基于計劃行為理論的防御性駕駛行為意向分析模型
2020-03-30 07:06:14高紅麗高麗英范雙雙
公路交通科技 2020年3期
高紅麗,高麗英,范雙雙
(1.西南交通大學 交通運輸與物流學院,四川 成都 611756;2.西華大學 汽車與交通學院,四川 成都 610039; 3.汽車測控與安全四川省重點實驗室,四川 成都 610039;4. 四川交通職業技術學院,四川 成都 611130; 5.四川(成都)兩院院士咨詢服務中心, 四川 成都 610041)
0 引言
隨著道路交通環境的日益復雜化,機動車與汽車保有量逐年增加,機動車駕駛員數量持續增長,汽車交通事故發生數占機動車交通事故發生數比率常年居高不下,近5 a來維持在75%以上。
有關道路交通事故相關原因的許多研究結果表明[1-6], 人是導致交通事故的關鍵因素,駕駛員作為機動車輛的操縱者,是引發道路交通事故的最主要原因。
國內外對不安全駕駛行為進行了一系列相關研究。Parker等[7]研究發現風險態度越高越容易發生攻擊性駕駛行為。Ulleberg等[8]分析發現青年駕駛員風險態度因素與風險駕駛行為之間均存在顯著相關。李鳳芝[9]參考了國外攻擊性駕駛行為問卷量表,證明了其中文譯本在國內有較好的適應性,隨后李鳳芝[10]通過問卷調查與結構分析,發現駕駛員具有攻擊性駕駛行為的傾向表現。駱勇[11]構建了攻擊性駕駛行為量表并進一步分析了A型人格與攻擊性駕駛行為的相關性。賈云帆等[12]通過調查駕駛員憤怒量表與駕駛風格量表,發現駕駛員的攻擊性駕駛行為與憤怒情緒呈正相關。國外有研究者結合計劃行為理論(Theory of Planned Behavior,TPB)與駕駛行為問卷(Driving Behavior Questionnaire,DBQ)設計了駕駛分心的敏感性問卷(Susceptibility to Driver Distraction Questionnaire,SDDQ)來預測駕駛中導致分心駕駛的次任務[13]。Sullman等[14]基于計劃行為理論,對212名英國駕駛員進行調查,研究了駕駛員在開車時使用手機發信息或打電話行為意向的強烈程度。
目前國內外針對正向駕駛行為也有相關研究。?zkan等[15]在DBQ的基礎上,開發了衡量積極駕駛行為的量表,研究積極行為與違規、錯誤、攻擊性、交通違規和事故之間的關系。在駕駛風格研究中,Harris等[16]通過親社會性和攻擊性駕駛調查量表(Prosocial and Aggressive Driving Inventory,PADI),研究分析出親社會駕駛行為與交通違規的相關性低于攻擊性駕駛行為。陳文金[17]基于防御性駕駛提出了更公正的定量認定事故責任的方法。Shen等[18]利用?zkan與Lajunen的積極駕駛行為的中文譯本探討了我國駕駛員積極駕駛行為與人格的關系。
目前大多數研究著重偏向于駕駛員行為的負面導向分析,從正面引導相對很少。防御性駕駛行為是一種可以有效降低交通事故發生率及事故損傷度的正向駕駛行為,截至目前國內外尚未對防御性駕駛行為進行量化研究,同時當前防御性駕駛技術培訓對象主要是運輸公司的職業駕駛員,龐大的私家車駕駛群體對防御性駕駛并不了解。基于此,本研究將研究對象鎖定為非職業駕駛員,在結合駕駛員心理變量基礎上界定防御性駕駛行為基本概念,開發防御性駕駛行為量表(Defensive Driving Behavior Scale,DDBS),通過問卷調查方法獲取數據,對防御性駕駛行為影響因素進行定量分析。
1 研究方法與理論
1.1 計劃行為理論
計劃行為理論(TPB)是Fishbein和Ajzen在理性行為理論(Theory of Reasoned Action,TRA)的基礎上提出的,該理論在各種行為研究中得到了廣泛應用。根據計劃行為理論,本研究提出防御性駕駛行為預測假設模型。模型將駕駛員對防御性駕駛行為的行為態度(Attitude toward Behavior, AT)、主觀規范(Subjective Norm, SN)、 知覺行為控制(Perceived Behavioral Control, PBC)和過去防御性駕駛行為(Prior Defensive Driving Behavior, PDDB)作為預測變量,將行為意向(Behavior Intention,BI)作為結果變量。
1.2 結構方程模型理論
結構方程模型整合了因子分析與路徑分析兩種統計方法,包含觀測變量、潛在變量、誤差項或誤差變量間的關系。完整的結構方程模型涵蓋兩個基本模型:測量模型與結構模型。
測量模型由觀測變量與潛在變量構成,通過測量模型可分析潛在變量與該系列觀測變量的共變效果,測量模型大多數用回歸模型表示,觀測變量為自變量,潛在變量為因變量。量模型用矩陣表示,其公式如下:
X=ΛXξ+δ,
(1)
Y=ΛYη+ε,
(2)
式中,X為外衍潛在變量的觀測變量;Y為內衍潛在變量的觀測變量;ΛX為連結X對變量ξ的系數矩陣;ΛY為連結Y對變量η的系數矩陣;ξ為外衍潛在變量;η為內衍潛在變量;δ為變量X的測量誤差;ε為變量Y的測量誤差;δ與ξ,η,ε不相關;ε與ξ,η,δ不相關。
結構模型主要表示潛在變量之間的因果關系,作為因的潛在變量為外衍潛在變量,作為果的潛在變量為內衍潛在變量,因此結構模型又被稱為因果模型與潛在變量模型。結構模型的矩陣方程式為:
η=Bη+Γξ+ζ,
(3)
式中,B為內衍潛在變量與內衍潛在變量間的回歸系數矩陣;Γ為外衍潛在變量ξ對內衍潛在變量η的回歸系數矩陣;ζ為外衍潛在變量對內衍潛在變量無法解釋的殘差項。
2 防御性駕駛行為
2.1 防御性駕駛行為界定
防御性駕駛概念最早由史密斯提出,并于1952年創辦了全美第1個專業駕駛員培訓公司,開發了“防御性駕駛培訓”課程,隨后此概念應用流行于英美等國家,現廣為世界各國所采用。結合福建省某研究小組制作的推廣視頻,將防御性駕駛技術行為界定為:放眼遠方,觀察前方交通狀況,提早預防交通事故;顧全大局,隨時環顧所駕駛車輛四周的環境;留有余地,與前車保持安全距離,遠離大貨車;預估風險,根據周圍的交通環境,預測可能發生的事故及危害性,提前做好規避措施;引人注意,通過鳴笛、開車燈、手勢等方式提醒其他道路使用者[19]。
防御性駕駛行為是指駕駛員在駕駛全過程中(即駕駛前、駕駛中及駕駛后)始終保持主動防御心理,全面預估并有效搜索由于自己、其他道路交通參與者、車輛、道路及相關設施、不良氣候等原因可能帶來的顯性、隱性風險,通過提前采取預防性操作措施,有效避免主動事故(因自己違規或過錯引發交通事故)發生及不卷入被動事故(他人違規或失誤引發交通事故)的一種安全駕駛行為模式。
基于防御性駕駛概念與防御性駕駛行為界定,參考積極駕駛行為量表的內容,將防御性駕駛行為設定為6個因子構面:遵守規則不僥幸、預估風險、保持安全空間、專注不分心、引人注意和寬容禮讓。據此設計出防御性駕駛行為量表。
2.2 防御性駕駛行為調查數據
采用問卷調查方法,調查對象為非職業機動車駕駛員,其總體數量相當大,根據對應抽樣調查公式計算得到最小樣本數為385。
本研究所用數據于2018年12月份調查獲得。調查方法為通過“問卷星”發放問卷,由于問卷題項較多,為提高調查問卷的回收有效性,采用方便抽樣法對作者微信、QQ和校內辦公系統中不同時期結識且持有有效駕駛證的親朋好友逐個發放調查問卷,在此基礎上利用滾雪球方法獲取更多調查問卷。采用反向題和答題時間兩個標準篩選問卷共獲取有效問卷525份。駕駛員駕駛行為影響因素包括個人社會屬性、駕駛經驗和個人安全意識等方面。本研究就個人基本社會屬性和駕駛經驗對被調查者進行統計,結果如表1所示。
2.3 防御性駕駛行為分析
對DDBS各指標進行可靠性檢驗,用糾正題項的總相關系數(Corrected Item Total Correlation,CITC)純化題項,CITC指每個題項與其他所有題項之和的相關系數,其指標值一般應不小于0.4,用克隆巴赫系數α檢驗測量題項的信效度。對防御性行為量表的調查樣本進行信度檢驗,結果如表2所示,所有題項指標的CITC均大于0.4,各構面的α均大于0.75,表示樣本具有較高的可靠性。
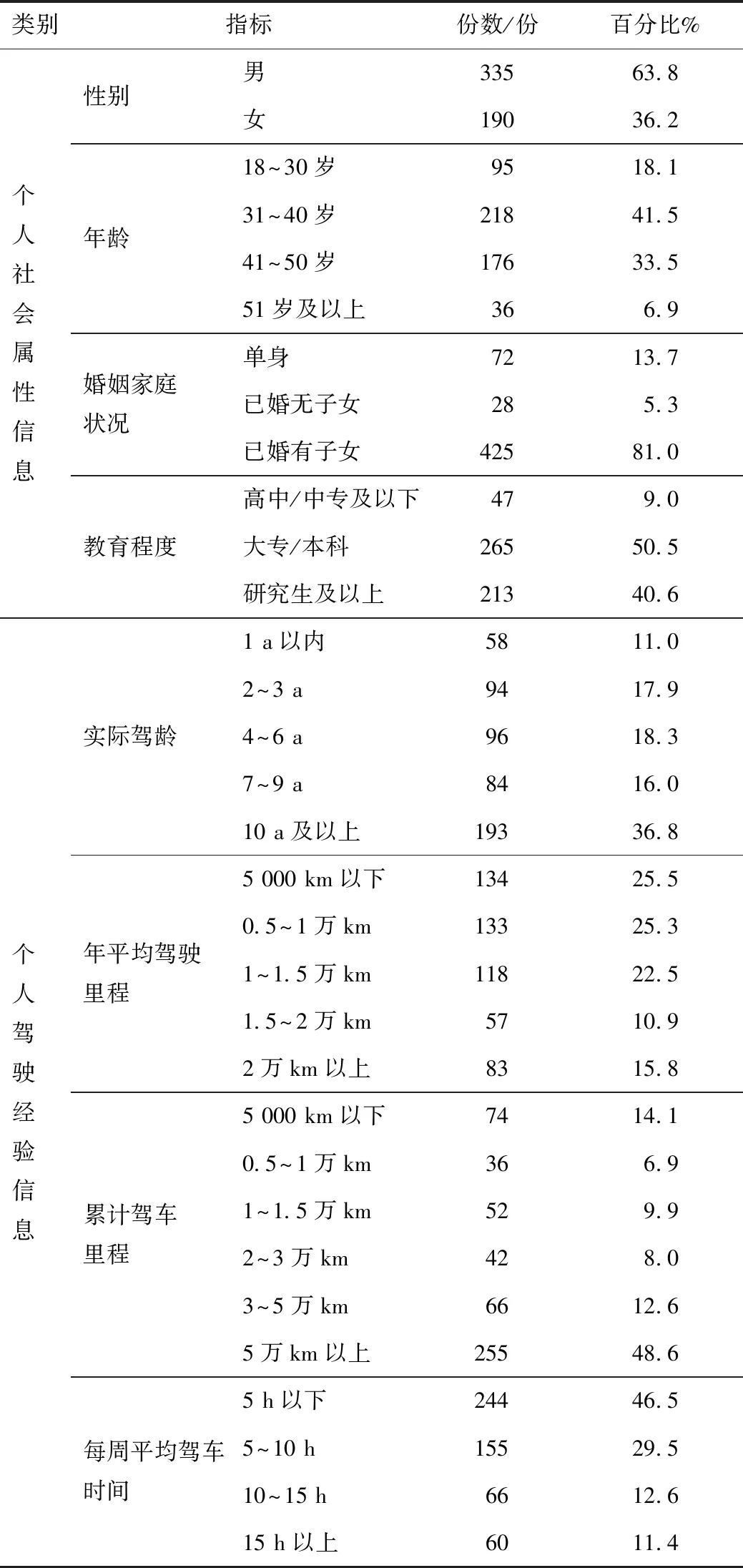
表1 調查數據統計結果Tab.1 Statistical result of survey data
3 防御性駕駛行為結構分析
3.1 模型假設
TPB中的行為態度(AT)體現了駕駛員對防御性駕駛行為的評價,從降低事故率(AT1)、車輛油耗(AT2)、保險支出(AT3)、降低駕駛焦慮感(AT4)與增強信任度(AT5)5個方面分析對防御性駕駛行為的態度;從重要他人(SN1)、其他交通參與者(SN2)、主流媒體(SN3)與交管部門(SN4)4個主觀規范方面分析外界壓力對執行防御性駕駛行為的影響;從知覺行為控制(PBC),從自主控制(PBC1)、駕駛習慣(PBC2)、促進作用(PBC3)與難易程度(PBC4)4個方面來分析對執行防御性駕駛行為的行為控制力;從自己未來行為意向(BI1)、對重要他人影響意向(BI2)、對其他駕駛員影響意向(BI3)和行為廣泛宣傳意向(BI4)4個方面設置題項分析防御性駕駛行為意向,并將防御性駕駛行為量表(DDBS)對調查對象最近1 a內防御性駕駛行為的調查數據設定為過去行為的觀測變量,通過擴展TPB模型對行為意向的影響因素構建出基于TPB理論的SEM模型,提出以下8點假設:
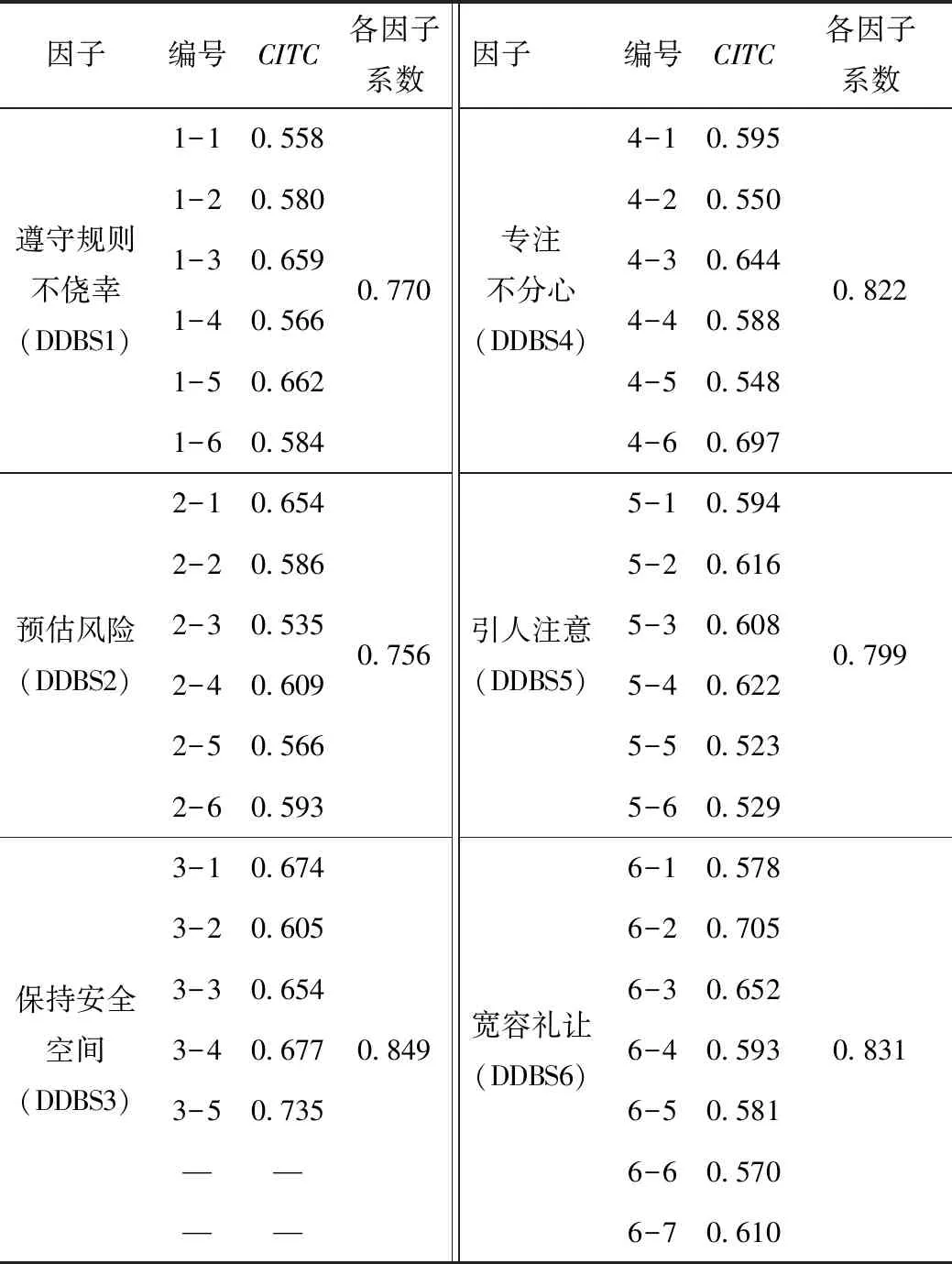
表2 DDBS信度檢驗Tab.2 Reliability test for DDBS
H1:駕駛員對防御性駕駛行為的態度與主觀規范(SN)表現為相互正向影響;
H2:駕駛員的防御性駕駛行為主觀規范與知覺行為控制表現為相互正向影響;
H3:駕駛員對防御性駕駛行為的態度與知覺行為控制表現為相互正向影響;
H4:駕駛員的過去防御性駕駛行為分別與對防御性駕駛行為的態度、主觀規范、知覺行為控制表現為相互正向影響;
H5:駕駛員對防御性駕駛行為的態度正向影響執行防御性駕駛行為的意向;
H6:駕駛員的防御性駕駛行為主觀規范正向影響執行防御性駕駛行為的意向;
H7:駕駛員的防御性駕駛行為知覺行為控制正向影響執行防御性駕駛行為的意向;
H8:駕駛員的過去防御性駕駛行為正向影響執行防御性駕駛行為的意向。
根據模型的基本假設前提,基于TPB的防御性駕駛行為SEM模型,AT,SN,PBC,PDDB為外衍潛在變量,BI為內衍潛在變量。
3.2 模型識別3.2.1 正態性檢驗
在SEM模型分析中,用偏態系數與峰度系數進行樣本變量的正態性檢驗與評估,偏態系數絕對值大于3、峰度系數絕對值大于10,變量數據偏離正態分布較為嚴重。根據正態性評估結果可知,偏態系數的數值范圍為-1.786~-0.254,其絕對值小于2;峰度系數的數值范圍為-1.090~3.176,其絕對值小于4,表示變量數據呈未嚴重偏離的正態分布,變量滿足正態性的檢驗要求。
用正態概率分布的Q-Q圖直觀地觀察樣本的正態性(圖1~圖2)。由圖1和圖2可知,DDBS及TPB中的AT,SN,PBC與BI,理論與實際的正態累積概率分布基本重合,其中只有SN具有稍微的偏差,但其偏態系數的絕對值小于2,在可接受范圍內,則目標觀測變量PDDB,AT,SN,PBC和BI為正態分布變量。
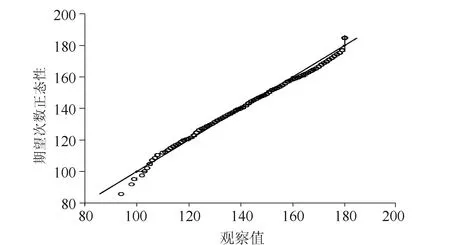
圖1 DDBS的樣本Q-Q圖Fig.1 Q-Q diagram of DDBS
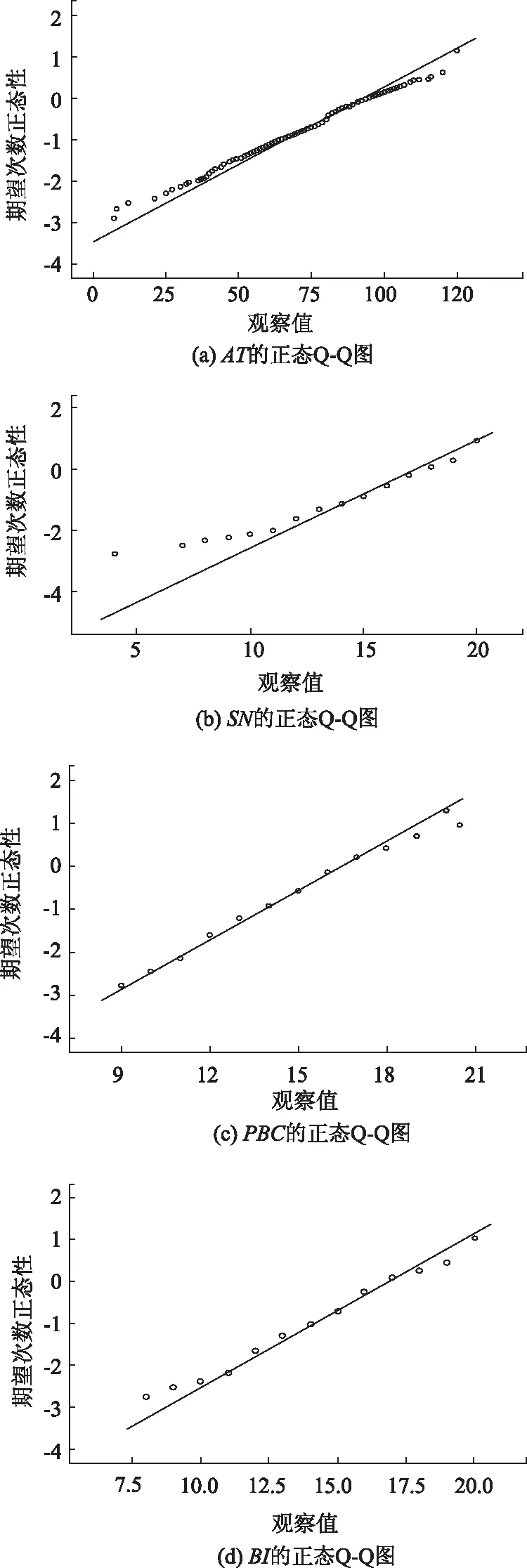
圖2 TPB指標的樣本Q-Q圖Fig.2 Q-Q diagram of TPB indicators
3.2.2參數估計
由于觀測變量PDDB,AT,SN,PBC與BI為正態分布,符合極大似然法(ML)的數據分布,ML法是檢驗SEM模型適配度應用最廣的方法。
3.3 適配評價
SEM模型的適配度評價指標用來考察模型與數據的擬合程度,通常用以下6個指標進行判斷。如表2所示,模型經過多次修正后,各指標均滿足適配標準,說明模型與樣本數據間能進行較好的擬合。
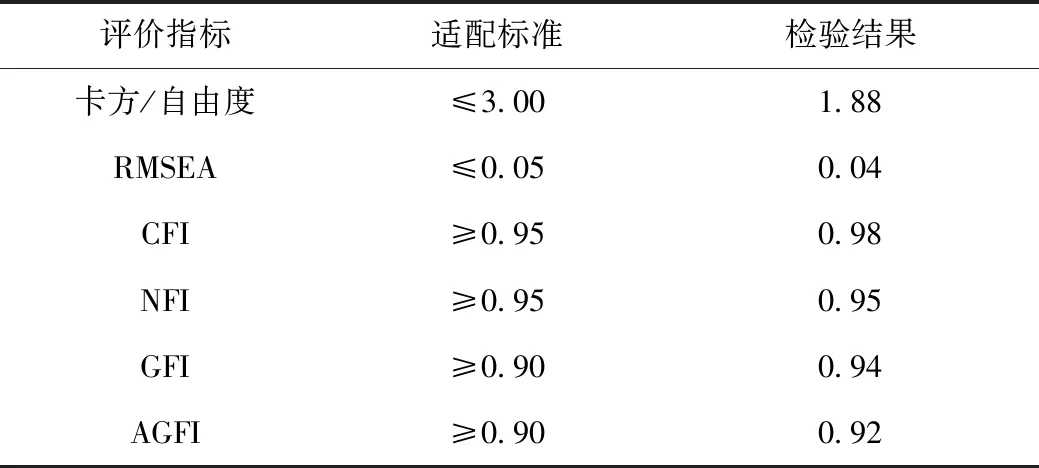
表2 模型適配度評價Tab.2 Evaluation of model fitness
最終的模型系數經過標準化處理,防御性駕駛行為意向(BI)與主觀規范(SN)之間的路徑系數達到顯著性,結果如圖3所示。
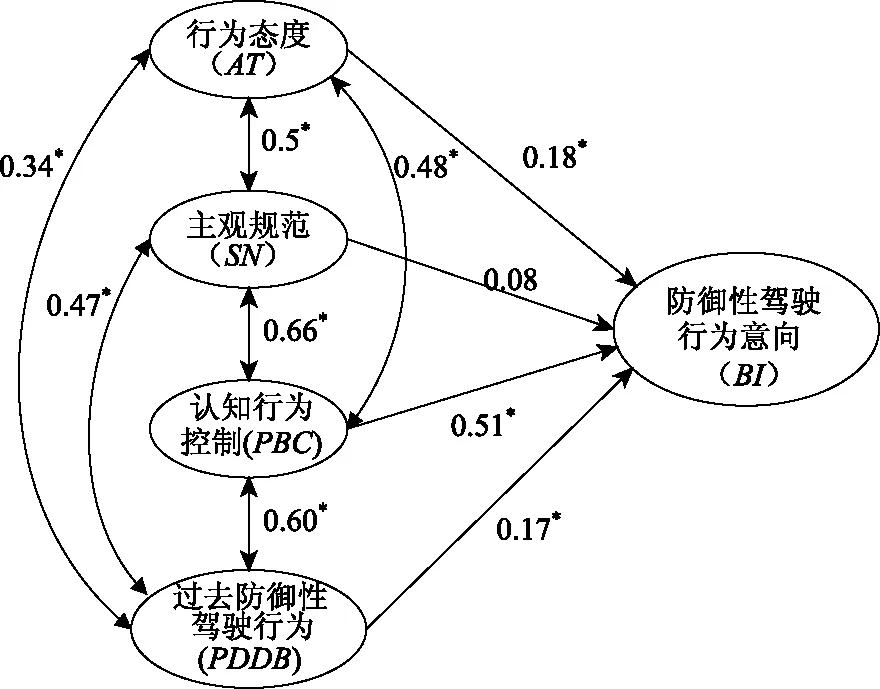
圖3 模型擬合結果Fig.3 Model fitting result
4 模型驗證結果分析
根據基于擴展TPB的防御性駕駛行為SEM模型修正與驗證的結果,對提出的模型假設進行檢驗,結果如表3所示。
SEM的結構模型分析:主觀規范(外界壓力)對執行防御性駕駛行為意向的影響不顯著,則忽略不計,這一結果與之前研究得出的主觀規范對負面行為[20]影響比較顯著,對正面行為[21]影響不顯著相一致。在式(4)中知覺行為控制對行為意向的影響最大(0.51),說明PBC每增加1單位,防御性駕駛行為意向將上升0.51個單位。
BI=0.18AT+0.51PBC+0.17PDDB。
(4)
SEM的測量模型分析:根據式(1)與式(2)可得到測量模型,由于AT,SN,PBC在進行回歸測量模型分析時,所產生常數項的數量級均為10-14,DDBS的常數項數量級為10-13,則可以忽略常數項,得到標準化系數測量模型如下:
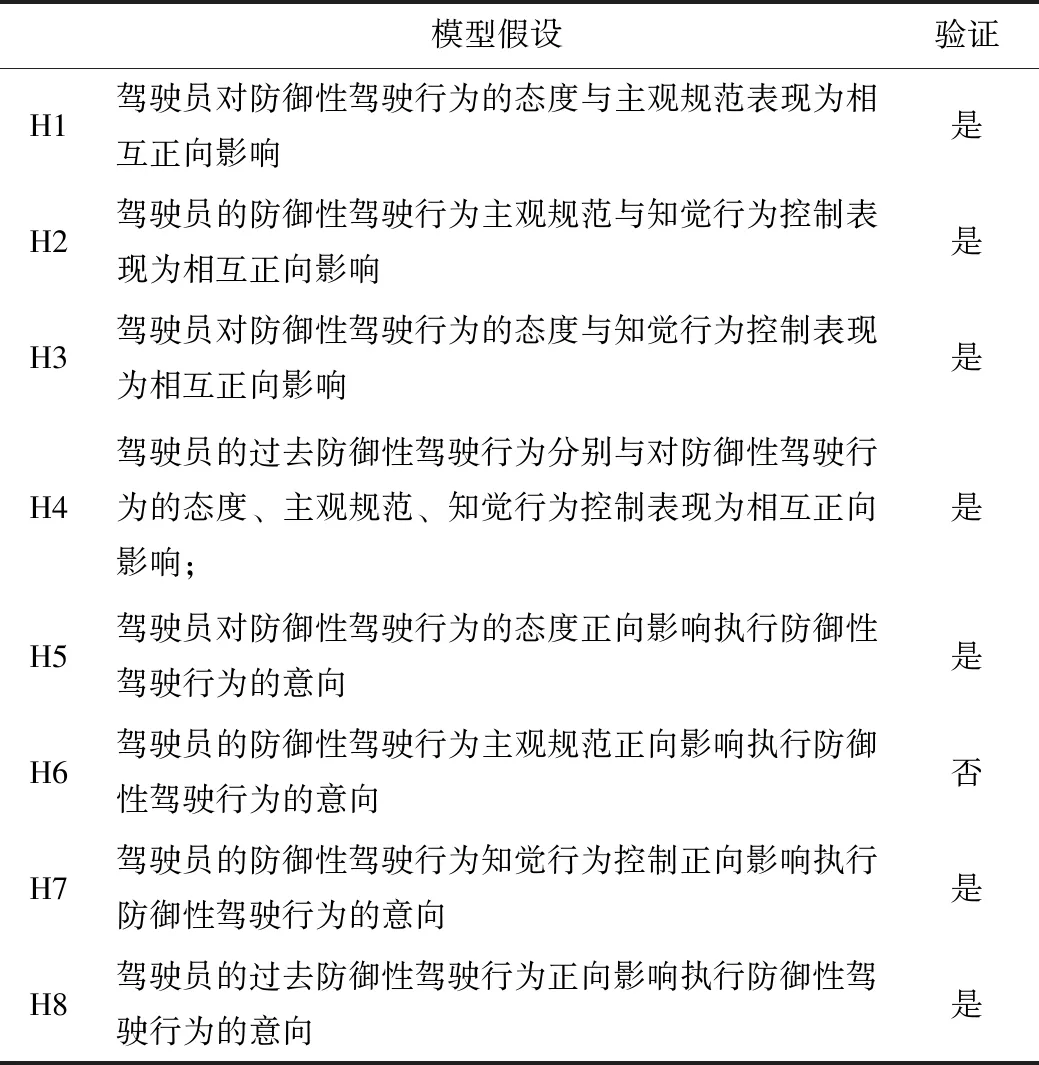
表3 模型假設驗證結果分析Tab.3 Analysis of model hypothetical verification result
AT=0.21AT1+0.28AT2+0.27AT3+0.25AT4+
0.26AT5,
(5)
SN=0.33SN1+0.33SN2+0.32SN3+
0.29SN4,
(6)
PBC=0.3PBC1+0.3PBC2+0.26PBC3+
0.41PBC4,
(7)
PDDB=0.19DDB1+0.16DDB2+0.15DDB3+
0.22DDB4+0.19DDB5+0.23DDB6。
(8)
由此可知,在行為態度、主觀規范與過去防御性駕駛行為方面,各因子影響程度較為平均;在知覺行為控制方面,一直保持防御性駕駛的難易程度(PBC4)對駕駛員控制自己執行防御性駕駛行為的影響較大(0.41)。
5 結論
本研究結合防御性駕駛技術要點和駕駛員安全意識界定了防御性駕駛行為基本內涵,在此基礎上確定了防御性駕駛行為6要素,進一步設計了防御性駕駛行為量表(DDBS)。為定量揭示非職業駕駛員防御性駕駛行為意向影響因素,基于計劃行為理論構建了行為態度、主觀規范、知覺行為控制、過去防御性駕駛行為與行為意向的結構方程模型,采用網上調查方法獲取有效數據,驗證了設計量表的信效度。進一步分析表明,知覺行為控制對執行防御性駕駛行為意向影響最大;過去防御性駕駛行為對行為意向存在影響;主觀規范對執行防御性駕駛行為意向的影響不顯著。說明了該模型中的行為態度、知覺行為控制與過去防御性駕駛行為對執行防御性駕駛行為的意向有較好的解釋力與預測力。
后續研究應結合不同道路條件、不同氣候環境和不同駕駛群體進一步細化駕駛場景,在本研究防御性駕駛6大核心要點的基礎上,設計細化的防御性駕駛行為量表,擴大調查范圍,并輔以模擬駕駛器、VR行為獲取方式,更細致地分析不同類別防御性駕駛行為特征及影響因素,最終實現駕駛員防御性駕駛能力定量核準與車險、車保等掛鉤,促使駕駛員逐步形成良好駕車習慣,使得交通環境形成良性循環,從而大大降低道路交通事故的發生率和對人類的損傷度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
汽車實用技術(2022年4期)2022-03-07 06:07:20
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
公民與法治(2016年4期)2016-05-17 04:09:26
