淺談海洋平臺液位遙測系統
2020-03-31 12:22:28馮相閣
廣東造船 2020年6期
馮相閣

摘 ? ?要:液位遙測系統是海洋平臺重要的監控系統之一。本文就海洋平臺液位遙測系統的設置進行了闡述,包括液位遙測系統的組成、液位信號采集單元的種類以及液位遙測系統各類傳感器選擇和安裝建議等。
關鍵詞:海洋平臺;液位遙測系統;傳感器;液位采集單元種類
中圖分類號:TM938.6;P752?? ? ? ? ? ? ? ? ?文獻標識碼:A
Abstract: The tank gauging system is one of the important monitoring systems on the offshore platform. This paper describes the tank gauging system of the offshore platform, including the composition of the system, the types of liquid level signal acquisition units and the selection and installation suggestions of various sensors in the tank gauging system.
Key words: Offshore platform; Tank gauging system; Sensor; ?Type of Liquid level Acquisition unit
1 ? ? 前言
海上移動平臺(自升式平臺、半潛式平臺等)通常設置有壓載水艙、淡水艙、燃油艙、滑油艙、污水艙、污油艙等多個不同類型的液體艙室。考慮平臺壓載、調平、補給等多種作業的需求,平臺作業人員需要實時了解每個液體艙室的液位,設置液位遙測系統對每個液體艙室的液位進行檢測;對檢測的數據進行處理和計算后,將結果在液位顯示單元進行顯示;然后平臺作業人員根據各艙室的液位信息及平臺的作業需要,對相關系統的閥門及泵組進行自動或手動控制,實現對平臺的管理、調平以及配載等作業,保證海洋平臺的安全及提高管理效率。本文主要闡述了海洋平臺液位遙測系統的種類、選型以及安裝方面的建議,為后期項目的設計和安裝提供參考。
2 ? ?液位遙測系統的組成
液位遙測系統是海洋平臺上監控系統中的重要組成部分,它既能大大提高平臺作業人員的便利性,又直接關系到海洋平臺在漂浮、壓載及作業期間的安全。
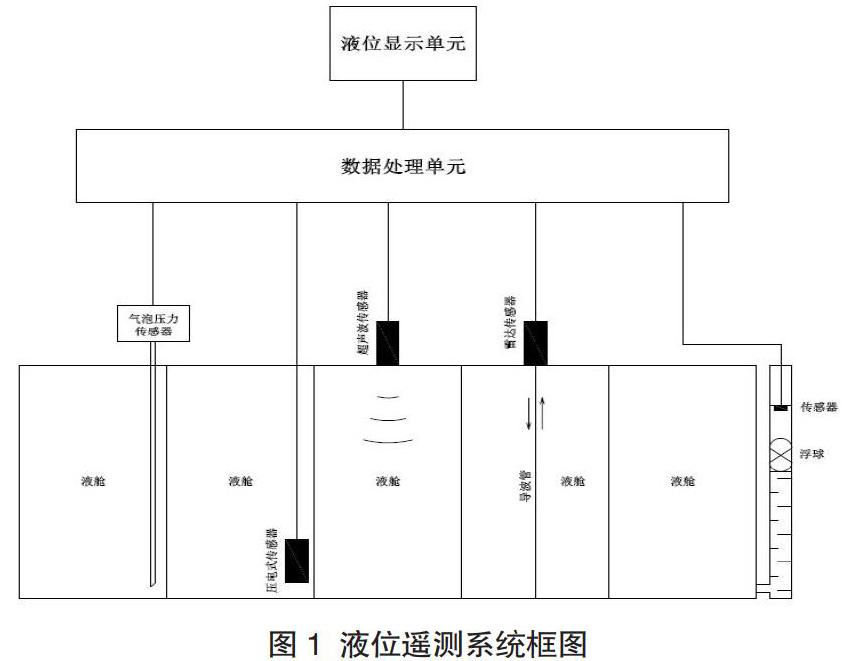
海洋平臺液位遙測系統,主要包括液位信息采集單元、數據處理單元以及液位顯示及操作單元:液位信息采集單元,監測海洋平臺的液體艙室的液位信息,將信息轉換成可識別的信號上傳給數據處理單元;數據處理單元進一步對液位信息進行數據分析和計算處理;然后將各艙室正確的液位信息數值,送至顯示單元進行顯示。液位遙測系統框圖,如圖1所示。
2.1 ? 液位信息采集單元
液位信息采集單元的傳感器分布在每個需要液位監測的液體艙室,傳感器對采集的液位信息進行分析處理后轉換為4~20 mA的模擬量信號。
液位信息采集單元根據液位信息采集原理的不同,可分為以下幾類:氣泡式;壓電式;浮子式;雷達式;超聲波式等。
2.1.1 吹泡式采集單元
氣泡式采集單元是以壓縮空氣作為測量介質,通過氣壓調節裝置經測深管將一定壓力和流量的壓縮空氣送至被測液體艙室內接近艙底的位置;當壓縮空氣的氣壓與測深管出氣位置液體介質的靜壓力相平衡后,多余的氣壓從測深管的底端以氣泡的形式溢出,測深管內的平衡氣壓即為液體介質在測深管底端的靜壓力。該壓力與液體艙室內液位的深度成正比,可通過設置在氣體閥箱內的壓力傳感器實時測量。按公式H=P/(ρg),根據傳感器測得的壓力參數即可獲得液位深度的準確數據。
這種測量方式的好處是壓力傳感器的感壓膜片不與被測液體直接接觸,減少了被測液體或海生物對傳感器的影響,同時不受液體艙室內不同結構形式及附件的干擾。氣泡式液位遙測系統原理圖,如圖2所示。
2.1.2 壓電式采集單元
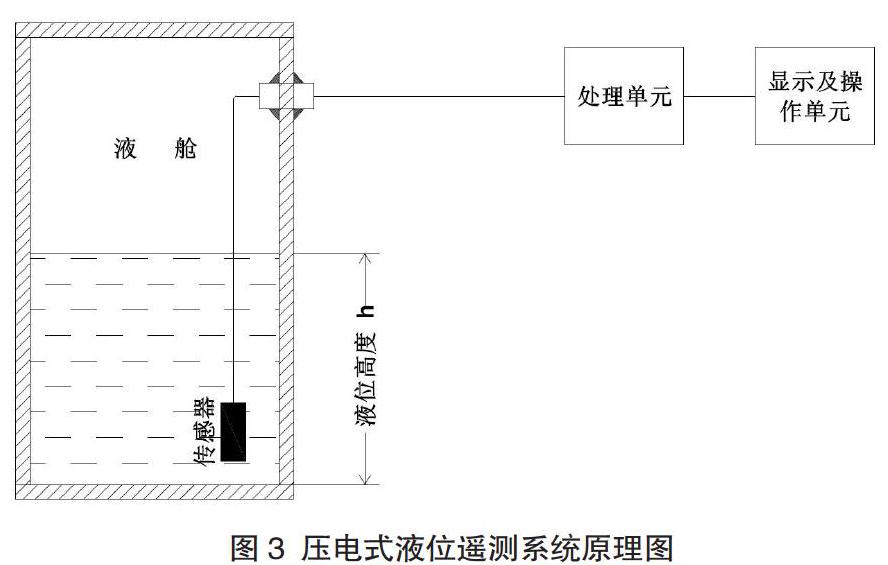
壓電式采集單元不同于氣泡式采集單元,它是將壓力傳感器直接設置在液體艙室的底部,能夠實時測量出液體艙室底部液體的靜壓力。同樣,該壓力與液體艙室內液位的深度成正比,按公式H=P/(ρg),根據傳感器測得的壓力參數即可獲得液位深度的準確數據。
這種測量方式相比于氣泡式采集單元,減少了壓縮空氣系統相關配件,系統簡單,也避免了氣體對液體艙室內液體造成污染的可能,測量方式也不受液體艙室內不同結構形式及附件的干擾。壓電式液位遙測系統原理圖,如圖3所示。
2.1.3 浮子式采集單元
浮子式采集單元,根據浮子所帶觸發器件的不同可分為兩種類型:一種是在浮子端部和微動組件上安裝一對極性相斥的磁鋼,浮子安裝在與液體艙室連通的腔體內,當浮子在動作界限內隨液位變化上下升降時,其所帶磁鋼也隨之上下浮動,并帶動微動組件上的磁鋼運動,微動組件位置的變化作為液位高度的判斷條件并能在顯示單元上進行顯示。浮子式(磁鋼)液位遙測系統原理圖,如圖4所示;另一種是在浮子端部安裝光敏器件,在動作界限內裝有光柵單元和微動開關組件,當浮子在動作界限內隨液位變化上下升降時,浮子端部的光敏器件也隨之上下擺動,當光敏器件通過光柵單元時,光柵單元產生信號,通過光柵單元信號的變化可判定液位的高度。浮子式(光敏元件)液位遙測系統原理圖,如圖5所示。
2.1.4 雷達式采集單元
雷達式采集單元,按照電磁波傳播方式不同可分為接觸式和非接觸式兩種。兩者的區別主要是非接觸式的電磁波沿空氣傳播,而接觸式的電磁波是沿著一根導波管傳播以消除雷達波束角。
雷達式采集單元的工作原理,是在液面上方(通常安裝在液體艙室的頂板上)安裝電磁波探頭(包括發射和接收兩個部分),發射模塊向液面方向發出電磁波,由于液體的介電常數與空氣的節點常數不同,當電磁波到達液面時會發生反射,被反射回去的部分電磁波被接收模塊接收,通過測出電磁波發出和接收的時間差計算出液面到探頭的距離,進而推算出液體艙室內液體的深度;雷達式采集單元的優點,主要是安裝簡單、精確度高、測量范圍大、測量結果不受液體溫度、密度、表面泡沫等參數影響、適用于大型船舶。導波雷達式液位遙測系統原理圖,如圖6所示。
2.1.5 超聲波式采集單元
超聲波采集單元的原理與雷達式采集單元的原理類似,也是由安裝在液面上方(通常安裝在液體艙室的頂板上)的超聲波探頭(包括發射和接收兩個部分)向液面方向發出超聲波,當超聲波到達不同介電常數的液面時發生部分反射并被接收模塊接收,通過測量的超聲波從發出到接收的時間差可計算出液面到探頭的距離,然后再根據探頭到艙室底部的高度即可推算出液體艙室內液體的深度;超聲波采集單元兼具雷達式采集單元的優勢,但由于超聲波的傳輸需要借助于傳輸媒介(多為空氣),所以不適用于真空環境。超聲波式液位遙測系統原理圖,如圖7所示。
2.2 ? 數據處理單元
數據處理單元控制柜通常布置在控制室內,主要包括電源模塊、控制器、輸入輸出模塊、通訊模塊等。數據處理單元的作用,主要是根據顯示及操作單元的指令對各個液體艙室的傳感器信號進行掃描,然后對信號采集單元輸送過來的4~20 mA信號進行數據分析和計算處理后返回給顯示及處理單元;數據處理單元也可以根據采集的數據信號對傳感器進行自檢,判斷送入顯示及操作單元的信號是否有效,如發現信號存在異常及時發出報警信號,確保系統運行正常及海洋平臺的安全。
2.3 ? 液位顯示及操作單元
液位顯示及操作單元通常布置在控制室內,方便值班人員及操作人員實時查看各個液體艙室的液位。液位顯示及操作單元可以簡單的理解為一臺計算機,包括電腦主機、顯示器(觸摸屏)、鍵盤、鼠標等,作為液位遙測系統的顯示終端,在顯示屏上可以實時顯示各個液體艙室的液位、重量、體積等參數。當任一個液體艙室的液位參數超出預先設定的報警值時立即發出報警信號,同時也可以通過鍵盤及鼠標等對液位采集單元的傳感器進行標定,以及對系統參數進行重新設定等。
3 ? ?液位遙測系統傳感器選擇和安裝
海洋平臺液位遙測系統根據采集原理,存在多個不同的采集方式。每種方式的傳感器都具有自身的特點和與之相適應的應用場所。為了盡量準確的測量液位信息,傳感器在安裝過程中需要注意下面一些問題:
(1)傳感器應能在特定的環境下穩定地工作,其量程范圍、靈敏度、精確度應與被測量液位參數的變化范圍及使用要求相適應;
(2)傳感器應與安裝位置的環境參數相適應,傳感器本身應具有良好的機械保護、可靠的電氣連接和良好的絕緣性能,特殊位置可考慮單獨設置機械保護;
(3)液位遙測系統的傳感器或吹氣管出口的位置,應盡量接近于液體艙室的艙底和中心位置,以便正確反映出被測液體艙室的液位;傳感器的安裝應易于接近、測試和維護;傳感器或吹氣管的位置,也應盡量靠近手動測深管,避免在傳感器校準時由于兩者位置偏差造成誤導;
(4)淡水艙內為生活用水,如采用氣泡式液位遙測系統在吹入壓縮空氣過程中可能會對生活用水造成污染,所以建議采用壓電式等其它類型的傳感器;
(5)對于氣泡式液位遙測系統,當某些深艙的最高液位可能高于吹氣管進入液體艙室的穿艙件高度時,應在吹氣管上設置單向閥,避免由于壓力差使得液體艙室內液體倒流造成氣源裝置損壞;
(6)壓電式傳感器應設置在液體艙室的底部,傳感器電纜處于液體艙室內的部分應穿管或其它機械保護,電纜管內壁須光滑并且耐腐蝕;如果傳感器布置在液體艙室的中心,通常將電纜保護管固定在艙壁上延伸到艙室底部后再通過水平電纜保護管延伸到艙室中心;
(7)如果使用過程中需要實際測得液體的密度,則應在液體艙室內設置高低兩個傳感器,底部傳感器用來測量液位高度,當艙內液位達到上部傳感器后通過上部和底部傳感器測得數據可計算出液體實際的密度;
(8)雷達式液位傳感器的安裝位置,應避免探頭所發出雷達波的扇形面被艙內結構附件遮擋后造成干擾;對于一些艙內設置有加熱盤管、攪拌器等設備的液體艙室,為了在液位測量過程不受加熱盤管、攪拌器等設備的影響,建議采用導波雷達的形式,導波管的位置盡量布置在艙室的中心;
(9)雷達式液位傳感器和超聲波液位傳感器,通常是布置在甲板面上,要求在設計和安裝過程中傳感器的防護防爆等級與安裝處所相適應;傳感器的位置應盡量躲開逃生路線、活動設備等區域;
(10)海洋平臺作業及航行期間,由于多種原因使得船體不能時刻處于水平狀態,而且很多艙室由于結構支撐、管線等其它結構物的影響使得液位傳感器也很難布置在液體艙室的中心,導致在平臺傾斜狀態下液位傳感器測得的液位并不能真實反應出液體艙室的液位,所以需要在平臺上設置四角或三角吃水測量系統,可測得平臺的傾斜角度,通過平臺的傾斜角度等參數對液位信息進行修正后,可獲得液體艙室的準確液位高度。
4 ? ?總結
本文介紹了海洋平臺上的液位遙測系統,對海洋平臺上液位遙測系統的種類、選型以及安裝過程,提出了幾點建議。希望本文中能對海洋平臺液位遙測系統的設計和安裝提供參考,以便設計人員選擇適合的傳感器對液體艙室的液位進行準確的監測,保證海洋平臺安全可靠的運行。
參考文獻
[1] 海洋石油工程設計指南編委會. 海洋石油工程FPSO與單點系泊? ? ? 系統設計[M]. 北京:石油工業出版社. 2009.
[2] 中國國家標準化管理委員會. 船用液位遙測系統 GB/T 37555. 2019. [S].
[3] 朱萬林 葉青松 鄧銳. 自升式鉆井船液位遙測系統設計[J]. 化學工程與? ? ?裝備. 2010 ( 6 ).
