基于有限元法的山藥采挖機(jī)鏟刀的優(yōu)化設(shè)計(jì)
2020-03-23 13:33:40苗杰
農(nóng)機(jī)使用與維修 2020年2期
關(guān)鍵詞:優(yōu)化設(shè)計(jì)有限元
苗杰

摘 要:介紹了一種振動(dòng)式山藥采挖機(jī),通過Solidworks對(duì)機(jī)具的關(guān)鍵部位——挖掘鏟刀進(jìn)行了有限元分析和優(yōu)化設(shè)計(jì),保證了設(shè)計(jì)的強(qiáng)度要求,同時(shí)降低了部件重量,進(jìn)一步降低收獲阻力和機(jī)具成本。
關(guān)鍵詞:有限元;CAE;山藥采挖機(jī);鏟刀;優(yōu)化設(shè)計(jì)
中圖分類號(hào):S225.79文獻(xiàn)標(biāo)識(shí)碼:A開放科學(xué)(資源服務(wù))標(biāo)識(shí)碼
doi:10.14031/j.cnki.njwx.2020.02.005Open Science Identity(OSID)
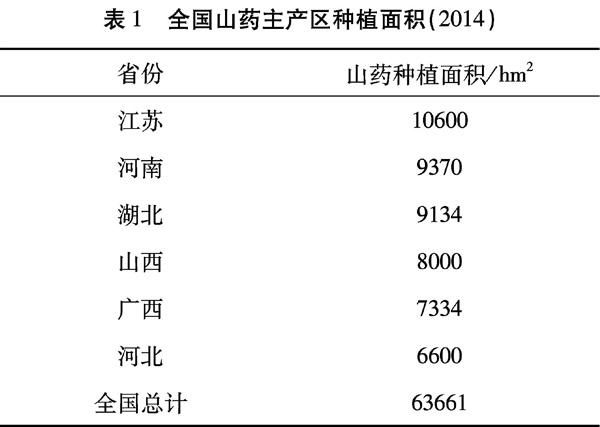
山藥具有重要的藥用價(jià)值和食用價(jià)值,我國山藥的種植歷史悠久,種植面積大,江蘇、河北、河南、山西、廣西是我國山藥主要產(chǎn)區(qū)(見表1)。發(fā)展山藥種植產(chǎn)業(yè)對(duì)于增加農(nóng)民收入,振興縣域經(jīng)濟(jì)具有重要的戰(zhàn)略意義。
由于山藥收獲的挖掘深度達(dá)1 m左右,一般收獲動(dòng)土量達(dá)1800~2100 m3·hm-2,勞動(dòng)強(qiáng)度大。因此山藥收獲尚無理想的作業(yè)機(jī)具,一般采用人工收獲,費(fèi)工費(fèi)力勞動(dòng)強(qiáng)度大,易鏟斷塊莖,制約了山藥產(chǎn)業(yè)的發(fā)展[1]。
本文介紹了一種山藥采挖機(jī),機(jī)具為懸掛式,通過挖掘鏟刀對(duì)土壤進(jìn)行割裂和碎土,振動(dòng)齒實(shí)現(xiàn)對(duì)土壤的振動(dòng)深松作用,滿足人工起拔山藥收獲的要求。為了保證設(shè)計(jì)效果,采用Solidworks中Simulation模塊對(duì)機(jī)具的關(guān)鍵部件——挖掘鏟刀進(jìn)行了有限元CAE分析,并進(jìn)一步進(jìn)行了優(yōu)化設(shè)計(jì)。
1 山藥采挖機(jī)總體結(jié)構(gòu)
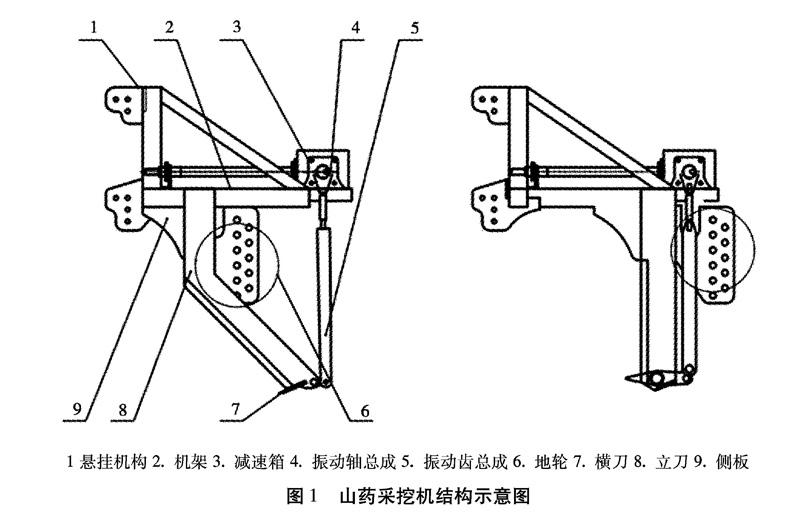
山藥采挖機(jī)根據(jù)立刀類型分為直立刀和斜立刀兩種,基本的結(jié)構(gòu)和傳動(dòng)方式均相同,如圖1所示。拖拉機(jī)通過懸掛結(jié)構(gòu)連接機(jī)具,后輸出軸與機(jī)具減速箱通過長(zhǎng)軸連接,工作時(shí)減速箱輸出軸將旋轉(zhuǎn)運(yùn)動(dòng)通過振動(dòng)軸總成轉(zhuǎn)化為連桿的往復(fù)擺動(dòng),進(jìn)一步實(shí)現(xiàn)振動(dòng)齒總成的往復(fù)振動(dòng),立刀和橫刀實(shí)現(xiàn)土壤的破土和割裂,將土壤和作物整體疏松,后續(xù)人工進(jìn)行起拔收獲。
2 鏟刀的設(shè)計(jì)
2.1 牽引阻力
鏟刀作為機(jī)具工作時(shí)的主要受力部件,承受了絕大多數(shù)的牽引阻力。因此首先要進(jìn)行機(jī)具整體的牽引阻力分析。參考犁的受力分析,機(jī)具的牽引阻力為
R=K0ab[2]
式中 R—牽引阻力(N);
K0—犁耕阻比;
a—耕深(cm);
b—單犁體幅寬(cm)。
考慮到山藥種植實(shí)際農(nóng)藝,取中等犁耕阻比K0=40 kPa;因收獲深度大于80 cm,取a=80 cm;此外,因設(shè)計(jì)要求b=50 cm,算出R=160 000 N。
2.2 鏟刀結(jié)構(gòu)
山藥采挖機(jī)工作原理與全方位深松機(jī)類似,鏟刀也采用相似的結(jié)構(gòu)設(shè)計(jì),區(qū)別在于山藥采挖機(jī)為平刀加橫刀組合,全方位深松機(jī)為V字形結(jié)構(gòu)。鏟刀組合結(jié)構(gòu)如圖2。
3 有限元仿真計(jì)算和優(yōu)化設(shè)計(jì)
3.1 有限元法概述
有限元方法(Finite Element Method)是力學(xué)、數(shù)學(xué)、物理學(xué)、計(jì)算方法、計(jì)算機(jī)技術(shù)等多種學(xué)科綜合發(fā)展的結(jié)合的產(chǎn)物。有限元方法的實(shí)質(zhì)是將復(fù)雜的連續(xù)體劃分成為有限多個(gè)簡(jiǎn)單的單元體,化無限自由度問題為有限自由度問題,將連續(xù)場(chǎng)函數(shù)的(偏)微分方程求解問題轉(zhuǎn)化為有限個(gè)參數(shù)的代數(shù)方程組求解問題。用有限元方法分析工程結(jié)構(gòu)的問題時(shí),將一個(gè)理想體離散化后,如何保證其數(shù)值的收斂性和穩(wěn)定性是有限元理論討論的主要內(nèi)容之一,而數(shù)值解的收斂性與單元的劃分及單元形狀有關(guān)。在求解過程中,通常以位移為基本變量,使用虛位移原理或最小勢(shì)能原理來求解[3]。
對(duì)于機(jī)械設(shè)計(jì)而言,有限元方法主要采用計(jì)算機(jī)CAE軟件進(jìn)行,工作流程包括建模、前處理(網(wǎng)格化、約束、載荷設(shè)置)、計(jì)算以及后處理和結(jié)果分析。主流的CAE軟件包括ANSYS、MSC MARC以及各種建模軟件如Solidworks等自帶的有限元分析模塊。
3.2 Solidworks Simulation模塊簡(jiǎn)介
Simulation模塊具有完全嵌入Solidworks中的一致、強(qiáng)大且直觀的仿真功能,設(shè)計(jì)人員可在設(shè)計(jì)過程的早期了解產(chǎn)品性能,避免成本高昂的過度設(shè)計(jì)。設(shè)計(jì)者只需在模型界面完成建模后,啟動(dòng)模塊,進(jìn)行適合的前處理工作,即可交由計(jì)算機(jī)進(jìn)行仿真案例的計(jì)算,最后輸出仿真結(jié)果。
3.3 鏟刀模型的前處理
完成鏟刀模型的制作后,即可進(jìn)入Simulation模塊進(jìn)行仿真分析。首先進(jìn)行前處理,包括材料設(shè)置、網(wǎng)格生成、約束和載荷的添加。鏟刀材料為65Mn;網(wǎng)格選擇四面體;由于立刀上半部分焊接在機(jī)架側(cè)板上,選擇對(duì)立刀的對(duì)應(yīng)焊接面添加固定約束;載荷為重力以及水平方向160 kN的牽引阻力,添加至立刀下半部分和橫刀的刀面。如圖3所示。
3.4 鏟刀的仿真后處理
運(yùn)行算例后,模塊進(jìn)行計(jì)算后得到模型的von Mises應(yīng)力、位移以及應(yīng)變,以云圖的方式顯示。鏟刀的von Mises應(yīng)力如圖4所示。可知應(yīng)力分布情況,最大應(yīng)力位于立刀固定位置下方。由于立刀焊接在機(jī)架上,此處相當(dāng)于簡(jiǎn)支梁結(jié)構(gòu),符合最大應(yīng)力的理論分布。
3.5 優(yōu)化設(shè)計(jì)
由圖4可知最大應(yīng)力為593 MPa,小于材料屈服應(yīng)力750 MPa。考慮到仿真直接將全部牽引阻力作為最大載荷進(jìn)行仿真,而實(shí)際工作時(shí)振動(dòng)機(jī)構(gòu)會(huì)在一定程度上減輕整體牽引阻力,因此該設(shè)計(jì)有較大的安全系數(shù),還可進(jìn)行鏟刀的優(yōu)化,減輕整體重量和尺寸,有利于節(jié)省制造成本。
由于最大載荷位于立刀,優(yōu)化設(shè)計(jì)主要針對(duì)橫刀的板厚進(jìn)行了調(diào)節(jié),分別取35 mm、30 mm、25 mm、20 mm進(jìn)行了多次仿真計(jì)算,對(duì)比最大應(yīng)力如表2所示。
可知橫刀板厚20 mm時(shí)最大應(yīng)力仍小于材料屈服應(yīng)力,考慮到實(shí)際工作可能出現(xiàn)的超負(fù)荷情況,橫刀應(yīng)取20~25 mm之間,有最佳性價(jià)比。
4 結(jié)論
本文在分析了一種新型的振動(dòng)式山藥采挖機(jī)牽引阻力后,對(duì)其關(guān)鍵部位挖掘鏟刀利用CAE技術(shù)進(jìn)行了有限元仿真校核和優(yōu)化計(jì)算,最終通過改變橫刀尺寸,減少了機(jī)具重量和加工成本。計(jì)算機(jī)有限元CAE技術(shù)的應(yīng)用,減少了理論計(jì)算工作量,對(duì)機(jī)具快速設(shè)計(jì)和驗(yàn)證提供了可靠依據(jù),縮短了機(jī)具研發(fā)周期,大大降低了農(nóng)機(jī)開發(fā)成本和試制試驗(yàn)風(fēng)險(xiǎn)。
參考文獻(xiàn):
[1]馮曉靜, 楊欣, 劉洪杰,等. 麻山藥收獲機(jī)械化技術(shù)現(xiàn)狀與對(duì)策[J]. 中國農(nóng)機(jī)化學(xué)報(bào), 2017(4).
[2] 中國農(nóng)業(yè)機(jī)械化科學(xué)技術(shù)研究院.農(nóng)業(yè)機(jī)械設(shè)計(jì)手冊(cè)[M].北京:中國農(nóng)業(yè)科學(xué)技術(shù)出版社.2007.
[3] DS SolidWorks公司.SolidWorks Simulation基礎(chǔ)教程[M].北京:機(jī)械工業(yè)出版社, 2014.
(03)
猜你喜歡
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
中國科技博覽(2016年22期)2016-11-01 13:48:02
中國科技博覽(2016年19期)2016-10-19 12:24:15
中國科技博覽(2016年18期)2016-10-19 08:57:06
科技視界(2016年22期)2016-10-18 15:25:08
科技視界(2016年21期)2016-10-17 17:27:09
科學(xué)與財(cái)富(2016年28期)2016-10-14 19:32:11
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
