高速狀態下伺服隨動控制系統設計與實踐
2020-03-25 15:14:27黃曉偉
價值工程 2020年4期
黃曉偉
摘要:本文通過采用三菱電機FX5-40SSC-S簡易運動控制模塊、FX5U系列可編程控制器、MR-J4W2-22B型伺服放大器和SSCNETⅢ光纖連接,設計了一種X-Y雙軸伺服隨動控制系統。通過PLC的程序算法設計,實現了X-Y雙軸伺服運動機構控制機構跟隨一個可變頻調速的轉盤同步運行,在運動的轉盤上實現預設的動作要求,該設計方案對實際應用具有一定的參考價值。
Abstract: This paper designs an X-Y dual-axis servo follow-up control system by using Mitsubishi Electric FX5-40SSC-S simple motion control module, FX5U series programmable controller, MR-J4W2-22B servo amplifier and SSCNETⅢ optical fiber connection. Through the programming algorithm design of the PLC, the XY dual-axis servo motion mechanism control mechanism is synchronized to follow a variable-frequency speed-adjustable turntable to achieve preset motion requirements on the moving turntable. This design scheme has certain reference value for practical application.
關鍵詞:伺服隨動;三菱PLC;簡易運動控制模塊;SSCNETⅢ連接
Key words: servo-suite;Mitsubishi PLC;simple motion control module;SSCNETⅢ connection
中圖分類號:TP275? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)04-0220-04
0? 引言
在工業自動化控制系統中,伺服電機控制系統是最常見的電氣控制系統之一,它常常針對自動化系統中的位置、角度和轉速進行高精準、快響應、超穩定的控制。而在伺服控制系統中,能進行隨動控制,讓伺服系統隨運動主軸或其他規律變化的運動信號而進行同步運行的系統在控制要求上又提出了進一步的要求。本文以三菱電機伺服控制系統為例,通過具體的控制要求,設計一套伺服隨動系統的解決方案,為伺服控制系統拓寬一下控制方式和控制思路。
1? 系統整體控制要求
在本項目中,具體的控制要求是:要在一個旋轉運動的圓盤上畫出一條半徑虛線。畫圓半徑虛線可以分解為伺服跟隨圓盤旋轉即兩者相對靜止,然后疊加畫虛線功能。①旋轉跟隨功能:畫筆要與不同半徑的圓盤旋轉線速度保持一致,即畫虛線半徑前,畫筆要跟隨圓盤運動,相對靜止。②畫半徑虛線功能:伺服系統實現跟隨功能后,要根據半徑的實時值,計算畫筆運動的切線速度,在圓軌道切換時,通過控制電磁鐵的通斷來畫出圓的半徑虛線。
2? 控制系統模型設計
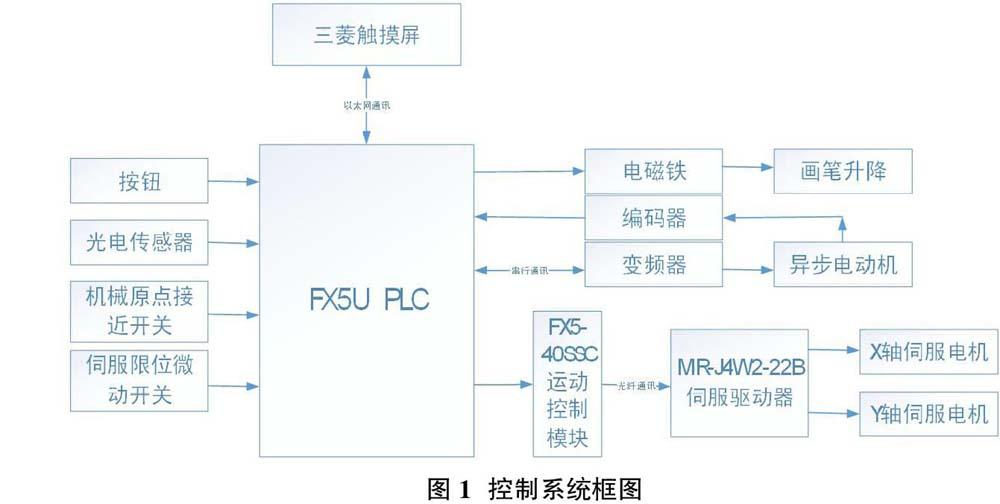
控制系統的主要器件全部選用三菱品牌,核心控制器選擇三菱FX5U PLC,增加FX5-40SSC-S簡易運動控制模塊,模塊直接通過SSCNETⅢ連接伺服驅動器,可以方便實現對伺服電機的運動控制。伺服驅動器選擇MR-J4W2-22B型,自帶SSCNETⅢ/H型接口,該驅動器能直接驅動兩臺伺服電機,可以連接兩臺200W以下的伺服電動機,實現雙軸的各種插補運行。變頻器選擇FR-E740-0.75K、觸摸屏選擇GS2017-WTBD。控制系統的結構框圖如圖1所示。
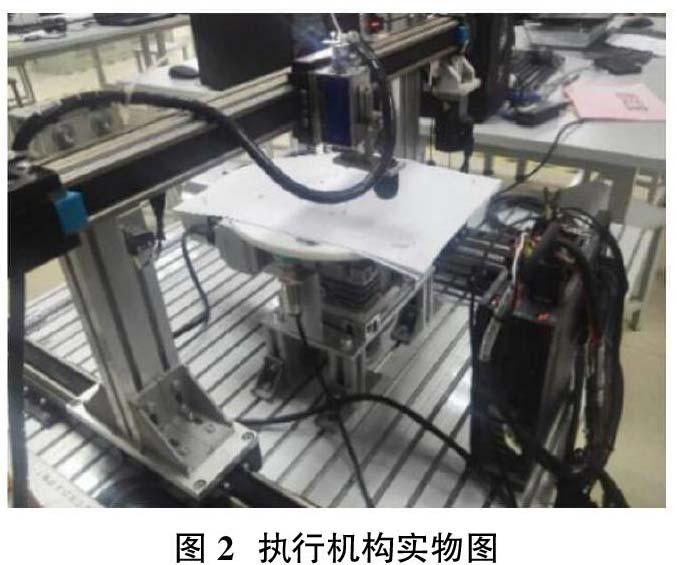
3? 執行機構硬件設計
設計了系統的執行機構,其實物圖如圖2所示。在該機構中,由2個伺服電機帶動同步帶,組成XY軸十字工作臺,軸上各裝有原點、左右限位傳感器;電磁鐵安裝在龍門架上,控制畫筆的升降運動;三菱變頻器驅動異步電動機,經減速器驅動圓盤轉動;圓盤轉軸的下方裝有測速用的旋轉編碼器;圓盤下方裝有圓盤檢測零點、用作觸發信號的接近開關。
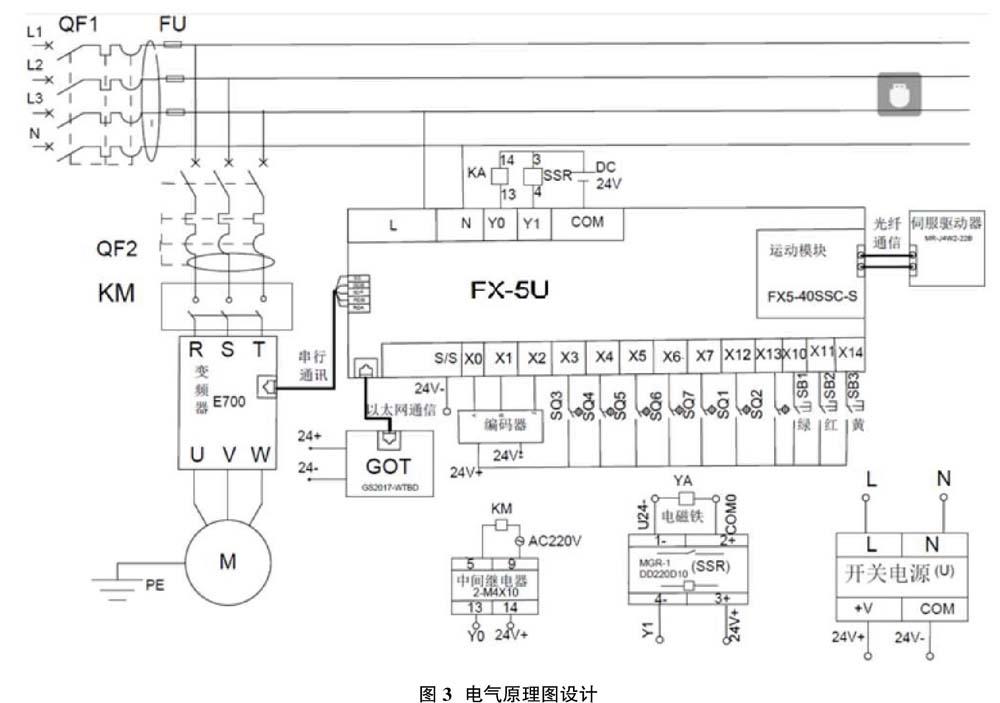
4? 電氣原理圖設計
控制系統的電氣原理圖設計如圖3所示。
5? 程序及軟件設計
根據控制要求,可以通過旋轉平臺下的編碼器進行測速,以一定時間內轉過的角度θ為基準,可以獲得圓盤旋轉的角速度ω,雙軸控制的畫筆移動速度v,時間為t,則可以以圓盤中心為原點建立極坐標系(θ,ρ)。在極坐標系下,畫筆在旋轉圓盤上畫一條從圓心出來的直線r只要符合以下方程組:
5.1 系統控制流程設計
按照控制要求,在系統啟動后,首先要返回到X軸和Y軸的原點,然后跑到圓心。接下來啟動變頻器,圓盤轉動,編碼器進行測速,圓盤零點開始檢測,當達到零點時進行半徑的切換,在切換過程中完成線段的劃分。
5.2 伺服參數系統設置
在GX Works3軟件中,必須在工程中對FX5-40SSC-S簡單運動控制模塊進行功能設置。原點回歸方式選擇:近點DOG型,原點回歸方向為:正方向(地址增加方向)。
然后,在軸1中對軸2進行插補設置,如圖6所示,插補對象軸為軸2,跑直線時選擇ABS直線插補,跑圓弧時選擇INC圓弧插補,插補設置完成后,可以通過離線模擬進行查看和修正。如圖7所示。
5.3 變頻器參數設置
變頻器設置參數主要為通信模式修改設置。參數設置表如表1所示。
5.4 人機界面設計
人機界面設計主要有以下幾個設置按鈕:回原點Origin按鈕,變頻啟停Start、Stop按鈕,系統開始運行START按鈕。輸入框為:并平齊運行頻率設置。顯示框為:AX1軸1位置和AX2軸2位置顯示,變頻器輸出頻率、輸出電流、輸出電壓顯示等。(圖8)
6? 系統整體調試
系統整體調試步驟如下:
①回原點:伺服使能上電,回XY軸平臺原點。②找圓心:伺服使能失電,單獨啟動變頻器驅動圓盤旋轉,手動下降畫筆,通過畫圓找到準確的圓心,記錄此時的圓心坐標輸入程序。③轉速運算:按設定頻率啟動變頻器,通過旋轉編碼器采集高速脈沖,計算得出減速電機的實時轉速,并實時顯示。④測試效果:按操作步驟測試后發現變頻器的最佳運行頻率為18Hz。在該運行頻率下,雙軸伺服系統的隨動運行效果最佳。
7? 總結
本系統理論設計上完全符合控制要求和任務,實際運行效果好。但也存在一些問題,主要是由于電磁鐵帶動畫筆部分機械結構和旋轉圓盤平整度有一定偏差,所以開始切入和離開部分有毛刺,拖痕較明顯,繪畫質量不十分理想。
參考文獻:
[1]張磊.基于PLC和伺服控制器隨動跟蹤量化計算方法[J].自動化技術與應用,2019(04):74-76.
[2]林杰文,吳亦鋒.基于PLC的伺服電機運動控制系統設計[J].機電技術,2015(05):20-23,26.
[3]胡志剛.基于三菱PLC的伺服電機控制系統設計[J].價值工程,2017,36(05):80-81.