類F-16飛行器風洞虛擬飛行試驗研究
2020-03-29 13:05:34張石玉趙俊波付增良周家檢
實驗流體力學 2020年1期
關鍵詞:模型
張石玉, 趙俊波, 付增良, 梁 彬, 周家檢
(中國航天空氣動力技術研究院, 北京 100074)
0 引 言
隨著新型作戰飛行器的快速發展,高機動性和高敏捷性成為先進作戰飛行器的重要特性。在大迎角機動時,飛行狀態變化劇烈,非定常流動特性和氣動-控制耦合問題對氣動研究、控制系統設計和地面驗證提出了新的挑戰[1]。傳統的風洞試驗基于小擾動線性化理論,從靜態風洞試驗、自由振動/強迫振動風洞試驗、旋轉天平試驗等獲得小擾動線性化后的氣動導數,將各氣動導數疊加以構建飛行器的氣動數據庫和氣動模型,并用于飛行控制律設計。這一過程獲得的氣動參數在小迎角時可靠性較高,但對于大迎角機動情況,由于沒有考慮非定常流動特性的時間過程效應,試驗結果不能充分反映實際飛行時的氣動特性。基于小擾動線性化假設的氣動數據設計的控制律在大迎角飛行時可能產生控制偏差,甚至由于嚴重的控制滯后、控制反效等作用導致災難性后果。
飛行器風洞虛擬飛行試驗技術是一種先進的風洞試驗技術,模型安裝在具有多個自由度的專用支撐機構上,放開3個角位移自由度(部分研究包括多個線位移自由度) ,通過舵面控制等手段對模型進行機動控制,在風洞中實現較逼真的模擬飛行器機動運動過程。通過運動過程分析能夠清晰直觀地獲得飛行器在非線性非定常區域的氣動特性;通過控制響應結果評估控制系統及控制律;為同步開展飛行器氣動/控制設計、提早發現氣動布局和控制律潛在問題、降低研制后期出現重大問題的概率、縮短型號研制周期、降低型號研制成本提供有效的試驗評估手段。
各航空航天強國在相關領域開展了大量研究。英國Bristol大學Lowenbergy[1-5]所在團隊自2002年以來開展了大量研究,包括:Hawk模型的迎角緩增長試驗,獲得了迎角上下行時不同的迎角振蕩極限環區間;M2370模型飛機的三自由度開環控制響應試驗,從試驗數據中辨識了大量氣動系數。之后研發了模型三自由度軸承+三自由度搖臂+配平翼系統,該系統的優點是實現模型繞速度軸的360°自由滾轉,并提供俯仰沉浮運動自由度和側向運動自由度,利用該系統開展了Hawk模型的多自由度階躍信號控制響應試驗、閉環控制響應試驗。美國的Magill等[6]采用張線+俯仰滾轉軸承的支撐方式開展了空空彈的三自由度控制響應試驗,該機構的優點在于彈體模型可繞縱軸做360°自由滾轉運動。德國的Bergmann等[7]研發了六自由度模型支撐機構,開展了民機模型和X-31模型的相關研究。英國Cranfield大學Carnduff等[8]研發了放開沉浮運動的四自由度模型支撐機構,開展了Hawk模型的控制響應試驗。瑞典皇家技術學院Stenfelt等[9]開展了飛翼布局飛行器的偏航單自由度階躍響應試驗。
國內在相關領域研究相對較晚。中國航天空氣動力技術研究院胡靜、李潛[10]采用張線支撐+滾轉軸承的形式開展了導彈外形的滾轉偏航兩自由度開環控制響應試驗。中國空氣動力研究與發展中心趙忠良等[11-13]在2.4 m跨聲速風洞中建立了“自由滾轉+自由俯仰+偏航驅動控制”的試驗機構,開展了導彈類飛行器的開環、閉環控制響應試驗。中國航空工業空氣動力研究院針對四代機和飛翼布局飛行器開展了相關試驗研究。南京航空航天大學等[14-19]在風洞試驗相似關系、試驗與真實飛行差異等方面開展了理論分析和仿真研究。
本文介紹中國航天空氣動力技術研究院第二研究所在風洞虛擬飛行試驗技術領域的研究成果。基于三自由度軸承支撐系統,以類F-16飛行器為研究對象,在低速風洞中開展多自由度開環/閉環控制響應試驗,對飛行器短周期運動模態、自動配平、閉環控制信號跟隨性進行了研究,并測量到大迎角俯仰失穩、負迎角荷蘭滾失穩非定常試驗現象。
1 試驗系統
試驗系統如圖1所示,系統由試驗模型、三自由度軸承機構、測控通信模塊、支桿以及舵機、配重等組成。模型通過軸承機構安裝在支桿上,軸承轉心與模型質心重合,模型可繞質心自由轉動。測控通信模塊安裝于模型內腔后段,實現模型姿態角速度和姿態角測量、舵機偏轉控制、與上位機無線通信等功能。

圖1 三自由度虛擬飛行試驗系統
試驗系統采用ADIS16488A微機械陀螺(MEMS) 測量模型角速度和角位移,角速度零漂標稱值5.1°/h;采用無線射頻模塊實現與上位機的無線通信;伺服舵機為Power HD-D-04HV全金屬舵機,輸出扭矩標稱值0.42 Nm;舵偏角運動范圍限定為-30°~30°。
試驗中,先將上位機根據當前狀態解算舵機控制指令,并通過無線通信下傳至測控通信模塊,測控通信模塊根據指令操縱舵機產生舵面偏轉;模型在氣動作用下發生角運動,由MEMS測量模型姿態角;之后模型狀態信息通過無線通信上傳至上位機,從而完成一個試驗周期。
1.1 三自由度軸承
三自由度軸承機構是本試驗的核心部件,機構示意圖見圖2,實物圖見圖3。三自由度軸承機構采用3個軸承分別提供偏航、俯仰和滾轉轉動自由度,并采用限位螺釘限制最大轉角。試驗時軸承機構運動范圍分別為:俯仰角-35°~35°;滾轉角-35°~35°;偏航角-45°~45°。
1.2 試驗模型
試驗模型為縮比系數1/14的類F/A-16戰斗機模型。模型采用左右全動平尾同向轉動控制俯仰角,差動控制滾轉角,立尾后緣方向舵控制偏航角。模型外形與實際F/A-16戰斗機相比存在部分差異(見表1),其余試驗設備介紹詳見文獻[20]。

圖2 三自由度軸承機構結構示意圖

圖3 三自由度軸承機構安裝圖
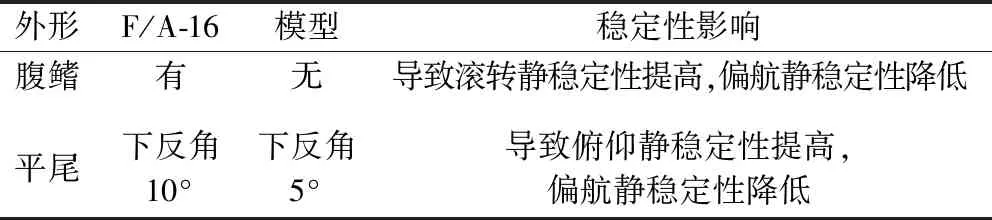
表1 模型外形與實際F/A-16差異表Table 1 Difference between test model and real F/A-16
2 典型風洞試驗
風洞試驗在中國航天空氣動力技術研究院FD-09低速風洞中完成,試驗風速為10~20 m/s。下文詳細介紹開環/閉環控制試驗以及試驗中出現的特殊試驗現象。
2.1 開環控制試驗
開環控制試驗是在配平狀態下直接給定舵偏控制曲線并研究模型動態響應過程的試驗,用于分析飛行器的短周期模態特性。從響應曲線中可辨識模型氣動靜、動穩定性導數以及舵效參數等氣動參數。
2.1.1 升降舵開環控制試驗
典型的升降舵開環控制試驗曲線如圖4所示,組圖分別為升降舵偏角(δe) 曲線和迎角(α) 曲線。在5°配平迎角附近進行升降舵對偶方波機動,激勵俯仰短周期模態運動,并在氣動穩定性作用下恢復原運動狀態。從響應曲線中可獲得運動模態的相關參數,并辨識獲得俯仰氣動靜、動穩定性導數。不同來流速度的氣動參數辨識結果與文獻[21]對比如表2所示。詳細研究結果見文獻[20]。
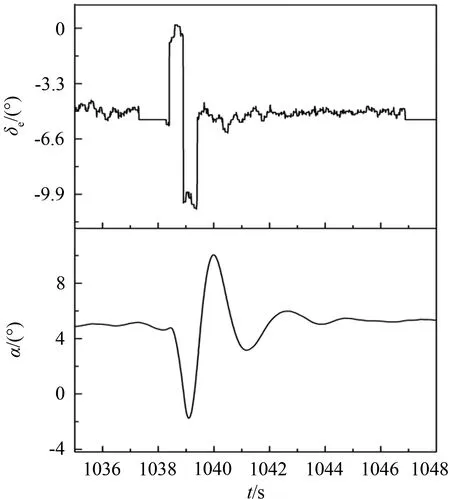
圖4 升降舵開環控制試驗曲線
Fig.4 Open-loop control test curves in elevator maneuvering flight mode test
表2 升降舵開環機動氣動參數辨識結果
Table 2 Aero-parameter identification results of elevator maneuvering test
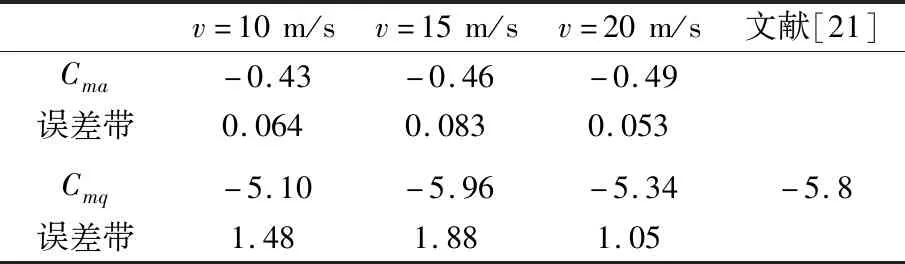
v=10m/sv=15m/sv=20m/s文獻[21]Cma-0.43-0.46-0.49誤差帶0.0640.0830.053Cmq-5.10-5.96-5.34-5.8誤差帶1.481.881.05
2.1.2 方向舵開環控制試驗
典型的方向舵開環控制試驗曲線如圖5所示,組圖分別為方向舵偏角(δr) 曲線、側滑角(β) 曲線和滾轉角(Φ) 曲線。試驗中,模型在5°迎角配平后,施加方向舵對偶方波機動,激勵橫航向荷蘭滾模態運動。
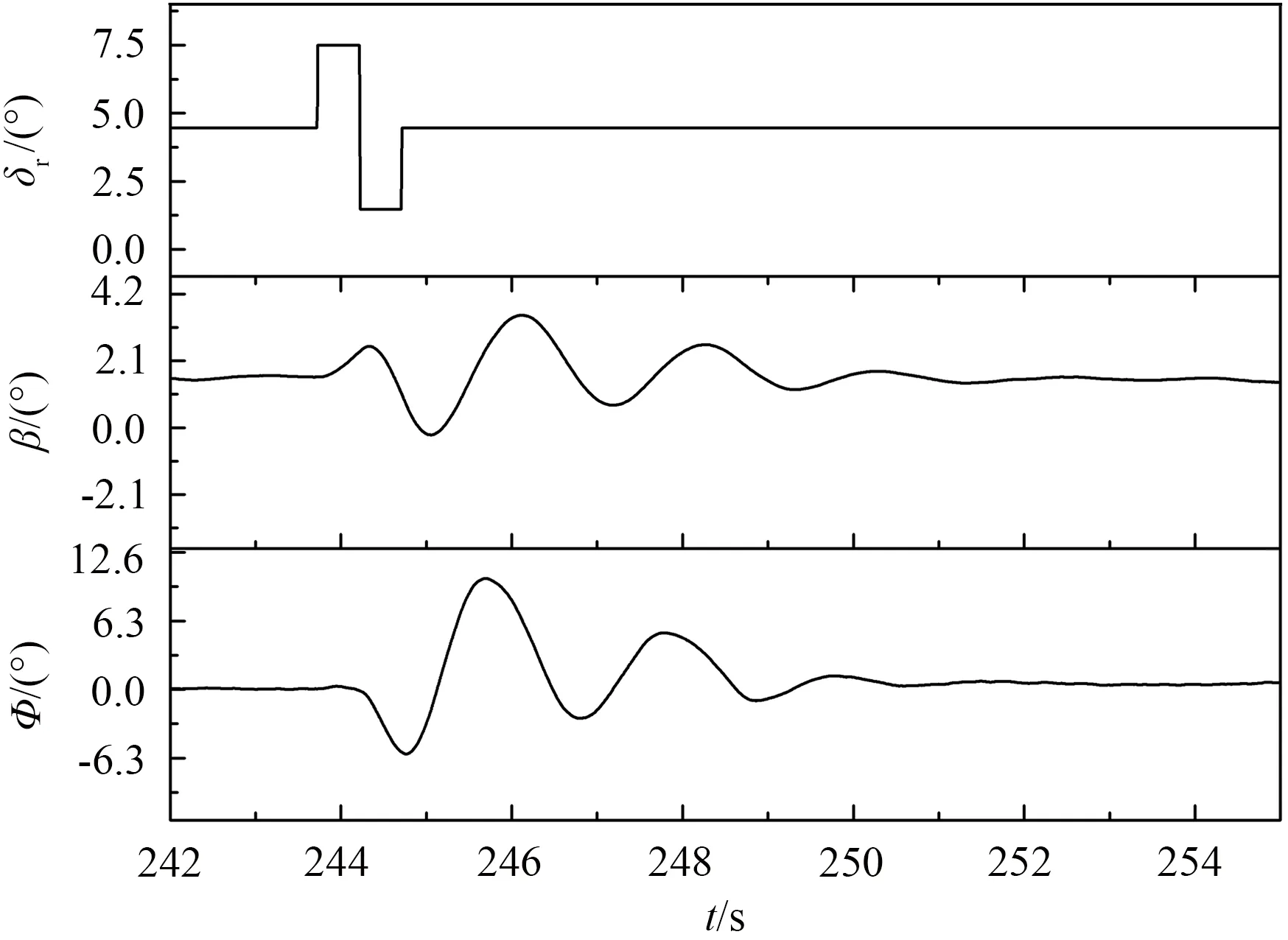
圖5 方向舵開環控制試驗曲線
2.2 閉環控制試驗
閉環控制是以姿態角、過載等飛行狀態作為控制指令,通過控制律解算舵偏信號,將飛行器相應飛行狀態調整到指令狀態的控制方式。風洞虛擬飛行試驗中的閉環控制試驗為開展飛行器控制響應研究、控制系統及控制律驗證、控制效能評估等研究提供有效、直觀、低成本的地面研究手段。
本試驗閉環控制采用廣泛應用于飛行器自動控制的比例-積分-微分控制器(PID) 。控制律基于F-16氣動數據[21]設計,將迎角差量、積分量和變化率反饋給升降舵通道(全動平尾同向轉動) ,作為其比例、積分和微分控制器的輸入;將滾轉角差量、變化率反饋給副翼通道(全動平尾差動轉動) ,作為其比例、微分控制器輸入;將側滑角差量、變化率反饋給方向舵,作為其比例和微分控制器輸入。
2.2.1 自動配平試驗
不同迎角自動配平試驗曲線如圖6所示。組圖分別為迎角曲線和升降舵偏角曲線。模型從0°配平迎角開始間隔為5°的自動配平試驗。當迎角指令為25°時,出現俯仰失穩現象,同時升降舵偏角到達限位附近。之后開始迎角間隔為-5°的自動配平試驗,當迎角指令為-20°時,出現迎角振蕩發散現象。試驗結果表明:俯仰氣動穩定迎角范圍為-15°~20°。
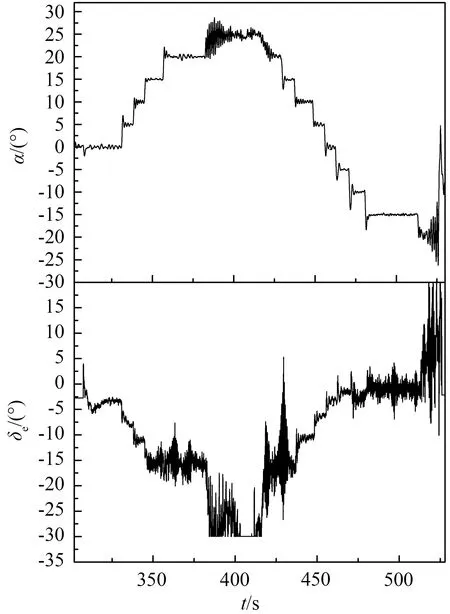
圖6 不同迎角自動配平試驗曲線
分析自動配平試驗過程,可獲得系統在不同迎角時的階躍信號控制特性。圖7為迎角α從0°至5°配平過程的理論迎角指令(α_commamd) 與實際迎角(α_test) 的對比。由圖中可獲得系統階躍信號控制動態指標(見表3)。
表3 控制系統階躍信號動態指標
Table 3 Dynamic performance of control system in step response test

超調量σ/(°)過渡過程時間ts/s振蕩次數N25.25≈3
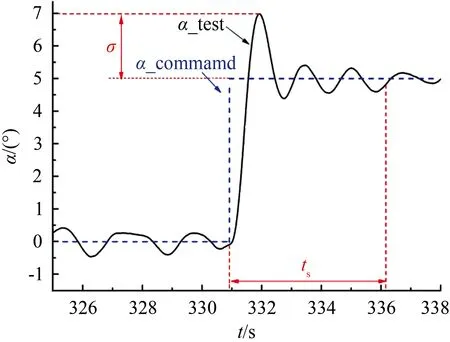
圖7 自動配平過程的階躍響應
2.2.2 迎角正弦指令跟隨性試驗
為了研究控制系統的迎角指令跟隨性,設計了一種迎角指令為正弦信號的閉環控制試驗。迎角指令數學表達式見式(1) ,指令幅值為3°,頻率為0.2 Hz,指令持續時間為10 s。
α=3·sin(0.4πt)t=[0,10]
(1)
試驗結果如圖8所示。由結果可知,試驗中模型跟隨迎角指令做正弦運動,運動規律基本符合指令規律。由圖中實際迎角與迎角指令曲線的峰值點對比可知,模型運動存在響應延遲和超調量,響應延遲為t2-t1=0.65 s,超調量為α2-α1=0.63°。
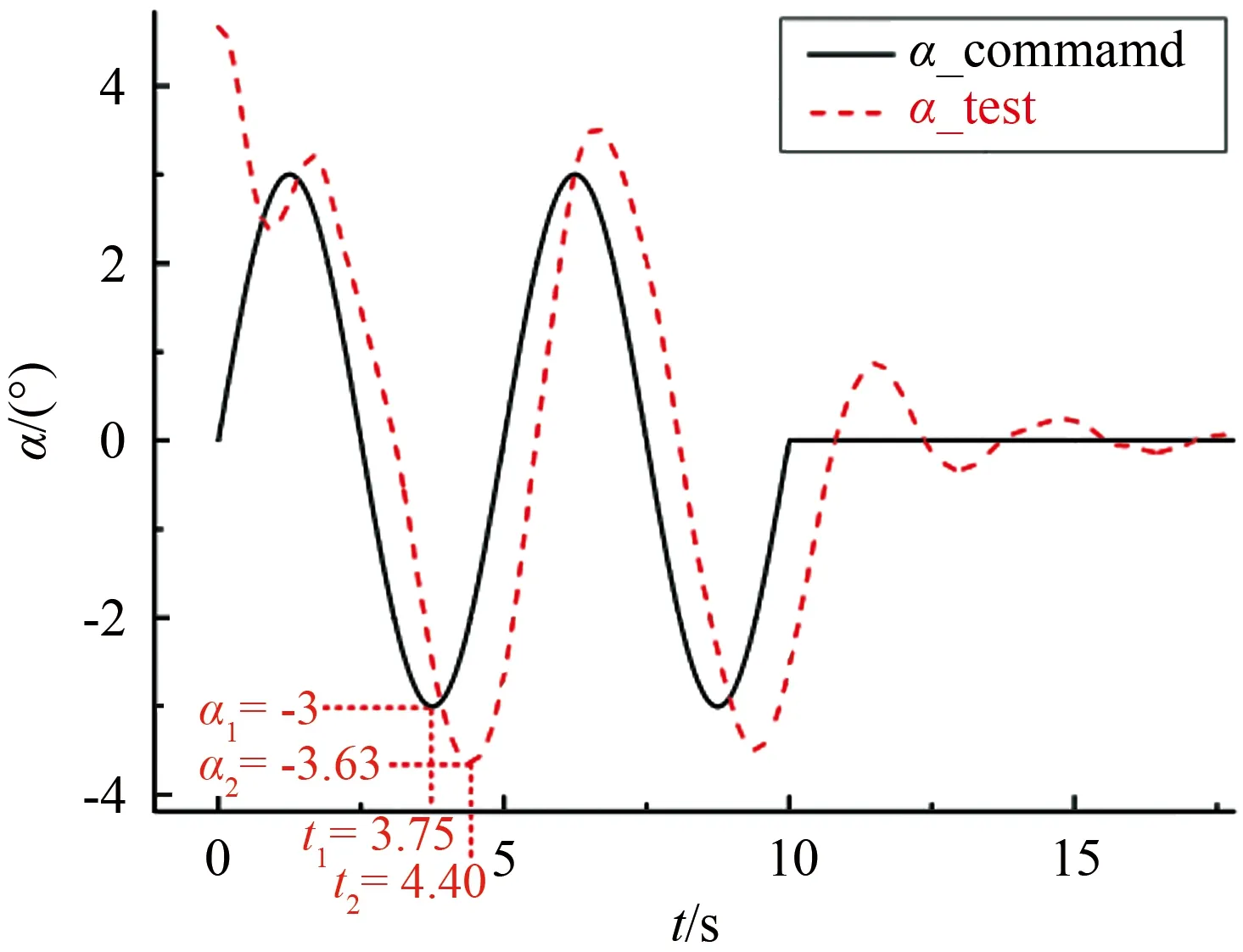
圖8 迎角正弦指令跟隨性試驗曲線
2.3 非定常試驗現象
如前文所述,風洞虛擬飛行試驗技術主要用于非定常流動區域的飛行器氣動特性研究和控制系統驗證。本文開展了相關試驗,測量到多種非定常試驗現象。
2.3.1 大迎角俯仰失穩現象
試驗過程中,當迎角α提高到22°以上時,在無控情況下模型發生俯仰極限環振蕩,如圖9所示。
由試驗結果可知,模型在迎角α=22°附近發生迎角極限環振蕩現象,振幅約為2.5°。分析試驗現象推測:模型背風區表面發生規律的流動分離和再附過程,導致模型俯仰動穩定性降低,從而產生迎角極限環振蕩現象。

圖9 大迎角俯仰失穩現象
2.3.2 負迎角橫航向失穩現象
在開展三自由度橫航向機動試驗時發現:當模型迎角為負時,出現了橫航向荷蘭滾模態失穩現象。試驗曲線如圖10~12所示。圖中,ωz為偏航角速度,ωx為滾轉角速度,δe,L為左平尾偏角,δe,R為右平尾偏角。
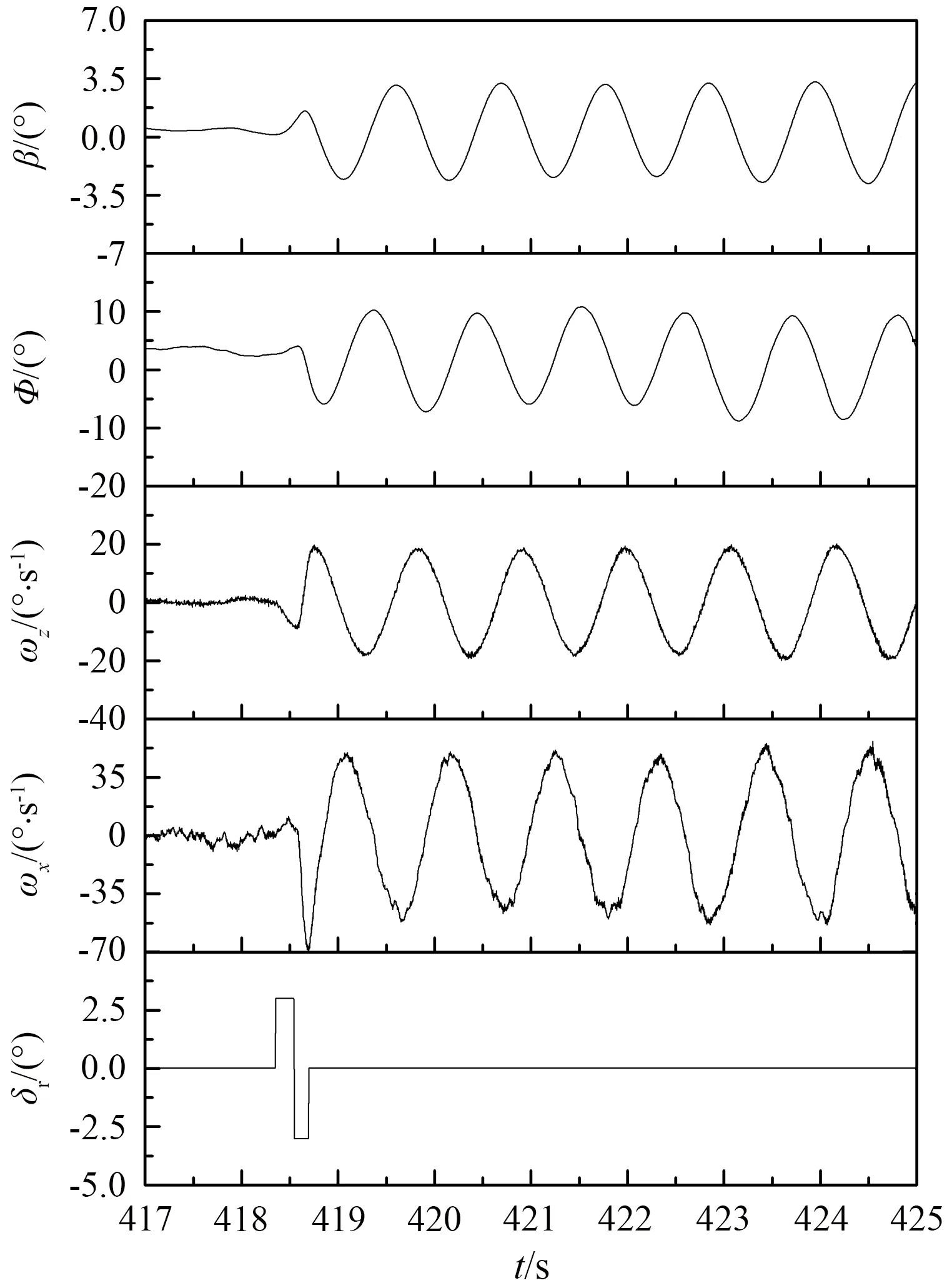
圖10 迎角為-5°時橫航向失穩現象
當迎角為-5°時,開展了方向舵的對偶機動控制試驗,結果導致側滑角和滾轉角發生極限環振蕩,側滑角振幅約為2.5°,滾轉角振幅約為5°。當迎角為-7.5°時,開展了副翼(左右平尾差動) 增穩滾轉通道的閉環控制試驗,此時模型發生橫航向運動和副翼控制耦合振蕩現象,最終形成極限環振蕩,側滑角振幅約為13°,滾轉角振幅約為12°。當迎角增大至-13°時,同樣開展了副翼增穩滾轉通道的閉環控制試驗,此時模型側滑角迅速發散,在10 s時間內振幅達到了22°,伴隨滾轉角劇烈振蕩至限位附近,同時耦合俯仰方向劇烈振蕩。

圖11 迎角為-7.5°時橫航向失穩現象

圖12 迎角為-13°時橫航向失穩現象
分析F-16氣動數據[22]發現:在負迎角時,模型處于橫向弱靜穩定、滾轉交叉耦合導數為負(Clr<0) 的滾轉動不穩定狀態。迎角為-5°無干擾時模型處于中立穩定狀態(圖10中418 s之前) ;當施加一個擾動(方向舵激勵) 后,模型開始作由滾轉交叉耦合作用引起的周期性荷蘭滾振蕩運動,振蕩頻率為模型荷蘭滾自振頻率,約為0.91 Hz。當迎角增大至-7.5°時,滾轉穩定性進一步降低,此時滾轉增穩控制未能抑制荷蘭滾發散,并最終與模型運動耦合為穩定的橫航向振蕩運動,振蕩頻率約為0.51 Hz。之后在983 s時,通過升降舵控制(δe,L和δe,R同向控制) 改變模型迎角至5°后,模型從橫側向失穩中改出。當迎角為-13°時,滾轉穩定性進一步降低,飛行器處于橫航向劇烈失穩狀態,同時也耦合俯仰方向劇烈振蕩。此時的滾轉增穩控制也無法抑制三通道耦合運動發散。
3 結 論
本文基于三自由度軸承系統,開展了類F-16模型的低速風洞三自由度虛擬飛行試驗。主要結論如下:
(1) 試驗系統具備開展非定常流動特性研究試驗和控制律驗證試驗的能力。
(2) 在大迎角試驗中測量到俯仰非定常流動失穩現象,負迎角試驗中測量到橫航向耦合失穩現象。
(3) 負迎角橫航向耦合失穩試驗表明,滾轉增穩控制難以恢復橫航向穩定性,且可能發生運動-控制耦合振蕩,而通過俯仰控制改變迎角可有效恢復橫航向穩定性。
隨著航空航天飛行器的不斷發展,氣動設計與飛行控制設計的關系越來越密切,空氣動力學與飛行控制呈現緊耦合發展趨勢。本文建立的風洞虛擬飛行試驗技術順應先進飛行器氣動-控制耦合研制趨勢,不僅可用于軍機大迎角靜/動態失穩研究、翼搖滾邊界試驗,也用于控制系統分析及控制律驗證及優化測試,為飛行器的氣動-控制同步設計提供技術支持。
致謝:感謝中國航天空氣動力技術研究院李潛研究員在本文研究中給予的指導與幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
