手持GPS接收機三參數的應用與分析
2020-03-26 07:39:56張楨哲
世界有色金屬 2020年1期
張楨哲
(寶雞西北有色七一七總隊有限公司,陜西 寶雞721012)
在地質勘查工作中,不管是進行工作區內控制點的外業踏勘,還是進行地質填圖工作,或者小比例尺土壤采樣工作。有時會使用到手持GPS接收機坐標采集或定位。因為手持GPS接收機,有著體積小,攜帶方便,定位速度快,而且可以滿足全天候的工作的特點,被廣泛應用在很多方面。它可以采集工作區內的已知點的WGS-84坐標(B、L、H),然后和已知點的高斯平面直角坐標,利用計算機內的坐標轉換軟件,快速的計算出該點的三參數輸入手持GPS接收機內,然后方便快速的采集坐標點位或者進行坐標的放樣。每個工作區可能它的坐標系統不一樣,有的也許是北京54坐標系,有的也許是西安80坐標系,或者是施工獨立坐標系。目前我們國家現階段采用是CGCS2000坐標系[1]。不管是哪種坐標系統,因為手持GPS接收機采集的是WGS-84坐標系,因為采用的坐標系統和坐標基準和實際工作區內的坐標基準不一致,所以在使用手持GPS接收機進行作業前,首先需要將坐標基準進行統一。
1 GPS定位原理
我們知道GPS能夠快速的采集地面點的三維坐標數據。下面我們首先了解下GPS的工作原理。GPS全球導航定位導航系統一般三個部分組成,分別如下:空間衛星部分、地面數據處理部分及用戶設備三部分組成。GPS空間部分由24顆衛星構成,它們在一定的軌道繞地球旋轉,由6個軌道,每個軌道4顆衛星組成[2,3]。這樣使得無論任何時刻,在任何地點都可以觀測至少4顆衛星,同過距離交會對地面點進行定位。地面部分由主控站、注入站和監控站組成。監控站通過不間斷的接收衛星信號,來監測衛星的工作狀態。主控站通過各個監控站對GPS的觀測數據,計算出衛星的各種參數進行改正,然后同過注入站向衛星發布命令。
2 手持GPS接收機應用
手持GPS接收機采用的是單點定位,我們知道GPS的誤差主要是分為衛星部分誤差、信號傳播誤差、接收機的誤差以及其他誤差。由于手持GPS接收機在接收衛星信號的時候,并未進行的差分的改正,所以精度較低,可以作為地質填圖或者小比例的物化探采樣工作[4]。一般在平原里區平面定位精度誤差為2m左右,中午時衛星數少,可能會對精度略有影響。
2.1 手持GPS接收機的參數
手持GPS接收機的參數分為DX、DY、DZ、DA和DF,前三個參數需要在實際工作中計算,也就是我們通常所說的三參數,而后兩個參數(DA和DF)在對于某一個坐標系統來說,它的數值可以認為是固定不變的,例如在北京54坐標系統中△A=-108、△F=0.0000005,在西安80坐標系統中△A=-3、△F=0。
2.2 參數計算方法
手持GPS的參數計算,無非是利用公共點的兩套坐標計算坐標轉換參數,通過手持機內置的軟件,對采集的WGS-84坐標進行轉換得到需要的測區坐標系統。通常的參數計算方法有三參數法和七參數法以及高程擬合法,下面分別加以說明。
2.2.1 三參數方法
三參數法是在測區的控制點上采集該點的WGS-84坐標并利用已有控制點的坐標進行計算獲取DX、DY、DZ的平移參數,它的精度比較低,沒有考慮到尺度變換因子。原理是將公共點的坐標轉換成空間直角坐標,進行簡單的平移,計算轉換參數,轉換的模型如下:
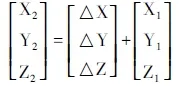
轉換模型中,X1,Y1,Z1和X2,Y2,Z2分別為某一點在兩個不同坐標系中的坐標,ΔX、ΔY、ΔZ某一點從一個坐標系轉換到另一個不同坐標系平移參數,這套坐標轉換模型只需要一個公共點就可以計算三參數。
2.2.2 七參數法
七參數法是分別在工作區的3個控制點上采集WGS-84坐標和已有控制點的坐標進行計算,得到3個平移參數、三個旋轉參數和1個尺度參數,轉換模型為布爾沙模型,如下圖:
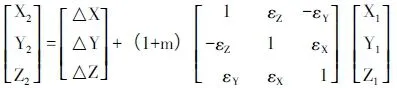
式中X1,Y1,Z1和X2,Y2,Z2分別為某一點在兩個不同坐標系中的坐標,ΔX、ΔY、ΔZ為平移參數,εX、εY、εZ,為旋轉參數,m為尺度參數。七參數法至少需要三個公共點進行坐標轉換,用最小二乘法進行約束平差,來便于提高局部范圍內的參數求解精度[5]。由于七參數轉換模型比三參數進行轉換更嚴密精度更高,而采用低精度公共點的坐標求得的轉換參數,會對觀測精度有較大影響,大范圍內進行坐標轉換時,隨著測點與公共點之間距離增加,誤差逐漸增大。
2.2.3 GPS高程擬合
GPS的高程擬合就是利用手持機測定的大地高通過計算高程異常來得到正常高的方法。這就需要的到公共點的水準高程通過公式H=h+ζ(H為大地高、h為正常高、ζ為高程異常)。高程異常也可以通過對似大地水準面的擬合來得到,在水準面精華模型中,通過內插法可以得到各點的高程異常值。
3 工程應用
本次項目工作區位于青海省中部柴達木盆地,屬于青海省地質勘查項目。主要任務是進行1:10000土壤地球化學采樣工作。測網的密度100m×20m,測線方位0°,共布設測線40條,面積約5平方公里共計約51.8公里。
3.1 WGS-84坐標采集
本次工作采用Garmin eTrex 20手持GPS接收機,定位精度2m~5m采集工作區內至少三個控制點的WGS-84坐標,點位應均勻分布,采集坐標時應將GPS接收機靜置在點位5分鐘~10分鐘。具體操作為,在坐標采集前,首先將要把手持GPS的坐標系統設置為WGS-84坐標系下,并讀取經緯度(B,L,H),然后將手持GPS接收機放置在已知的控制點上,等待數據讀數穩定后讀取坐標值。
3.2 參數計算
七參數的模型比三參數的模型計算更加嚴密精確,誤差更小。由于本次測量任務野外測點采樣的精度要求不是太高(平面定位誤差在5m~10m之內),所以采用三參數法進行坐標轉換。
首先在計算三參數前,應首先輸入本地的中央子午線,并且設置好橢球參數和坐標系統,將采集的WGS-84坐標和本地高斯平面直角坐標分別輸入參數計算軟件,即可得到工作區的三參數[6]。將得到的三參數輸入手持GPS內,到另一已知控制點上進行點位的檢校,如果殘差滿足精度要求,即可進行點位坐標的采集。采集三個點計算的三參數下:
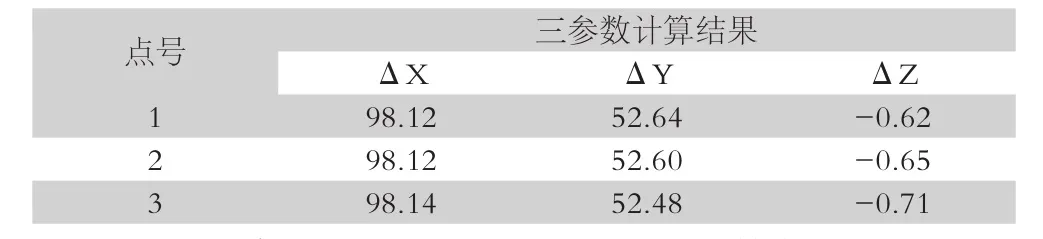
表1 三參數的計算結果
這里需要注意的是GPS的三參數不是固定不變的,不同的地方,不同的計算方法計算出來的三參數是不一樣的。而且在某一個點上計算的三參數,如果里這個點越遠,GPS的定位精度越差,在距離測區20公里以外的某已知點上,三參數分別為ΔX=98.39,ΔY=51.88,ΔZ=-1.16,所以最好選擇測區周圍均勻分布的3個已知點,進行三參數的計算后取平均值。
一般來說大概距離已知點20公里左右,手持GPS測量的誤差大概會增加2m左右,衛星信號質量的好壞,多路徑效應也會影響手持GPS接收機的精度。所以建議一般距離20公里左右,重新計算一次三參數。
3.3 參數檢核
將計算好的三參數輸入手持GPS接收機后,在工作區的其他三個控制點上進行了精度檢核。通過檢核分析經過三參數改正以后在20公里的作業區半徑內,平面誤差的精度小于4m,高程誤差略大一些小于5m。在測網邊緣的控制點上進行檢核,平面誤差不大于5m,高程誤差不大于9m。
3.4 精度分析
影響手持GPS精度主要因素,在獲取的大地高這里會有較大的差別。雖然規范規定了手持GPS接收機定位誤差中沒有高程分量的誤差,但是在坐標系統的轉換中大地高的確參與了其中的計算[7]。而且誤差的大小直接影響定位精度。不同的接收機大地高測量的數值也不相同,有的甚至會有將近10m的誤差,如果直接使用這個大地高數據進行三參數計算,即便經緯度測量的值精度在高,也會影響最后的定位精度,所以現在的主要問題在于如何更準卻的工作區的大地高數據。
如果工作區內布設過控制網,則可從平差報告中得到準確的大地高數據,從而計算三參數。如果工作區內無法得到已知點的大地高,則只能在已知點上觀測得到大地高,可以對已知點進行多次測量取平均值得方法得到大地高數據。
4 小結
通過已知控制點的經緯度和工作區的高斯平面直角坐標,通過坐標系統的轉換,最后求得了地心空間直角坐標系和工作區平面直角坐標系之間轉換的參數,即三參數。通過計算的三參數輸入到手持GPS中,在滿足作業任務精度的前提下,大大的提高了作業效率。但是在實際的工作中也應該注意到,影像手持GPS精度的最重要的問題還是在于如何更精準的獲取大地高H。隨著GNSS多系統的應用,手持GPS接收到的衛星越來越多,特別是我國現在已經比較健全的北斗系統,在加上廣域差分技術的應用,未來相信手持GPS接收機的精度將會越來越高,越來越好的服務于工程建設。
