基于BP神經網絡的高速動車組網絡控制系統時延研究
2020-03-24 08:47:55宋程王元東徐濱全
科技創新與應用 2020年9期
宋程 王元東 徐濱全


摘? 要:當前,高速動車組的控制系統迅速向網絡化與智能化方向發展,網絡控制系統已被大規模地應用于高速動車組的控制系統之中,網絡控制系統可實時地傳輸高速動車組中各個設備的數據并監控高速動車組的運行狀態,以保證高速動車組安全地運行。但高速動車組的通信網絡控制端口和變量數目非常多且各端口的長度與特征周期也各異。故高速動車組的網絡控制系統在輸出數據的時候,不可避免地出現網絡時延現象,該現象嚴重地威脅著高速動車組網絡控制系統的實時性和穩定性。由于高速動車組的網絡控制系統是一種非線性系統,故文章針對帶有時延問題的高速動車組非線性網絡控制系統,提出一種有效的優化方法,即將BP神經網絡遞推預測與廣義預測控制結合起來,先根據BP神經網絡遞推預測的方法對網絡控制系統未來的輸出進行預測,然后利用遞推最小二乘法對網絡控制系統未來時刻的系統參數進行辨識,將非線性網絡控制系統在每一時刻進行線性化處理,最后由廣義預測控制算法補償非線性網絡控制系統的時延且對所提出的方法進行實驗仿真,實驗結果表明:該方法可有效地消除高速動車組網絡控制系統的時延,同時具有實時性高、計算速度快及魯棒性強等優點,顯著地優化了帶有時延問題的高速動車組非線性網絡控制系統。
關鍵詞:BP神經網絡;廣義預測控制;遞推最小二乘法;高速動車組;網絡時延
中圖分類號:TP39 ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)09-0001-05
Abstract: At present, the control system of high-speed EMU is rapidly developing in the direction of networking and intelligence, and the network control system has been widely used in the control system of high-speed EMU. The network control system can transmit the data of each equipment in the high-speed EMU in real time and monitor the running status of the high-speed EMU, so as to ensure the safe operation of the high-speed EMU. However, the communication network control ports and variables of high-speed EMU are very large, and the length and characteristic period of each port are also different. Therefore, when the networked control system of high-speed EMU outputs data, the phenomenon of network delay is inevitable, which seriously threatens the real-time performance and stability of the networked control system of high-speed EMU. Because the networked control system of high-speed EMU is a kind of nonlinear system, this paper proposes an effective optimization method for the nonlinear networked control system of high-speed EMU with time delay, that is, combining BP neural network recursive prediction with generalized predictive control, firstly, the future output of networked control system is predicted according to the recursive prediction method of BP neural network. Then the recursive least square method is used to identify the system parameters of the networked control system in the future, and the nonlinear networked control system is linearized at every moment. Finally, the time delay of the nonlinear networked control system is compensated by the generalized predictive control algorithm, and the experimental simulation of the proposed method is carried out. The experimental results show that this method can effectively eliminate the time delay of the networked control system of high-speed EMU. At the same time, it has the advantages of high real-time performance, fast computing speed and strong robustness, which significantly optimizes the nonlinear networked control system of high-speed EMU with time delay.
Keywords: BP neural network; generalized predictive control; recursive least square method; high-speed EMU; network delay
1 概述
隨著中國高速鐵路的快速發展,高速動車組網絡控制技術有了巨大的突破。雖然傳統的控制系統已在工業上得到了廣泛地應用,但其發展空間已達到極限,故迫切地需要一種數據傳輸可靠且能實時地進行控制的網絡系統。列車通信網絡(TrainCommunicationNet,TCN)應運而生,1999年國際電工委員會通過的標準成為動車組控制網絡系統設計的主流[1]。為實現精準且實時地控制,TCN網絡利用過程數據來進行周期性地更新。對于非緊迫的且數據量過大的數據,TCN網絡使用消息數據來進行數據的有效傳輸。相比于傳統的工業控制系統,高速動車組網絡控制系統對傳輸數據的實時性要求極高,但高速動車組通信網絡控制端口和變量非常多且各端口的長度和特征周期也各異。故數據在傳輸的過程中不可避免地產生網絡時延現象,這極大地影響了高速動車組網絡控制系統的安全性。
本文研究了帶有時延現象的高速動車組網絡控制系統,提出了一種有效的優化方法,即將BP神經網絡遞推預測與傳統的廣義預測控制結合起來,以優化高速動車組網絡控制系統且對所提出的方法進行實驗仿真,實驗結果對高速動車組網絡控制系統的設計具有重要的意義。
2 高速動車組通信網絡結構
中國標準動車組網絡控制系統遵循GB/T 28029.1-2011標準,高速動車組網絡控制系統采用兩級總線式拓撲結構,分為動車組級總線WTB和車輛級總線 MVB,布設以太網來實現軟件更新及數據下載[2]。通過制定動車組級及車輛級通信協議,實現對高壓、牽引等系統在內的整車邏輯控制、狀態監視、故障診斷,并實現互聯互通。將TCN網關作為動車組級和車輛級的數據轉換器,高速動車組通信網絡結構如圖1所示。高速動車組不同牽引單元的重要數據通過WTB總線進行通信并把數據傳輸給中央控制單元處理,高速動車組的關鍵子系統與中央控制單元之間的數據交換是通過MVB總線與輸入輸出模塊來實現的。高速動車組同時采用以太網作為總線,通過各車廂的以太網交換機與顯示屏、無線傳輸裝置等設備相連接來實現數據的交換。
3 高速動車組網絡時延產生的原因和分類
高速動車組網絡控制系統對實時傳輸數據的要求極高,但實時控制一般采用過程數據傳輸,把變量周期性地置于控制單元之間發送且高速動車組通信網絡控制端口與變量的數量非常多,此外各端口的長度及特征周期也各異[3]。故在數據傳輸的過程中會不可避免地產生網絡時延現象。這對高速動車組網絡控制系統的實時性與穩定性產生了嚴重的威脅,產生網絡時延的主要因素有:網絡帶寬受限、網絡信息源過多、數據碰撞及網絡負載的隨機變化。把網絡時延定義為:一個報文或分組從網絡的一端傳輸至另一端所需的時間。以下分別介紹幾種時延并分析。
(1)發送時延。發送時延是指計算機或路由器把數據包全部傳輸至傳輸媒介中所需的時間。(2)傳播時延。數據通過傳播媒介的時間稱為傳播時延,網絡的傳播時延的大小與其傳播距離正相關。(3)處理時延。在高速動車組網絡控制系統中,計算機和路由器都需要對接收到的數據進行處理,所消耗的時間稱為處理時延。網絡傳輸數據越多,處理時延就越大。(4)排隊時延。數據通過網絡傳輸的過程中,需經過許多不同的路由器,但路由器不能同時處理發送的數據,故數據需在路由器中排隊等待,所消耗的時間稱為排隊時延。
根據以上分析可知:網絡時延=傳播時延+發送時延+處理時延+排隊時延
4 BP神經網
BP神經網絡是一種帶有反饋通道且可自我學習的神經網絡。BP神經網絡最基本的算法是梯度下降法[4],其原理為:為了提高整個BP神經網絡的準確率,將實際輸出與期望輸出相比較,若兩者的誤差較大,就開始反向傳播,從而不斷地更新BP神經網絡連接的權值,直到兩者的誤差在預先設定的范圍內。
4.1 BP神經網絡正向通道算法
用N個樣本訓練BP神經網絡,當前時刻使用p個樣本對BP神經網絡進行訓練,樣本P由輸入層到隱含層第i個神經元的輸入是:
5 廣義預測控制
廣義預測控制是指系統先通過預測、校正及優化后輸出一個控制量,再采集系統下個時刻的輸出且不斷地重復上述步驟,實時地控制系統,最終達到確保控制系統穩定運行的目的[6]。對系統進行預測控制且不斷地提高高速動車組運行的穩定性及安全性,本文選擇受控自回歸積分滑動平均模型作為廣義預測控制模型,該模型可表示為[7]:
式(5-20)為狀態空間形式的廣義預測控制規律。在上述廣義預測的算法之中,由于在模型的預測中實際值與預測值可能不一樣,故在控制的過程中只對當前時刻進行控制且把當前時刻的控制值與系統上個時刻的預測值進行比較,通過誤差對模型預測值進行校正,重復上述步驟可不斷地優化和校正。故在控制系統受到外界因素的干擾或期望值與預測值的誤差較大時,反饋會校正控制系統。廣義預測控制有效地克服了系統中不確定性所帶來的影響,增強了系統的控制性能,對高速動車組網絡控制具有重要的意義。
6 遞推最小二乘法辨識
遞推最小二乘法辨識,主要可分為:在線辨識和離線辨識,在線辨識是指實時地獲取控制系統中的數據且利用遞推最小二乘法對系統中各參數進行辨識,且實時地對系統中的參數進行更新、不斷地減小參數的誤差,使其不斷地接近目標值[8]。離線辨識是指先獲取系統中所有數椐,然后再進行辨識但系統的參數不會實時地更新[9]。在線辨識相比較于離線辨識,在線辨識可實時地修正辨識參數,故在高速動車組網絡控制系統中選用在線辨識更具有優勢。
7 BP神經網絡遞推預測與動車組非線性網絡控制系統
7.1 BP神經網絡遞推預測
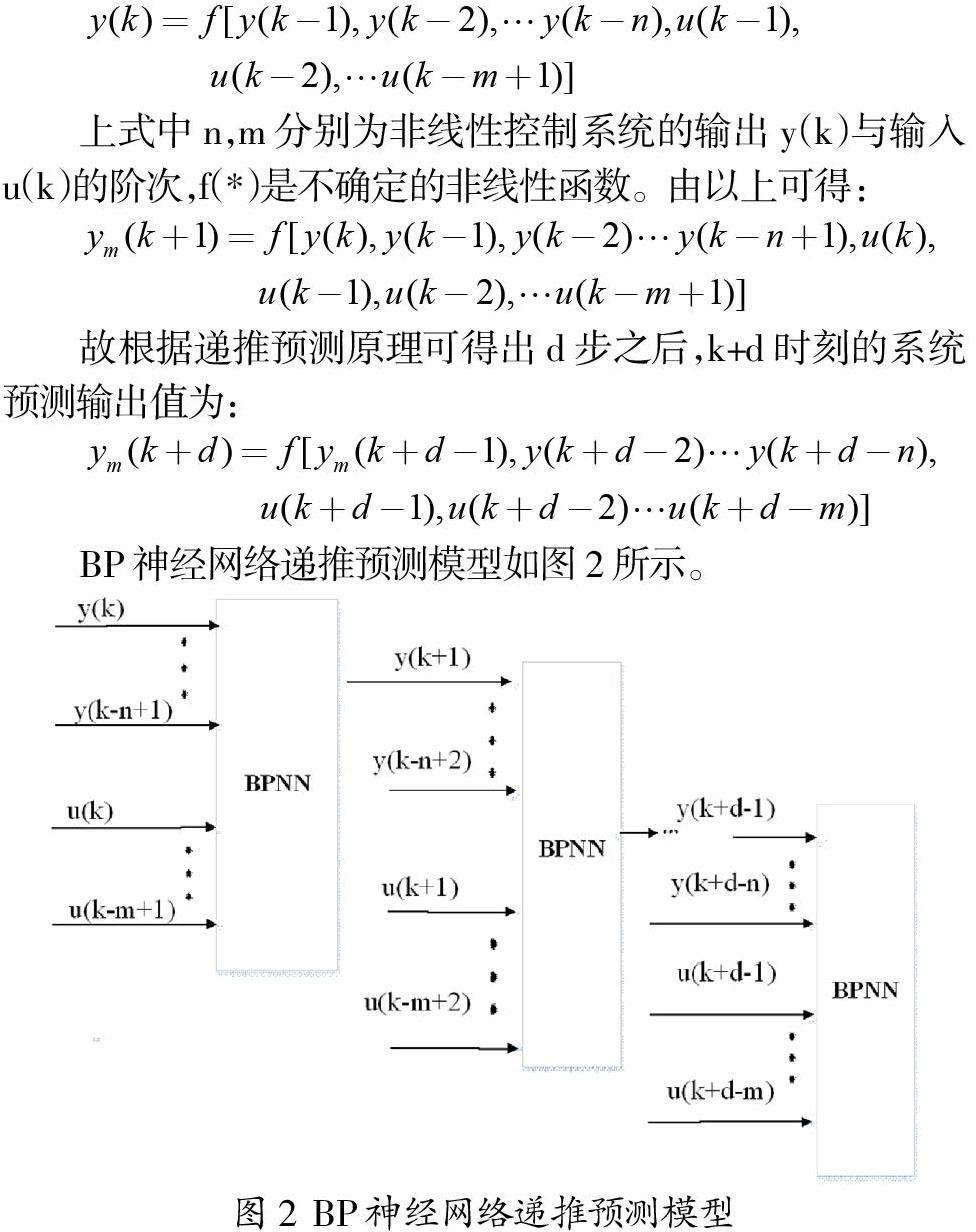
通常非線性模型用離散時間數學模型可表示為:
上式中n,m分別為非線性控制系統的輸出y(k)與輸入u(k)的階次,f(*)是不確定的非線性函數。由以上可得:
故根據遞推預測原理可得出d步之后,k+d時刻的系統預測輸出值為:
BP神經網絡遞推預測模型如圖2所示。
圖2 BP神經網絡遞推預測模型
選用BP神經網絡最主要的原因是BP神經網絡能較準確地逼近非線性模型,能表示出無法用數學函數描述的非線性系統[10],且多步遞推預測具有良好的準確性與實時性。
7.2 高速動車組非線性網絡控制系統
本文將BP神經網絡遞推預測與廣義預測控制結合起來,以解決高速動車組中非線性網絡控制系統的時延問題。傳統的廣義預測控制適用于線性系統且對網絡控制系統中常見的時延具有良好的補償作用[11],但高速動車組的網絡控制系統為非線性系統,故須先根據BP神經網絡遞推預測的方法對控制系統未來的輸出進行預測,然后利用最小二乘法對系統未來時刻的系統參數進行辨識,將非線性系統在每一時刻進行線性化處理,最后由廣義預測控制算法補償時延對非線性網絡控制系統的影響。高速動車組非線性網絡控制系統框圖如圖3所示。
由于高速動車組網絡控制系統對實時性要求較高,故BP神經網絡預測部分及遞推最小二乘法部分均是按照時間順序進行的,遞推算法的思想為:當前時刻的計算值等于前一時刻或前幾個時刻的計算值與修正項之和。
8 實驗仿真與結果分析
8.1 高速動車組制動模型
8.2 BP神經網絡遞推預測的建立與訓練
本文所采用的基本網絡為BP神經網絡,對高速動車組制動模型進行數據采集并制成數據集,用所得數據集對BP神經網絡進行訓練。把當前時刻及上一時刻的速度輸入BP神經網絡之中,把下一時刻的速度作為輸出,創建一個三層的BP神經網絡。隱含層的激活函數為tansig函數,輸出層的函數為purelin函數。隱含層神經元設置過多或過少產生的現象分別是:BP神經網絡收斂過慢、BP神經網絡的輸出結果與實際輸出的誤差較大。故需對不同數量的神經元進行測試,精度取0.001,把隱含層神經元的數量分別設置為10、30、50、100,通過上面的模型可得500個數據,450個數據作為訓練集,50個數據作為測試集,測試的參數為:運行時間的最大值、實際輸出與期望輸出之間的誤差及單次數據處理所需要的時間。實驗結果如表1所示。
表1 BP神經網絡神經元個數測試實驗
由表1可知,100個比10個神經元的BP神經網絡運行時間的平均值要大0.83ms,但誤差的平均值要遠小于10個神經元的BP神經網絡。當BP神經網絡的神經元個數由30變為50時,BP神經網絡實際輸出與期望輸出之間的誤差減小,這說明隱含層神經元個數越多,誤差越小。但BP神經網絡的處理速度也會變慢。在高速動車組上采樣周期一般為64ms,故隱含層神經元個數選為50。依據不同工作區間再分別取100組數據,共采集數據500組,450組數據為訓練集,50組數據為測試集。訓練步長取1000,性能指標取0.1%,學習速率取為10%。
8.3 高速動車組非線性網絡控制系統仿真
為驗證本文所提出的方法的有效性,將已訓練好的BP神經網絡加入到非線性網絡控制系統中進行仿真。對有無時延補償進行對比實驗,驗證時延補償的有效性。把方波信號作為目標信號,加入特征周期為64ms時,測試得到的時延數據,任務周期和采樣周期分別為50ms與64ms。分別對加入時延補償和未加入時延補償的非線性網絡控制系統進行仿真。無時延補償的BP神經網絡遞推預測控制效果如圖5所示。由圖5可知,在對方波信號的跟蹤過程之中,存在較大的誤差、波動較大且對目標信號的跟蹤不穩定,控制系統整體的控制性能不理想。
有時延補償的BP神經網絡遞推預測控制效果及誤差如圖6與7所示。由圖6和7可知,在跟蹤方波的實驗過程中,加入時延補償后控制系統在初始階段會出現一個非常短暫的振蕩,但之后便可較快、較穩定地跟蹤方波目標信號且誤差波動的幅度較小,相對穩定,在穩定階段最大誤差小于±3。故加入時延補償可較好地提高系統的控制性能。
9 結束語
本文將BP神經網絡遞推預測與廣義預測控制結合起來,可有效地消除高速動車組非線性網絡控制系統的時延現象且利用MATLAB軟件對所提出的方法進行實驗仿真,實驗中對比了有無時延補償對非線性網絡控制系統控制性能的影響。本文的實驗證明了所提出的方法具有抑制時延效果好且實時性高、控制效果好、計算速度快及魯棒性強等優點,對高速動車組非線性網絡控制系統的設計具有重要的參考價值。
參考文獻:
[1]Tindell K, Bruns A, Wellings A J. Caclulating Controller AreaNetwork(CAN) Message Respnese Times[J]. Control Eng. Practice,1995,3(8):1163-1169.
[2]G.-B. Huang,Q.-Y. Zhu, and C.-K. Siew,"Extreme learning machine: A new learning scheme of feedforward neural networks," in In Proc. International Joint Conference on Neural Networks (IJCNN'2004), (Budapest, Hungary), July 25-29,2004.
[3]倪文波,王雪梅.高速列車網絡與控制技術[M].西南交通大學出版社,2010.
[4]G.E. Hinton, N. Srivastave, A. Sutskever, I. Sutskever, and R.R. Salakhutdinov. Improving neural networks by preventing co-adaptation of feature detectors. arXiv:1207.0580, 2012.
[5]LIAN F L, Moyue J R,Tibury D M. Network design consideration for distributed control systems[J]. IEEE Trans on Contr Syst Tech, 2002,10(2):297-307.
[6]王巖,孫增圻.網絡控制系統分析與設計[M].北京:清華大學出版社,2009.
[7]Liman Yang, Yunhua Li, Guilin Yang. Analysis of Delay and TrafficLoad in Networked Control System [C]//Proceedings of the 2005IEEE/ASME International Conference on Advanced Intelligent Mechatronics. USA: IEEE/ASME, 2005: 1425-1430.
[8]LI H B,CHOW M Y.EDA-based speed control of a networked DC motor system with time delays and packet losses[J]. IEEE Transactions on Industrial Electronics,2009,56(5):1727-1735.
[9]Hespanha J P, Naghshtabrizi P, Xu Y G: A survey of recentresults in networked control systems[J]. Proceedings of the IEEE,2007,95(1):138-162.
[10]龔利.鐵路機車遠程監測與故障診斷系統設計[J].計算機工程,2012,38(4):227-229.
[11]Fei-Yue Wang, Derong Liu, in:Networked Control Systems Theory and Applications, Springer Publishers, London(2008).