爬樓輪椅前腿機構的可靠度靈敏度分析
2020-03-30 03:20:35張琦曹東興甘曉萌范柳彬
河北工業大學學報 2020年1期
張琦 曹東興 甘曉萌 范柳彬
摘要 針對爬樓輪椅的前腿機構,其運動精度的高低影響著爬樓輪椅整機的穩定性,運用封閉矢量法建立了前腿機構運動輸入、輸出模型,在同時考慮了桿件尺寸制造誤差和運動副間隙誤差的基礎上,建立了輪腿式爬樓輪椅前腿機構輸出角度可靠度、靈敏度模型,利用MATLAB編寫程序對建立的數學模型進行仿真分析,得出了機構在不同運動副間隙情況下可靠度的變化規律和其在不同參數下可靠性靈敏度的變化規律,為后期提高前腿機構的運動精度設計提供理論依據。
關 鍵 詞 爬樓輪椅前腿機構;尺寸制造誤差;運動副間隙誤差;可靠度;靈敏度
中圖分類號 TH789;TH112 ? ? 文獻標志碼 A
0 引言
前腿機構作為輪腿式爬樓輪椅的前部,在輪椅上下樓梯和跨越障礙上起著至關重要的作用,前腿機構能否正常工作直接影響到爬樓輪椅的正常使用,為確保前腿機構在工作中能夠按照要求達到預定的位姿,必須對其工作可靠性進行分析,由于在實際工作中,機構存在著尺寸加工誤差、運動副間隙誤差和輸入誤差等諸多因素都對機構運動精度可靠性有影響。國內外學者對此也進行了很多研究。例如文獻[1-2]分析了運動副間隙對機構可靠性的影響;文獻[3]對凸輪機構的運動精度仿真進行了分析;文獻[4-6]探討了曲柄滑塊機構可靠性與靈敏度。目前對于機構運動精度的可靠性理論,大都研究機構運動精度模型的仿真,并考慮部分影響因素對機構可靠性靈敏度的設計。
本文同時考慮前腿機構的基本尺寸誤差和運動副間隙誤差兩方面因素,將機構的運動精度模型與可靠性理論結合起來綜合進行考慮,進而建立了運動精度可靠性及可靠性靈敏度計算的數學模型。
1 前腿機構精度問題描述
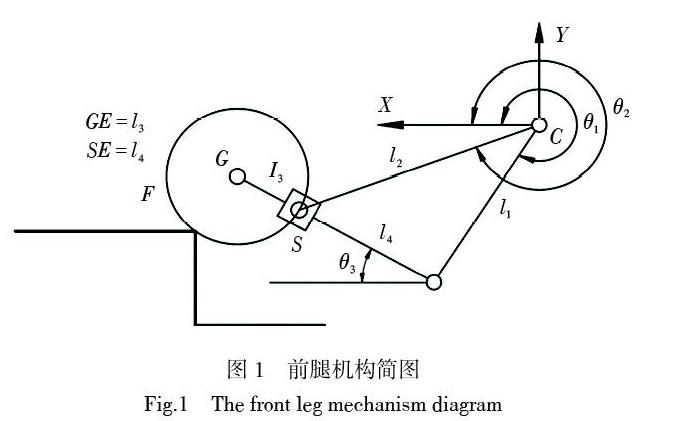
如圖1所示,前腿機構通過鉸鏈C與機架連接,桿l1和l2作為驅動桿,其中桿l1一端通過鉸鏈C與機架連接,另一端通過鉸鏈E與連桿l3連接;l2一端也是通過鉸鏈C與機架連接,另一端通過鉸鏈S與滑塊連接,前腿末端裝有F輪,通過鉸鏈G與連桿L3連接,以上鉸鏈均為轉動副。
根據設計,當驅動桿l1和l2給一定的輸入時,前腿機構的F輪和E輪會完成一定的動作,以輔助輪椅完成爬樓與越障等功能。但在實際工作中,在各個桿件加工誤差、運動副間隙誤差、輸入誤差等因素綜合影響下,前腿機構F輪會與理想的位姿出現一定的偏差,嚴重影響爬樓輪椅整機的穩定性。
2 基本尺寸誤差和運動副間隙對機構可靠度的影響
2.1 基本尺寸誤差對機構可靠性的影響
機構的基本尺寸誤差便是各桿件的幾何長度誤差,其主要來源于加工制造。本節便就連桿基本尺寸誤差對前腿機構可靠性進行分析,并建立數學模型。
圖1所示為輪腿式爬樓輪椅前腿機構簡圖,以輸出角θ3為研究對象,即輸出向量為Y = θ3,輸入向量為:X = [θ1,θ2],結構尺寸參數向量為:L = [l1,l2],由式(1)可求得前腿機構輸入和輸出的函數關系
2.2 運動副原始間隙誤差理論分析
運動副是由2個構件通過間隙配合而形成的活動聯接,所以運動副存在著的正常運動需要一定的運動副間隙,運動副過小會使機構運動不靈活,而運動副過大會使機構的運動精度大大降低,加大運動副的沖擊,增加構件的慣性應力和應變,除此之外由于機構裝配不合理、生產制造有誤差以及運動副長期磨損等也會造成機構運動副間隙存在誤差;過大的運動副間隙會使機構產生噪聲和機械效率降低,因此運動副間隙誤差的研究是非常必要的;如圖1所示輪腿式爬樓輪椅前腿機構存在著轉動副和移動副,下面分別對其進行分析。
2.2.1 轉動副間隙誤差模型分析
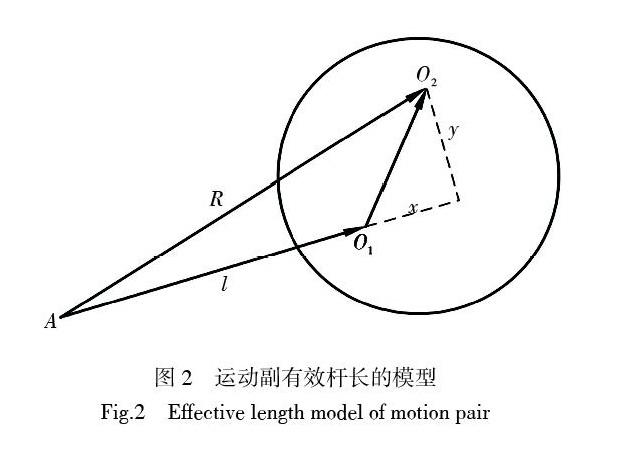
文獻[7]中提出了有效桿長的理論和誤差圓內鉸鏈的銷軸中心隨記分布的特點,并建立了可靠性分析的模型。由圖2所示的運動副有效桿長模型知有效桿長和實際桿長之間關系為
2.2.2 移動副間隙誤差模型分析
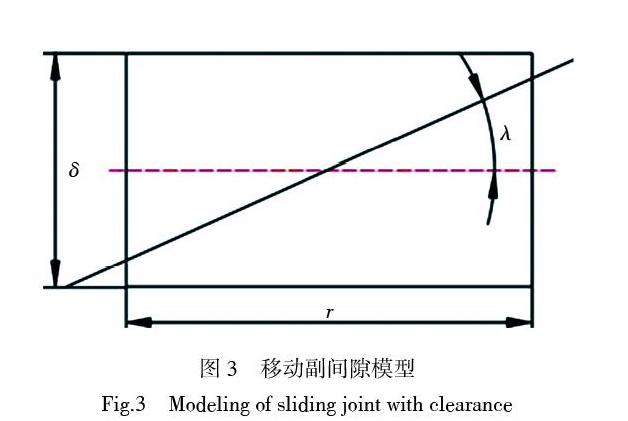
移動副約束著兩桿之間的夾角,如圖1所示由于其移動副間隙的存在,桿l3會繞著滑塊上的一點發生微小的轉動,導致機構的輸出角也會發生微小的改變。故建立如圖3所示的移動副間隙模型,r為滑塊的長度;d為桿l3的直徑大小;δ為移動副間隙大小;λ桿l3為繞滑塊轉動的微小偏轉角,則由幾何關系得
2.3 基本尺寸誤差和運動副間隙誤差對機構可靠性的共同影響
根據上述理論及其分析,基本尺寸誤差、運動副間隙誤差這2個因素都對機構運動精度產生一定的影響,下面結合基本尺寸誤差分析和運動副間隙誤差分析這2種理論,建立了同時考慮基本尺寸誤差、運動副間隙誤差這2種因素下的爬樓輪椅前腿機構運動精度可靠性及可靠性靈敏度的數學模型。其具體分析過程如下。
由式(6)可得,將考慮運動副間隙的有效桿長R替換實際桿長,則有
由式(8)可知前腿機構各個桿件考慮運動副間隙的有效長度和實際長度的均值相同,即E(Ri) = E(li),且由式(13)知在考慮移動副間隙誤差情況下也不會影響輸出角誤差的均值,因此,爬樓輪椅前腿機構同時考慮桿件制造尺寸誤差和運動副間隙誤差時機構輸出誤差的均值和只考慮桿件制造尺寸誤差的均值是一樣的。但此時的方差變為
經過上述分析可知,現可計算同時考慮機構基本誤差及運動副間隙誤差2種因素影響下的前腿機構運動精度可靠度數學模型,另外也可對其運動精度可靠性靈敏度進行計算分析。
3 建立前腿機構運動精度可靠性數學模型
3.1 機構運動精度可靠性函數的建立
機構的運動精度是決定其能否正常工作的重要指標之一,要想使一個機構能夠正常的工作,其輸出的誤差值必須滿足該機構運動精度的要求;由于各構件的尺寸誤差和運動副間隙都為隨機變量且符合正態分布,因此對于前腿機構輸出角度的可靠度R就是實際輸出角度誤差ε小于允許輸出角度誤差的概率,即
