操作符f~g是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流f,計算公式為
Arf(0)=Asf(0)Pcf(1)=
Xf-1-(1-Xa-0)M1Xf-1
(31)
Arf(1)=Asf(1)Pcf(1)=
Xf-1-(1-Xa-0)M1Xf-1+
(32)
Prf(0)=Arf(0)=Xf-1-(1-Xa-0)M1Xf-1
(33)
Prf(1)=Arf(1)-Arf(0)=
(34)
(8)包含余度參數的信號流5
操作符5是或門邏輯操作符,共有M4個輸入信號,共有信號為信號流2,計算公式為

1-[1-Xf-1+(1-Xa-0)M1Xf-1]M4
(35)
1-[1-Ar2(1)Xf-1]M4
(36)
對其進行共有信號修正可得:
(37)
(38)
Pr5(0)=Ar5(0)=
(39)
Pr5(1)=Ar5(1)-Ar5(0)=
(40)
(9)包含余度參數的信號流7
操作符7是與門邏輯操作符,共有2個輸入信號,計算公式為
Ar7(0)=Ar5(0)Ar6(0)=0
(41)
Ar7(1)=Ar5(1)Ar6(1)=
(42)
Pr7(0)=Ar7(0)=0
(43)
Pr7(1)=Ar7(1)-Ar7(0)=
(44)
(10)信號流h~i
操作符h~i是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流h,計算公式為
Arh(0)=Ash(0)Pch(1)=0
(45)
Arh(1)=Ash(1)Pch(1)=
[1-(1-Xa-0)M1]×
(46)
Prh(0)=Arh(0)=0
(47)
Prh(1)=Arh(1)-Arh(0)=
[1-(1-Xa-0)M1]×
(48)
(11)包含余度參數的信號流8
操作符8是或門邏輯操作符,共有M5個輸入信號,共有信號為信號流7,計算公式為
(49)
(50)
對其進行共有信號修正可得:
Ar8(0)=0
(51)
Ar8(1)=[1-(1-Xa-0)M1]×
(52)
Pr8(0)=Ar8(0)=0
(53)
Pr8(1)=Ar8(1)-Ar8(0)=
[1-(1-Xa-0)M1]×
(54)
(12)信號流j~k
操作符j~k是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流j,計算公式為
Arj(0)=Asj(0)Pcj(1)=0
(55)
Arj(1)=Asj(1)Pcj(1)=
[1-(1-Xa-0)M1]×
(56)
Prj(0)=Arj(0)=0
(57)
Prj(1)=Arj(1)-Arj(0)=
[1-(1-Xa-0)M1]×
(58)
(13)包含余度參數的信號流9
操作符9是或門邏輯操作符,共有M6個輸入信號,共有信號為信號流7,計算公式為
(59)
(60)
對其進行共有信號修正可得:
Ar9(0)=0
(61)
Ar9(1)=[1-(1-Xa-0)M1]×
(62)
Pr9(0)=Ar9(0)=0
(63)
Pr9(1)=Ar9(1)-Ar9(0)=
[1-(1-Xa-0)M1]×
(64)
(14)包含余度參數的信號流10
操作符10是與門邏輯操作符,共有4個輸入信號,共有信號為信號流2和信號流7,計算公式為
Ar10(0)=Ar3(0)Ar4(0)Ar8(0)Ar9(0)=0
(65)
Ar10(1)=Ar3(1)Ar4(1)Ar8(1)Ar9(1)=
{[1-(1-Xa-0)M1]×
{[1-(1-Xa-0)M1]×
{[1-(1-Xa-0)M1]+
(66)
對其進行共有信號修正可得:
Ar10(0)=0
(67)
Ar10(1)={[1-(1-Xa-0)M1]+
(68)
(15)信號流l~m
操作符l~m是兩狀態單元操作符,其概率分布都相同,因此僅計算信號流l,計算公式為
Arl(0)=Asl(0)Pcl(1)=0
(69)
Arl(1)=Asl(1)Pcl(1)=
{[1-(1-Xa-0)M1]+X1-1×
(70)
Prl(0)=Arl(0)=0
(71)
Prl(1)=Arl(1)-Arl(0)=
{[1-(1-Xa-0)M1]+
(72)
(16)包含余度參數的信號流11
操作符11是或門邏輯操作符,共有M7個輸入信號,共有信號為信號流10,計算公式為
(73)
(74)
對其進行共有信號修正可得:
Ar11(0)=0
(75)
Ar11(1)={[1-(1-Xa-0)M1]+
(76)
式中:Arw(t)為信號流w輸出狀態為t時的狀態累積概率;Asw(t)為信號流w輸入狀態為t時的狀態累積概率;Prw(t)為信號流w輸出狀態為t時的狀態概率;Psw(t)為信號流w輸入狀態為t時的狀態概率;Pcw(t)為信號流w操作符狀態為t時的概率;Xv-t為操作符v狀態為t時的概率.
2.3 電傳操縱桿系統組件余度設計方法
信號流11是電傳操縱桿系統的輸出信號,可以通過對信號流11進行可靠性分析,從而進行余度設計.
通過式(76)分別對各余度變量求一階和二階導數.對M1求一階和二階導數,得:
X1-1[(1-Xa-0)M1ln(1-Xa-0)-
(77)
X1-1[(1-Xa-0)M1ln2(1-Xa-0)-
(78)
通過運用Matlab分析可知,M1的一階導數恒大于0,M1的二階導數恒小于0.
對M2求一階和二階導數,得:
{[1-(1-Xa-0)M1]+X1-1×
(79)
{[1-(1-Xa-0)M1]+X1-1×
(80)
通過運用Matlab分析可知,各組件余度算式的一階導數恒大于0,因此系統輸出的可靠度與系統各組件余度成正比.又因為它們的二階導數均小于0,因此系統輸出可靠度的增長幅值與系統各組件余度成反比.故通過分析電傳操縱桿系統可靠度的增長幅值,可以得出一個較優的余度設計結果,余度高于該設計的可靠性結果對電傳操縱桿系統可靠度優化貢獻較小,不予采納.
3 設計算例與結果分析
3.1 設計算例
設飛機電傳操縱桿系統7個余度變量參數的初值為1,計算得到可靠度函數為f(1,1,1,1,1,1,1)=0.999 935 001 769 910;然后按照循環算法將7個變量值依次增加1,求出每個可靠度與比較初值的差值,即每個可靠度增長幅值.將可靠度增長幅值中的最大值提取出來,作為下次運算的初值,如f(1,1,2,1,1,1,1)=0.999 955 900 411 450;依次循環計算,直到增長幅值小于1.0×10-9結束,詳細計算過程如表2所示.
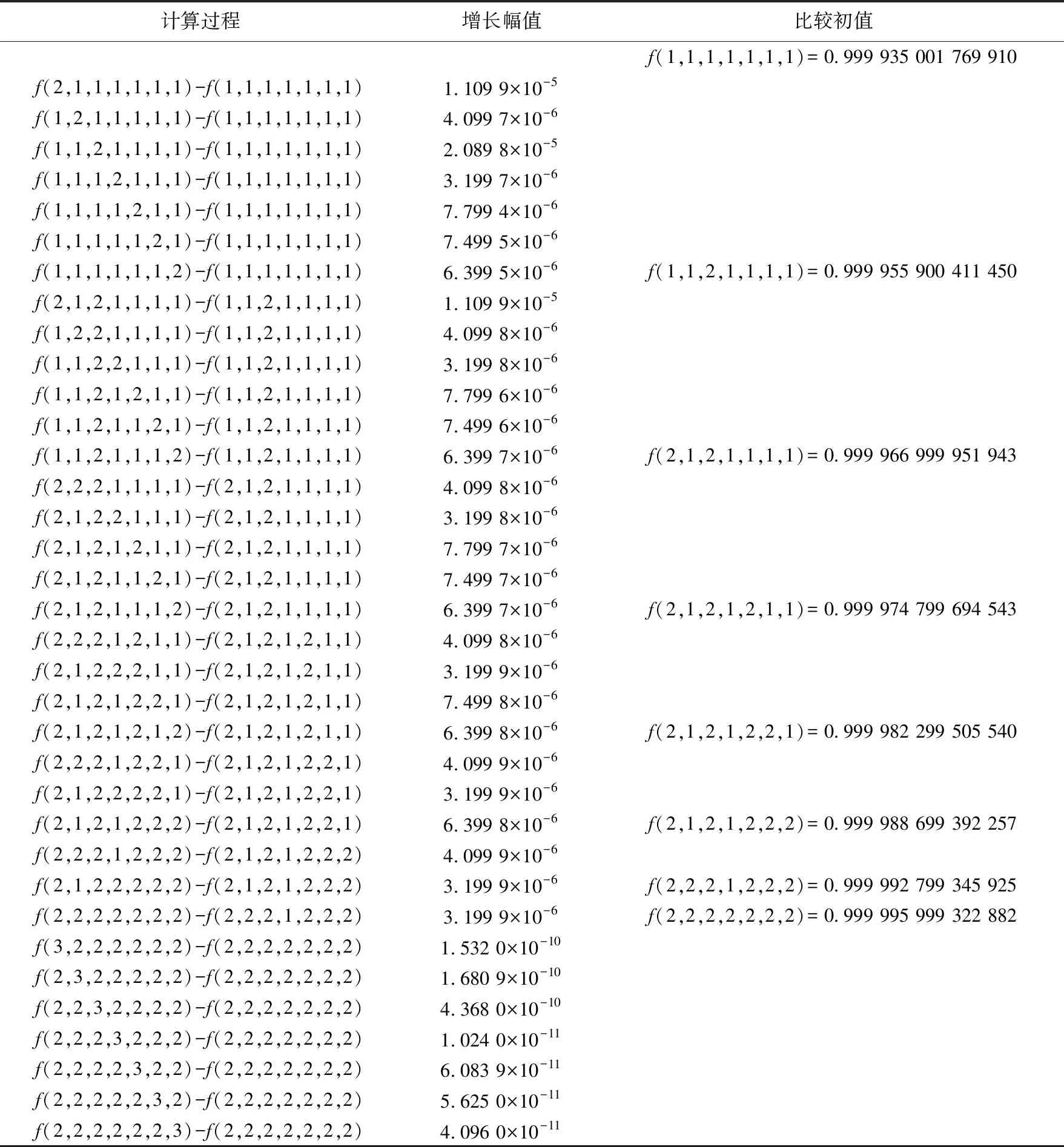
表2 可靠度增長幅值
3.2 結果分析
飛機電傳操縱桿系統復雜度高,其可靠性余度設計方法也相應復雜,但從上述計算分析過程可知,基于GO法的余度設計方法計算過程簡便,能較快得出余度設計參數.由表2可知,電傳操縱桿系統組件余度越大,其可靠度越高,當計算到f(2,2,2,2,2,2,2)=0.999 995 999 322 882作為初值時,電傳操縱桿系統組件余度的變量值繼續增大,但該組件余度下的可靠度較f(2,2,2,2,2,2,2)的增長幅值均小于1.0×10-9,若再提高電傳操縱桿系統組件余度,對其可靠度提高貢獻不大.所以電傳操縱桿系統組件最佳余度組合應為M1=M2=M3=M4=M5=M6=M7=2,即電機模塊、編碼器模塊、電流檢測模塊、減速器模塊、位移檢測模塊、力感模塊、微控制器模塊均采用雙余度設計,此時得到雙余度電傳操縱桿系統的可靠度為0.999 995 999 322 882.
4 結 論
(1)針對復雜的飛機電傳操縱桿系統,基于GO法的余度設計方法是有效的,且計算過程簡便,能較快得出余度設計參數.
(2)對某型飛機電傳操縱桿系統進行了組件余度設計,可以在最小的組件余度下保證較好的可靠度,在目前元器件可靠性水平下,可使單個電傳操縱桿系統可靠度達到每飛行小時1.0×10-6,能夠提高電傳操縱桿系統可靠性,為電傳操縱桿系統結構設計提供了參考.
(3)飛機電傳操縱系統采用兩套余度電傳操縱桿系統即可滿足一般飛機每飛行小時1.0×10-9可靠度要求.在余度較小的情況下,簡化了連接關系,減小了系統重量,提高了系統可靠性、安全性,對飛機電傳操縱系統設計有一定的指導意義.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
