基于有向天線和RSSI 的藍牙無線定位基站設計
2020-03-24 03:49:38楊小青
智能計算機與應用 2020年11期
楊小青
(山西建筑職業技術學院 計算機工程系,山西 晉中 030619)
0 引言
精準定位是無線傳感器工作效率的重要指標之一,主流的無線定位技術主要基于測距算法和測角算法。測距算法的核心技術是測量各節點間的距離、信號強度。常用的定位算法有三邊測量法、三角測量法以及最大似然估計等。三邊測距技術包括:接收信號強度RSSI(received signal strength indication)測量法、到達時間ToA(time of arrival)測量法;而測角算法的思想是通過信號相位信息或多輸入多輸出天線,計算信號達到角AoA(angle of arrival)進行定位[1]。目前藍牙定位系統廣泛采用指紋法,該方法網絡布設簡易,但指紋采集需要耗費較大人力和較多時間[2]。為此,本文設計了基于有向天線和RSSI 的藍牙無線定位基站。
1 總體結構
藍牙定位基站設計思想及總體結構如圖1 所示。
藍牙無線定位基站的成功實現,關鍵在于信號的測量及準確獲取,使用四根定向天線,與水平面的定向角度分別為0°、90°、180°、270°,通過不同方向的天線,增強信號接收能力,并通過各方向信號的接收增益能力來獲取角度分辨力;中心處使用一根全向鞭狀天線來獲取均勻的空間增益,對接收到的信號強度輔助判定廣播定位節點的距離。
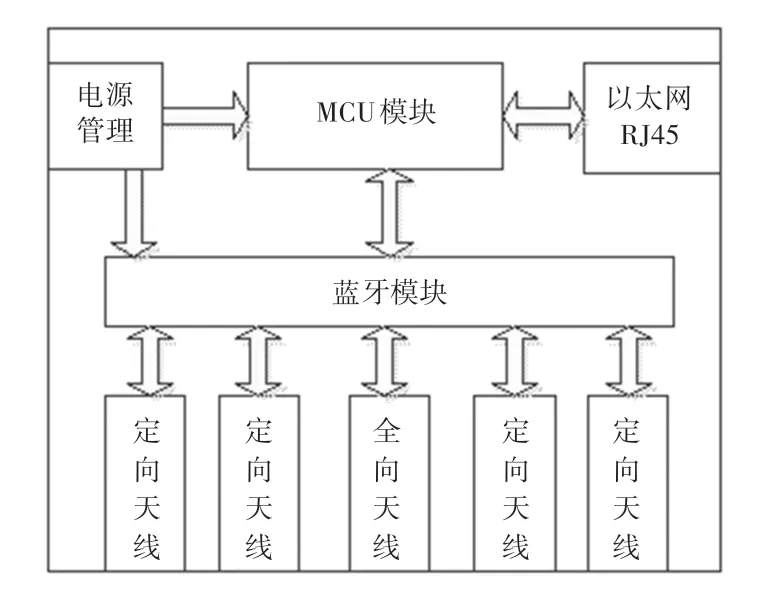
圖1 藍牙定位基站結構圖Fig.1 Diagram of BLE locating structure
藍牙模塊選擇符合BLE4.0 協議的低成本、低功耗的CC2541 芯片;廣播接收模式選擇私有模式[3]。與傳統標準協議相比,此模式廣播頻率高、接收RSSI 值更穩定。對于MCU 模塊,考慮到需要接收藍牙模塊UART 接口傳遞的RSSI 值,所以選擇STM32F1 系列實現定位算法,并以極坐標的形式通過RJ45 接口匯總至服務器平臺,供前端用戶進行位置展示。
2 天線設計
2.1 定向天線
定向天線的性能要求較強的方向增益、較低的主瓣寬度、較高的前后比等等。設計分別與水平面成0°、90°、180°、270°方向的4 根定向天線實現方向識別。
針對2.40 GHz~2.48 GHz 藍牙頻段,運用八木天線原理,設計一款小尺寸平板PCB 增益天線[4]。利用主流仿真軟件HFSS 建模,并進行增益、輻射方向圖等指標分析[5]。本設計中使用的PCB 八木天線尺寸為120 mm×100 mm,FR4 基板材質厚度1 mm,實現與藍牙模塊連接使用50 Ω 的SMA 接頭和同軸饋線。
3D 輻射增益圖如圖2 所示。其中YOZ 面的二維平面增益如圖3 所示。實驗過程中該天線的定向輻射性能較好,定向增益可達12 dB,水平主瓣波束寬度45°,進一步結合算法可以實現準確的信號測向。
2.2 全向天線
全向天線廣泛應用于無線通信領域,因其在水平面上全方向的均勻輻射特性、價格低廉的特點,本設計使用一根2.4GHz 具有4dBi 增益的全向鞭狀天線,利用全向天線接收的信號強度輔助進行距離判定。
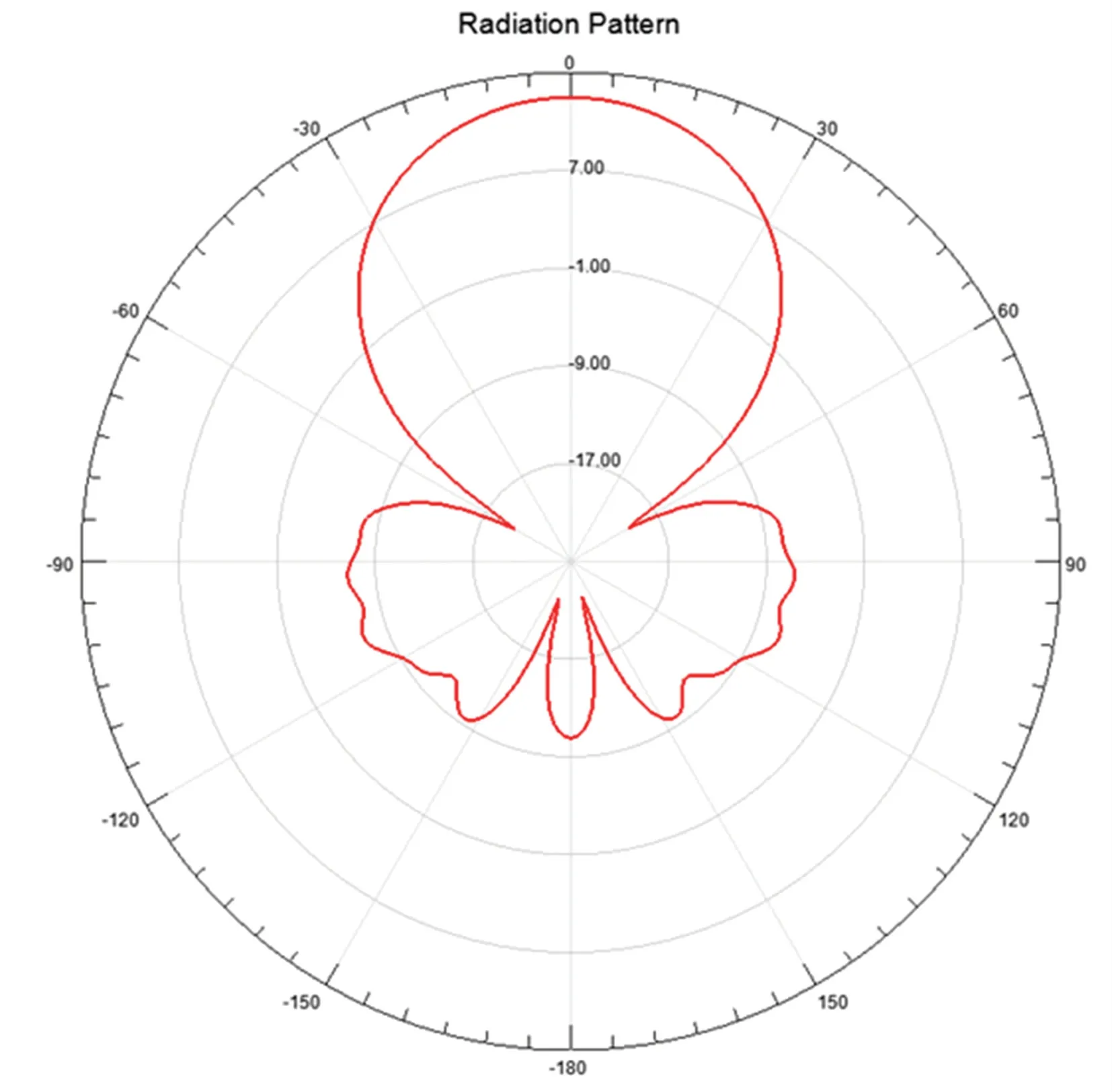
圖3 天線YOZ 面增益輻射曲線圖Fig.3 YOZ plane gain radiation pattern
3 算法設計
3.1 廣播節點的距離估計
實驗中利用全向天線接收的信號強度,估計藍牙廣播設備和定位基站的距離。主流的無線信號傳播模型包括Shadowing 模型、雙徑地面反射等模型,本設計中采用的是Shadowing 模型[6],該模型為:

其中,RSSId為接收到的信號強度;d為收發端的實際距離;d0 為參考距離;RSSId0是距離為d0 時的信號強度;n為信道衰減指數(由傳輸環境決定);Xσ是方差為σ、均值為0 的高斯隨機變量。
利用藍牙廣播手環進行周期廣播,當藍牙手環與定位基站距離不同時,準確測量全向天線接收到的信號強度,對數擬合后計算RSSI 值的公式為:

不同距離對應的信號強度關系曲線如圖4 所示。

圖4 RSSI 值與距離關系圖Fig.4 Relationship between RSSI and distance
3.2 廣播節點的AoA 角度估計
本設計AoA 角度估計使用四信道比幅測向法。其基本原理為:使用4 個定向天線、4 個藍牙接收模塊和1 個信號處理模塊組成,可實現360°全向測量。通過比較相鄰通道天線波束接收同一信號的幅度,來確定廣播節點的角度信息[7]。
從比幅測向系統的原理分析可以看出,角度測量校正必不可少[8]。將藍牙定位基站置于轉臺,精確控制轉臺角度,在一定距離外利用位置固定的藍牙廣播手環向定位基站進行信號廣播;按固定采樣時間和固定轉動角度增量,對廣播信號進行采集和存儲,并測量RSSI 值及各方向的幅度差,最終得到RSSI 幅度差值和角度AoA 的數據表。在實際使用中,已知廣播區間和RSSI 幅度差,即可以查找對應角度值。經過測算,得到ΔRSSI-AoA 的曲線如圖5 所示(其中A12表示天線A1、A2 的接收信號RSSI 差值)。
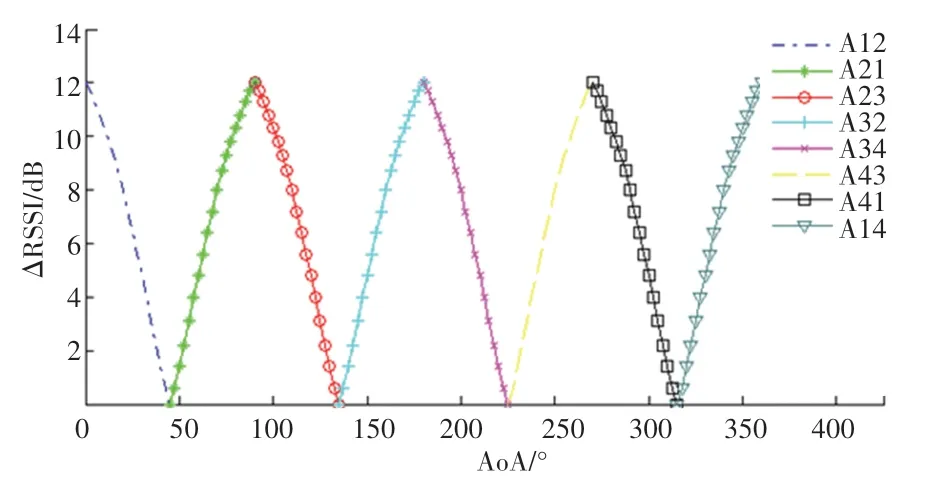
圖5 各區間天線組ΔRSSI 與AoA 關系圖Fig.5 Relation between Antenna pair ΔRSSI and AoA
4 實驗結果分析
為驗證本設計的定位精度與性能,選取空曠環境進行實驗。被定位節點使用一枚藍牙廣播手環,距離地面1.5 m 位置,使用三腳架固定藍牙定位基站,定位手環在距離定位基站分別為8 m、15 m 距離的圓周上進行驗證,結果如圖6 所示。
由測試結果可以得出,本藍牙定位基站定位誤差在1.5 m 左右。與現存藍牙定位方案相比,在保證同等的定位精度下,極大地減少了定位基站布設數量,具有以太網接口進行數據傳輸至服務器,免除了指紋采集等復雜的工作,增強了網絡布設簡便性、提高了網絡的可維護性。
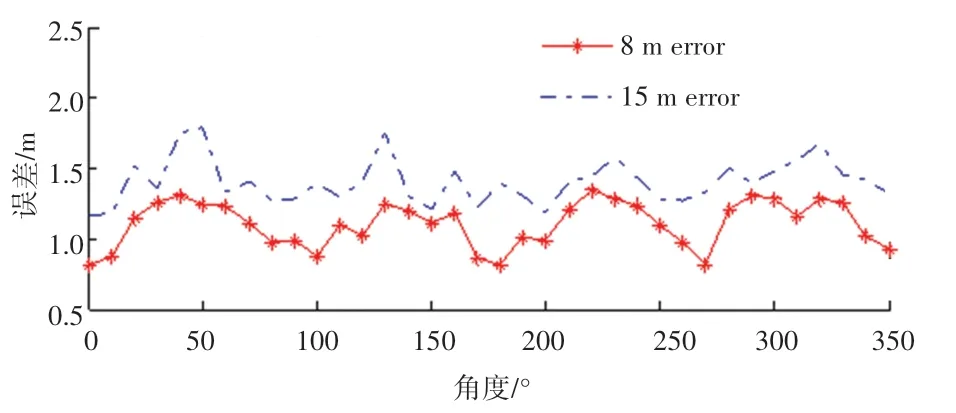
圖6 8 m 和15 m 時定位測試精度Fig.6 Location accuracy of 8 and 15 meters away
5 結束語
藍牙無線定位基站的成功實現關鍵在于信號的測量及準確獲取。本文基于此設計了一種基于有向天線和RSSI 技術的無線藍牙定位基站,并對系統硬件選擇進行介紹,對天線性能進行仿真分。利用全向天線接收的信號強度輔助進行距離判定,實現了信號到達角AoA 和距離的判定。實驗結果表明,該設計實現的定位誤差小,同時提高了藍牙定位系統精度,而且極大地簡便了定位網絡的安裝、調試和維護,降低了網絡布設的人力成本。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00