光場成像原理及應用技術
2020-03-23 12:22:08張韶輝程雪岷
兵器裝備工程學報 2020年2期
關鍵詞:信息
張韶輝,胡 搖,,曹 睿,程雪岷,郝 群,
(1.北京理工大學 光電學院 精密光電測試儀器及技術北京市重點實驗室, 北京 100081;2.清華大學 深圳研究生院, 廣東 深圳 518055)
光是一種于空間中分布和傳播的電磁場,具有波長、振幅、相位、偏振位置和方向等多種屬性[1]。通過利用物體所發出或反射、散射、衍射的光進行成像來獲取信息,是一種非常重要的傳感方式。
光包含多個維度的信息,傳統成像方式屬于降維采樣,一方面,由場景發射出的光場中包括三維空間位置及兩維空間傳播方向信息,通過積分的方式記錄在二維傳感器,如膠片、CCD或CMOS上,所成像類似于三維空間中一個焦點固定的二維切片圖,焦點部分清晰,離焦部分虛化,方向信息被壓縮。這種成像方式對目標的信息還原度低,場景的三維立體分布信息無法獲取;另一方面,時間、偏振以及波長等信息采用傳統成像方式同樣難以獲取或者在很大程度上被壓縮,傳統成像裝置不具備分辨光場的時間特征參數的能力,無法獲得光從場景中各個區域傳輸到探測器上的時間差別。此外,傳統CCD/CMOS等傳感器無偏振及波長選擇功能,雖然彩色傳感器能夠依靠濾光片獲取RGB三色數據,但無論波長的探測精度還是探測范圍仍然有很大的限制。
傳統成像方式壓縮了諸多光場參數,包括傳輸方向、波長、相位等在內的光場信息,通常攜帶著諸多重要場景目標信息,降維采樣的方式獲取信息的局限性越來越突出,因此無論從基礎理論、描述模型及方法還是光場信息獲取及高效利用等各個角度,對光場進行研究都具有非常重要的意義。
與傳統方式相比,光場成像技術通過同時控制或記錄包含位置和傳播方向在內的多維度光學參量,相較于傳統成像法能夠獲取更完備的信息[2]。光場的基本表述模型以及在此基礎上發展出的各種光場采集以及控制方法,可極大地改變成像、測量以及顯示的方式,在日常生活(光場相機獲取空間位置及傳播方向)、工業測量(結構光投影調制光場位置信息、偏振相機獲取偏振狀態)、自動駕駛(激光雷達獲取光場時間信息)、軍事國防(高光譜成像獲取光場波長信息)、生命科學研究(顯微測量獲取空間位置及傳播方向)、增強現實(Augmented reality利用光場信息進行3D顯示)等方向上都有非常大的發展和應用前景。本文將對包含位置和傳播方向的狹義光場信息表述、獲取及利用進行綜述。
1 光場理論發展歷程
法拉第指出,光場指光在每個方向上通過每個點的通量。針對光的特性,逐漸形成和發展出了幾何光學和物理光學兩種描述光場的理論,幾何光學將光場理解為光線的集合,而每條光線攜帶空間坐標以及傳播方向信息,兩者相互獨立,該模型在描述非相干光時較為方便,但無法描述干涉、衍射等現象;物理光學將光描述為波,能夠描述波長、相位、偏振等特征,其在描述及預測相干光干涉、衍射等行為上更為方便和準確,然而物理光學對于非相干光的描述較為復雜和繁瑣。
將光場看作一系列光線集合的幾何光學表述方法始于1936年,Gershun[3]在其著作《The Light Field》中提出光場的概念,指出光場是針對光通量空間分布的研究,認為光輻射能在時間及空間中是連續的,并且此輻射能的通量在空間不同點之間連續變化,在此基礎上Gershun提出了光矢量的概念以及相應的計算方法,通過向量幾何分析以及積分的方式能夠得到各個位置的光場信息分布,但是由于龐大的計算量限制,該方法及理論未能得到實際的應用。
1991年Adelson,Edward H等[4]提出全光理論,該理論采用七維函數 來表征空間分布的幾何光線,其中表示光線中點的空間坐標,表示光線的傳輸方向,表示光線的波長和傳輸時間,由于光線的波長在傳輸過程中不會改變,因此任意時刻的自由空間光線可由五維函數完整表示。
1996年Marc Levoy等[5]提出采用兩個相互平行的平面上的點坐標來對光場進行參數化特征描述的方法,將五維光場函數降至四維,在此基礎上提出了具體的光場信息傳播、成像等操作的計算公式,此理論以及計算機技術的飛速發展使得計算光場領域飛速發展。
此外,Wigner分布方程也可用來同時描述多維光場信息,其能夠同時體現光場的二維空間位置以及二維的空間頻率,然而光場的空間頻率與傳播方向只有在相干光的前提下才具有對應的關系,因此Wigner分布方程通常只用于相干光場的描述。而基于幾何光學的四維光場函數數學描述方法適用于非相干成像過程中。Marc Levoy等[6]在相干光情況下分析了四維光場描述理論同Wigner分布函數的等效關系。
四維光場理論在計算成像領域取得了很好的成果,基于該理論發展出的一系列光場技術在很大程度上改變了傳統的光學成像和測量的理念和方式。
2 光場的幾何光學表述
根據幾何光學的光線假設,光場即為空間中所有光線輻射函數的集合,每條光線攜帶二維位置信息以及二維傳播方向信息(θ,φ)。Marc Levoy等[5]提出的光場渲染理論指出空間中攜帶位置和方向信息的光線都可以用兩個相互平行的平面來參數化表示。如圖1所示,一條光線穿過兩個平行平面上的兩點,坐標分別為(u,v)和(s,t),兩平行平面之間的間距為F,由兩個點的位置坐標即可獲取光線的二維角度信息,因此可用四維光場函數LF(s,t,u,v)表示。根據四維光場函數,從u,v面射向s,t面上某一點的圖像輻射照度可以由光線輻射度的積分公式表示為:
(1)
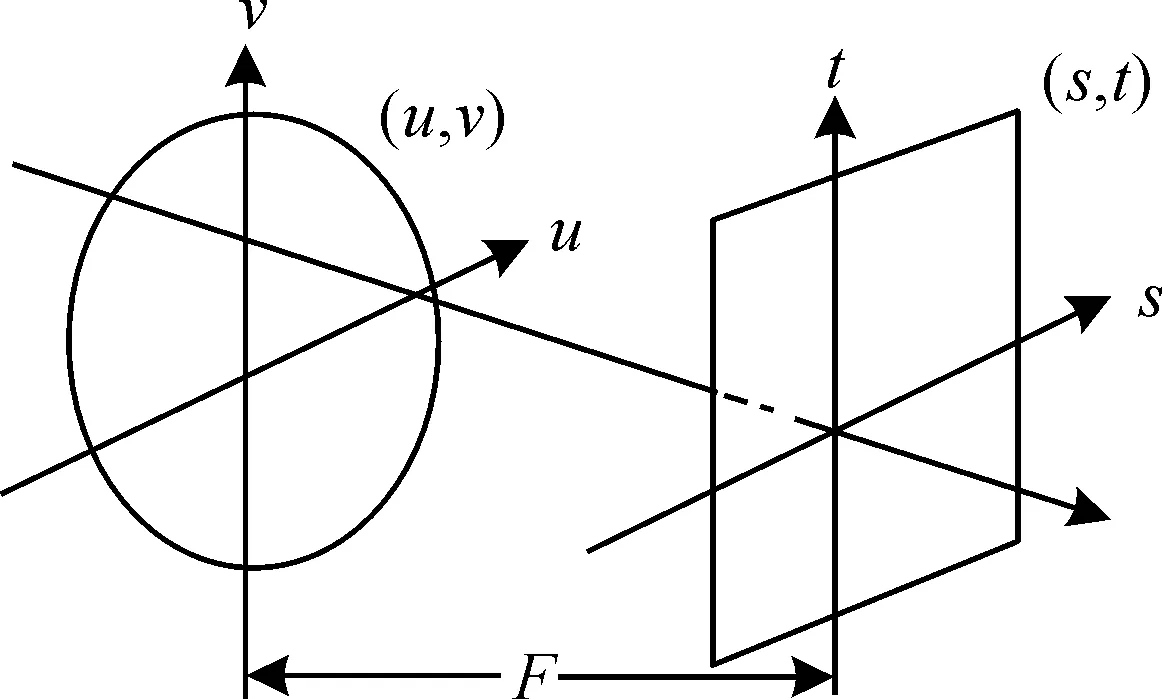
圖1 光場的四維參數化表示
由透鏡面和傳感器面定義的光場函數LF(s,t,u,v)與由透鏡面和重聚焦面定義的光場函數LF′(s,t,u,v)之間的關系可通過幾何變換獲得,如圖2所示,四維光場函數在空間中的傳播相當于一個切變變換[7-8]。
LF′(s,t,u,v)=L(α·F)(s,t,u,v)=
LF(u+(s-u)/α,v+(t-v)/α,u,v)=
LF(u(1-α)+s/α,v(1-α)+t/α,u,v)
(2)
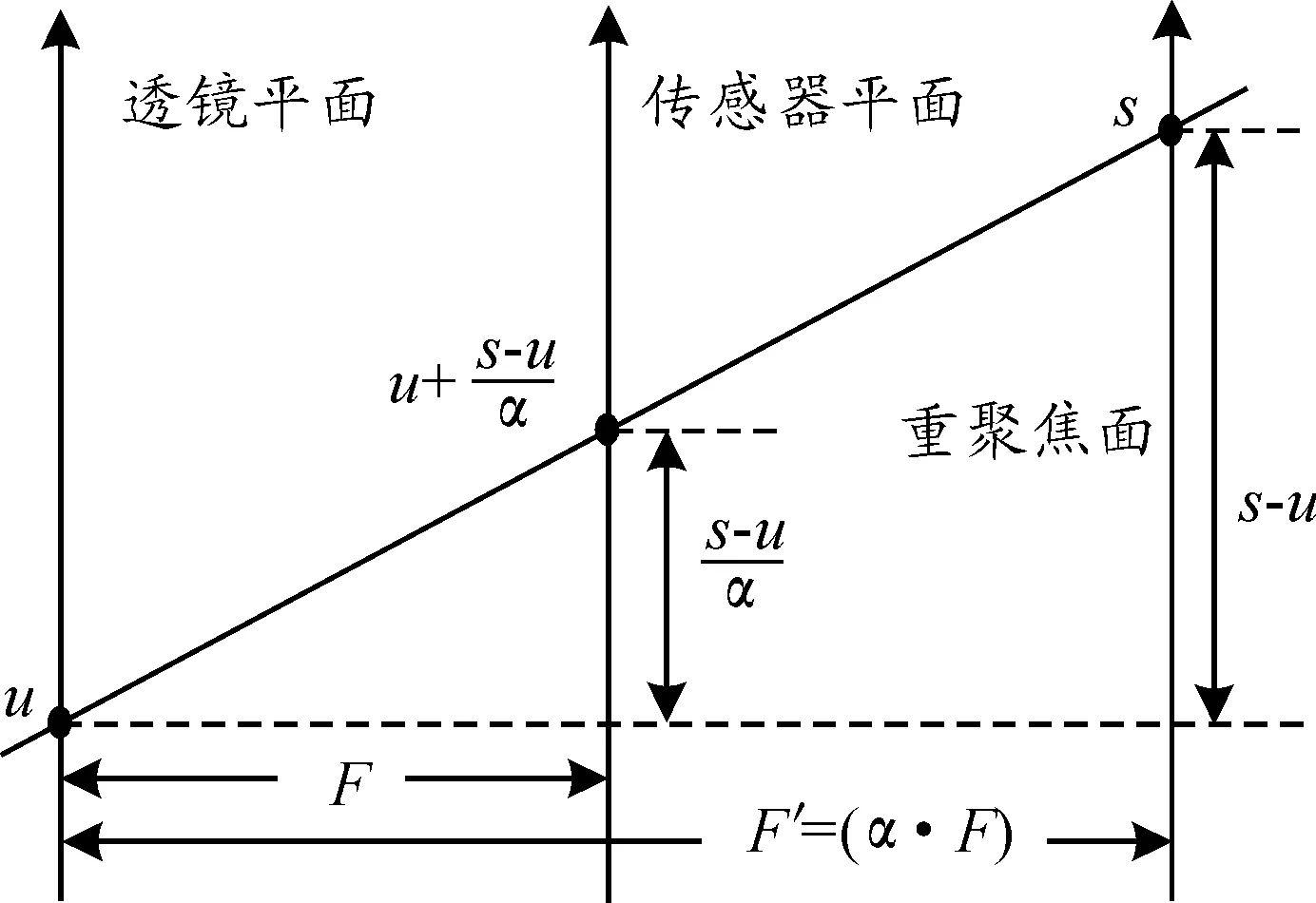
圖2 四維光場函數在空間中的傳播變換示意圖
根據式(1)、式(2),可得到四維光場函數在任何位置的二維切片表述,此方法簡潔高效,可以方便地采用數字化的方式描述和處理光場信息,因此以光線為基本假設的四維光場表達方式在計算成像領域發展迅速、應用廣泛。
3 光場的獲取方式
對光場理解和表述的差異決定了獲取光場函數形式的不同,但無論采用何種方式描述,能夠實現對四個維度的光場參數信息進行區分和測量的技術都屬于光場獲取技術的范疇。應用較為廣泛的技術手段主要包括以下3種。
3.1 相機陣列或相機掃描
相機陣列獲取光場信息是指通過多個相機在空間中的特定分布來獲取不同視角下場景圖像的方式,各相機獲取的是四維光場在該相機相對于場景方向上的二維投影,將相機所得圖像進行融合即可得到完整的四維光場數據。大尺度空間相機陣列主要用于合成孔徑成像實現“透視”監測,或通過拼接實現大視角全景成像,緊密排布相機陣列主要用于獲取高性能動態場景或者場景的三維分布和結構等信息。在相機陣列實現光場測量方向比較成功的有:MIT的8×8相機陣列[9]、卡耐基-梅隆大學的“3D Room”等[10-11],國內清華大學的戴瓊海教授團隊研制的基于相機陣列的光場顯微鏡[12]以及與南京大學的曹汛教授共同提出的3D+光場矩陣拍攝也取得了很好的成果[13-15]。
除多個相機陣列排布外,Marc Levoy[5]、Aaron Isaksen等[16]采用單相機掃描系統,通過相機在固定導軌上的移動分時獲取不同空間視角下的場景圖像,最終進行融合也可以實現同樣的功能,但由于需要掃描,此種方法適合靜態場景的光場測量,并且測量的精度受到相機移動定位精度的影響。圖3和圖4分別為相機陣列及單相機路徑掃描方案實現光場信息獲取的案例。
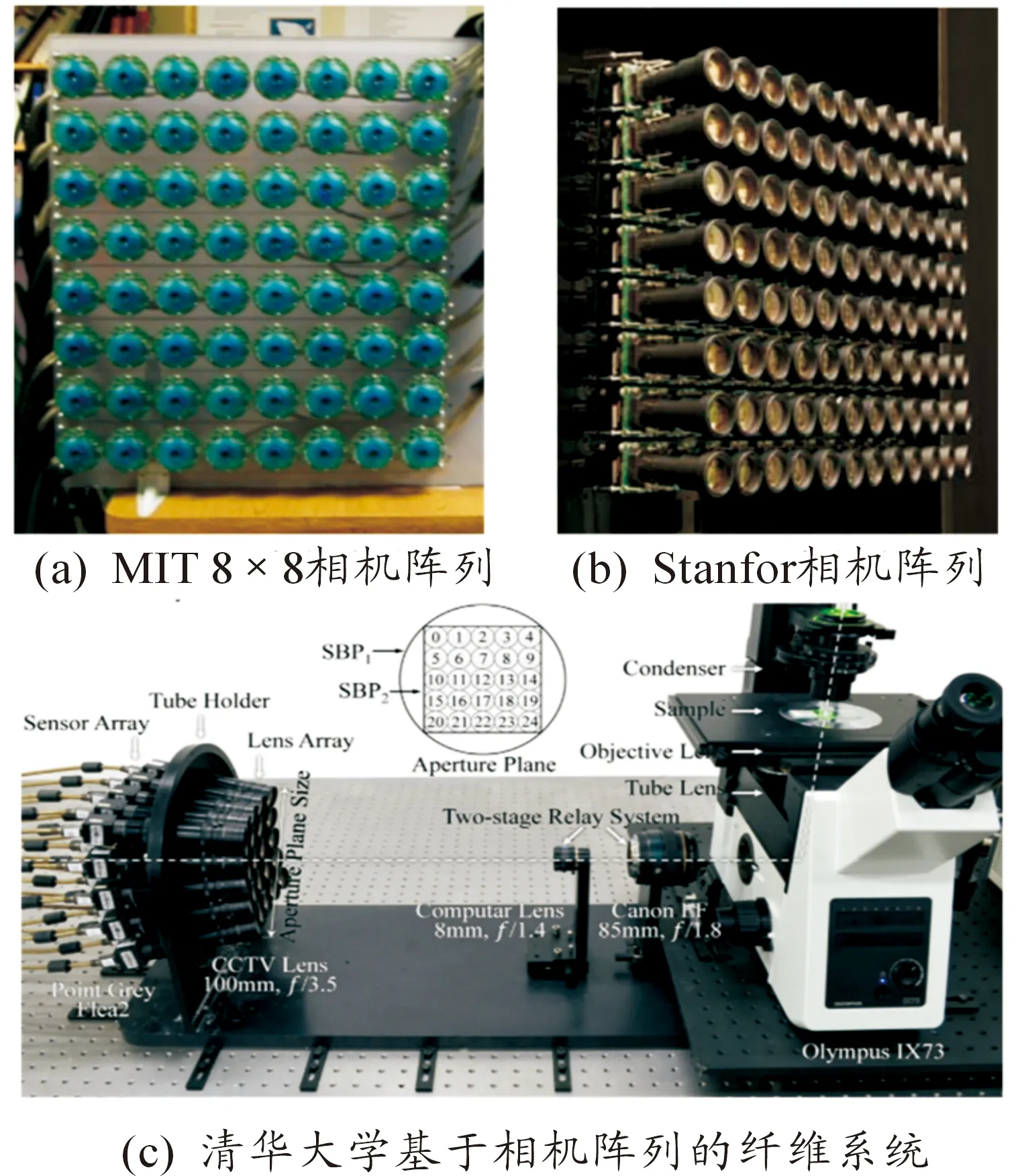
圖3 相機陣列光場信息獲取案例

圖4 單相機掃描光場信息獲取案例
3.2 微透鏡陣列
相機陣列體積巨大,使得其應用場合受到很大限制,將相機陣列中各個成像單元之間的基線縮小,可實現在單個相機框架下通過微透鏡陣列來實現光場信息的采集。圖5為基于微透鏡陣列獲取光場信息的原理示意圖,在普通成像系統主透鏡的一次像面處插入微透鏡陣列,每個微透鏡單元及其后對應的傳感器區域記錄的光線對應場景中相同部分在不同視角(對應光線不同傳播方向)下所成像的集合,因此采用二維透鏡陣列能夠得到同時包含位置和傳播方向在內的四維光場數據。
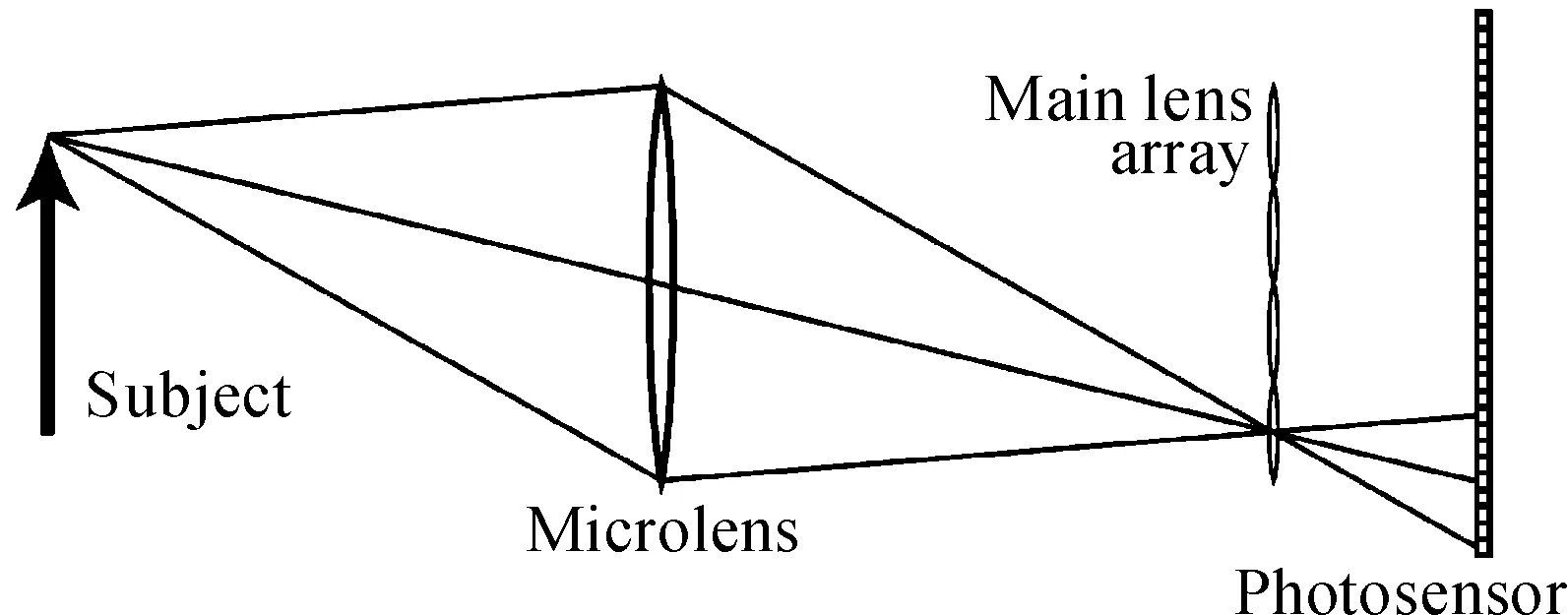
圖5 微透鏡陣列成像原理示意圖
1992年,Adelson等[17]首次提出基于微透鏡陣列的光場相機模型;Ren Ng等[8]優化了該模型,通過優化光路縮小體積實現了手持式光場相機產品,于2010年成立Lytro公司[18],現已推出圖6(a)和圖6(b)所示的Lytro(Plenoptic1.0)與LytroIllum兩款消費級相機,可實現“先拍照,后聚焦”的功能,在低光及影像高速移動的情況下,仍能準確對焦拍出清晰照片。
同Lytro所生產的消費級產品相比,德國Raytrix公司自2008年創立起即從事工業級光場相機研究和推廣[19]。圖6(c)與圖6(d)所示為其推出的Raytrix R5、Raytrix R11系列光場相機,可用于立體顯微、自動光學檢測以及三維形貌檢測等科研及工業領域,在人臉識別、交通監控以及瞳孔掃描等公共安全領域以及太空、軍事等國防領域也都有相關的解決方案以及應用案例。
基于微透鏡陣列的光場相機技術方案發展迅速,除Lytro及Raytrix外,諸多科技公司也陸續推出了光場相機或光場成像模塊[20-25],圖7(a)為Adobe magic lens光場相機[20],圖7(b)為Cafadis基于微透鏡陣列的鏡頭及相機[21],圖7(c)、圖7(d)分別為Toshiba[22]與Pelican[23]公司推出的光場成像模塊。

圖6 光場相機
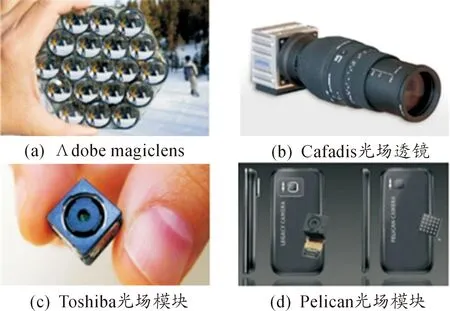
圖7 光場相機及模塊原型樣機
基于微透鏡陣列的光場相機獲取光場信息的方案,其優點是各成像單元間相對位置及角度關系穩定、系統體積小、可移植性強、相應的數據處理方法及軟件成熟,缺點是通過犧牲空間分辨率來獲得角度分辨率,在要求高空間分辨率的場合無法滿足要求,為解決空間與角度分辨率不可兼備的問題,基于光場相機的超分辨理論研究也逐漸獲得關注。
3.3 掩膜及其他
微透鏡陣列獲取光場方案通過犧牲空間分辨率來換取角度分辨率。與之相比,掩膜法通過在相機主鏡頭與傳感器之間插入的光學掩膜來實現對進入相機系統中的光進行調制,并在感光元件記錄之后通過算法進行四維光場信息的恢復。典型方案為VeeraraghavanAshok通過在普通相機光路中插入掩膜實現的光場相機[26]。如圖8所示,基于掩膜的光場采集系統獲取的圖像看似與普通相機類似,但其頻域呈規律性分布,與光場數據的頻域特性類似,能夠通過相關處理得到四維光場信息。此類方法的優點在于掩膜是非折射元件,硬件系統更加簡單,初級數據處理更加容易,比微透鏡陣列結構更容易實現。此外,Antony orth等[27-29]提出Light field moment imaging(LMI)采用在不同離焦位置采集二維圖像的方式同樣可得到四維光場數據,加州理工學院的Guoan Zheng等[30-32]提出傅里葉疊層成像技術(Fourier Ptychography imaging),通過采用不同傳播方向的相干光照明樣本或者掃描孔徑的方式,得到了四維光場數據并實現了數字重聚焦。
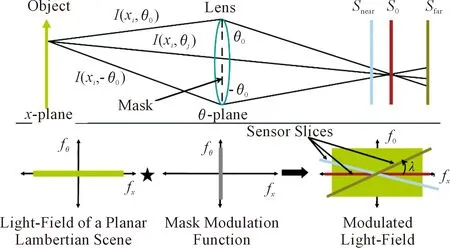
圖8 掩膜光場采集系統原理示意圖
4 光場數據處理技術及應用方向
光場數據處理的主流方式都是基于光線假設的四維光場理論模型,依據用途區分,主要的處理方法大致包括數字重聚焦、3D成像、合成孔徑、光場渲染、立體顯示等五種。
4.1 數字重聚焦
根據測量得到的四維光場數據,進行數字重聚焦可以在不受主透鏡景深的限制下獲得各個平面的清晰圖像,因此在測量時無需對特定平面進行對焦,擺脫了傳統成像中景深的限制,并提供了三維成像的新思路[7,33,34]。數字重聚焦處理方式主要有兩種:空域積分投影和頻域切片變換。
空域積分投影在獲取四維光場函數LF(s,t,u,v)之后,可根據式(2)進行變換進而得到各個重聚焦面上的光場函數LF′(s,t,u,v),在每個重聚焦面上根據式(1)積分,從而得到該特定面上的像。因此,此方案能夠獲得各個重聚焦面上的清晰圖像。
然而空域積分投影所實現的光場數字重聚焦,計算量指數上升,計算速度慢。斯坦佛大學的Ren Ng將醫學以及天文學中常用的傅里葉切片法引入到光場信息處理中,實現了在頻域中的數字重聚焦,減小了計算量,可以快速獲得各個面處的清晰像[7-8,18]。由于頻域傅里葉切片成像法實現數字重聚焦的計算量要遠小于空域積分投影法,因此,此方法目前已經成為光場函數數字重聚焦的主流。圖9為單次獲取四維光場數據后進行數字重聚焦所得到的各個深度的清晰成像結果。
4.2 3D成像
基于四維光場數據的3D成像核心為場景的深度信息提取,相關主流算法大致可分為3個方向:1)基于極平面圖像的深度估計;2)基于多視圖立體幾何約束的深度估計以及3)光場數字重聚焦深度估計。
極平面圖像(Epipolar Plane Image,EPI)為四維光場信息的二維切片,包括一個空間尺寸維度與一個角度維度,場景中一個物點在EPI中顯示為一條傾斜的直線,該直線的傾斜度與該物點到相機的距離成比例[43],如圖10所示。因此,從光場相機或者相機陣列所獲取的四維光場數據中選取二維EPI切片,通過對應物點的斜率來獲取其深度信息。此方法源自多視圖幾何理論框架,Sven Wanner[35],Michael W.Tao[33]等提出系列改進和優化算法,實現了較為清晰的深度圖的獲取,細節比較平滑,同時節約了深度信息提取的時間。

圖9 各個重聚焦面的聚焦結果(A1~A5)和多個重聚焦面合成圖像(B)
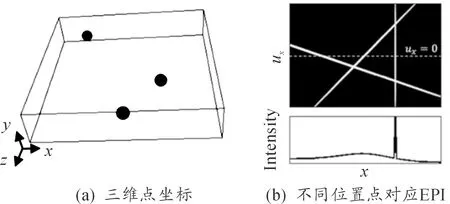
圖10 EPI斜率與點三維坐標對應原理示意圖
在相機陣列與單相機集成微透鏡陣列方案中,光場獲取裝置可等效為多視圖幾何模型,其最簡化版為雙目視覺系統。雙目視覺系統通過模擬生物眼睛產生立體視覺的效果,圖11 為雙目系統深度測量原理[36],目標物點在兩個像面上成像位置不同,產生視差,通過視差數據以及各相機外參關系即可獲取目標物點的深度數據。在立體匹配誤差相同的情況下,由視差數據獲取深度信息方法中,深度信息的精度與基線長度直接相關,基于微透鏡陣列的光場相機中各等效子孔徑間基線很短,采用傳統匹配方案難以獲取高精度的深度數據信息。因此,在此方向的研究主要集中于增加約束信息以獲取更精確地視差圖算法上,Adam Bowen,Tom E.Bishop 等人以顏色信息增加約束提取了全分辨率的深度圖像[37-38];Francisco C.Calderon,Tom E.Bishop,NeusSabater等人充分利用光場相機的多個視角信息,對匹配點進行多重約束,提高了特征匹配的精度[39-41]。
根據光場相機得到的四維光場數據,以及傅里葉切片法可進行數字重聚焦,獲取焦點堆棧圖像,通過清晰度評價等像質評價方法以及成像系統物像關系特征,可計算重構出目標場景的深度圖。在此框架下,Michael W.Tao采用梯度檢測和圖割的方式獲取了全聚焦圖像,并利用朗伯反射體表面特性以及光照和陰影信息分析數字重聚焦的角度關聯性,將離焦與特征匹配相結合,得到了更為清晰和可靠的深度數據[33],如圖12所示。
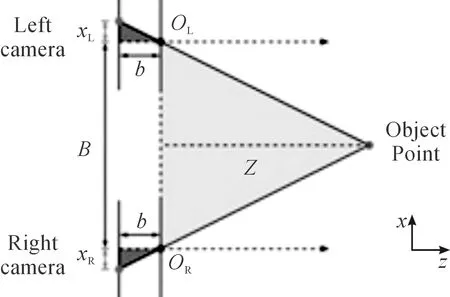
圖11 雙目系統深度測量原理示意圖
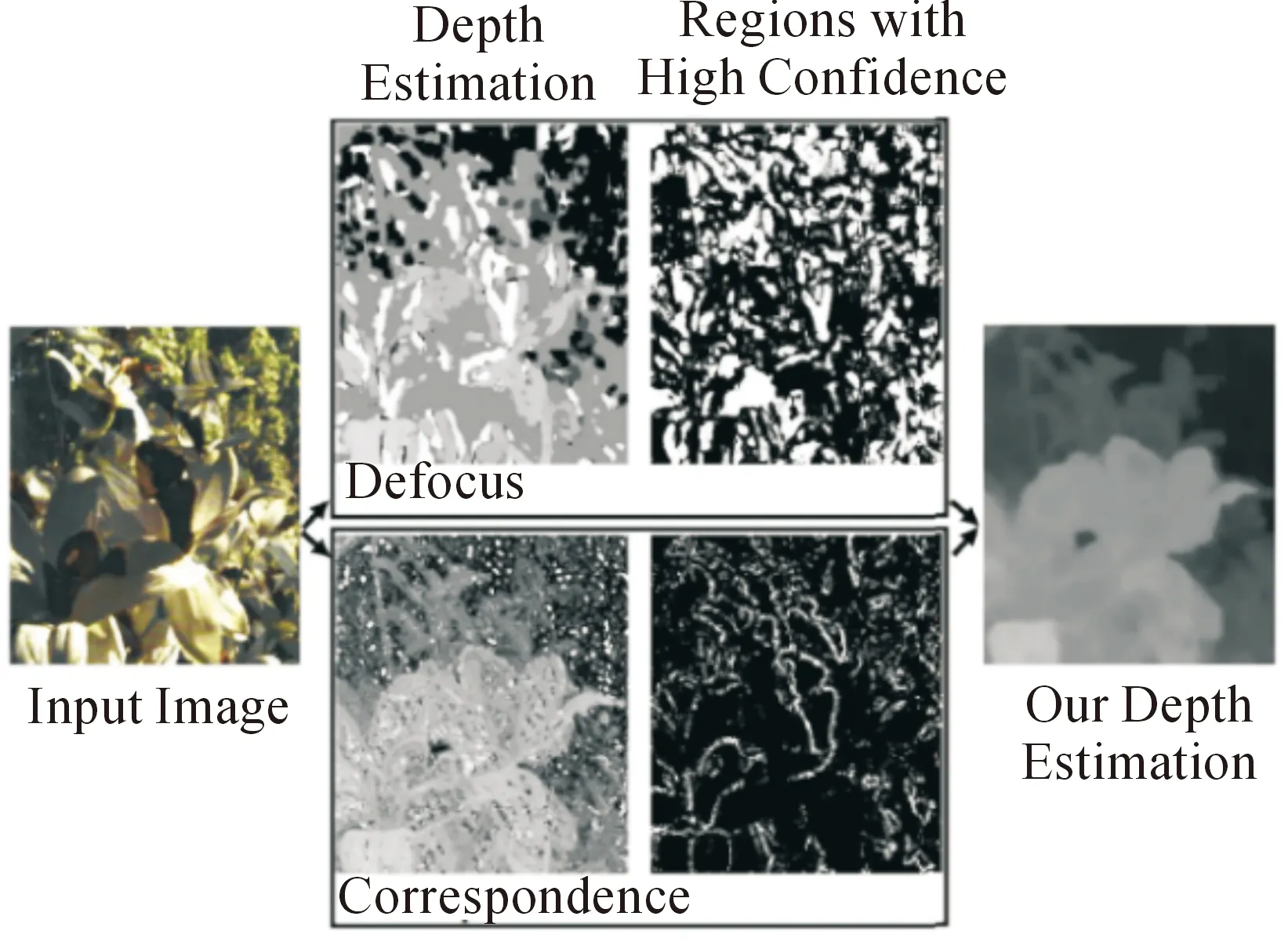
圖12 離焦與特征點匹配結合的深度效果圖
4.3 合成孔徑成像
圖13(a)展示了針孔成像的原理,光線通過一個針孔成像,形成一個彌散光斑,針孔半徑越大,參與成像的光通量就越大,但是彌散斑的尺寸也就越大。圖13(b)將小孔由透鏡替換,理想的透鏡能夠實現“點物成點像”,物面上的點理想情況下在像面成完美的點像,如果有一點障礙物在景深范圍之外的空間平面上,則其在像面上會形成彌散圓,從而失去遮擋的效果[2]。圖13(c)中透鏡孔徑擴大至與物距可比擬,此時成像系統的景深很小,只有聚焦面及其附近的點能夠清晰成像,其它偏離聚焦面的點則會形成彌散斑,圖13中障礙物只能部分得遮擋由點物發射并進入到探測器的光。由于孔徑很大景深很小,障礙物將在像面上形成一系列直徑很大的彌散圓而不足以遮擋目標物,目標依然能夠在像面上清晰成像。因此,原則上講只要成像系統的孔徑足夠大,就能起到一定程度的跨越障礙物成像的目的。但增大單一成像系統的尺寸代價大且會附帶明顯的邊緣相差等問題,圖13(d)為采用合成孔徑的方式擴大相機的“孔徑”尺寸,將處于各個位置的子相機認為是一個超大孔徑相機的一部分,將其各自所獲取的圖像進行合成,從而實現穿越障礙物對目標物體清晰成像甚至三維成像及定位。此外,相機陣列合成孔徑還可以實現在保證分辨率的前提下擴展視場范圍等功能。

圖13 基于光場的合成孔徑成像原理圖
經典的光場相機陣列合成孔徑成像系統根據設定的聚焦平面將從不同角度獲取的場景圖像投影到同一個圖像平面上[2,42],使得觀察者能夠透過場景中的遮擋物看到被遮擋的物體。
圖14為采用相機陣列實現的穿越障礙物對感興趣區域進行成像的示例,依靠相機組成陣列的方式合成較大孔徑進而實現穿過障礙物成像在軍事、民用等多個領域都有應用,例如加州大學伯克利分校的Laura Waller等人開展了基于光場技術的穿過強散射介質進行成像的研究[43],這對于強霧霾天氣以及多云天氣機載光學雷達以及星載光學成像系統進行清晰成像和探測具有很大的幫助。
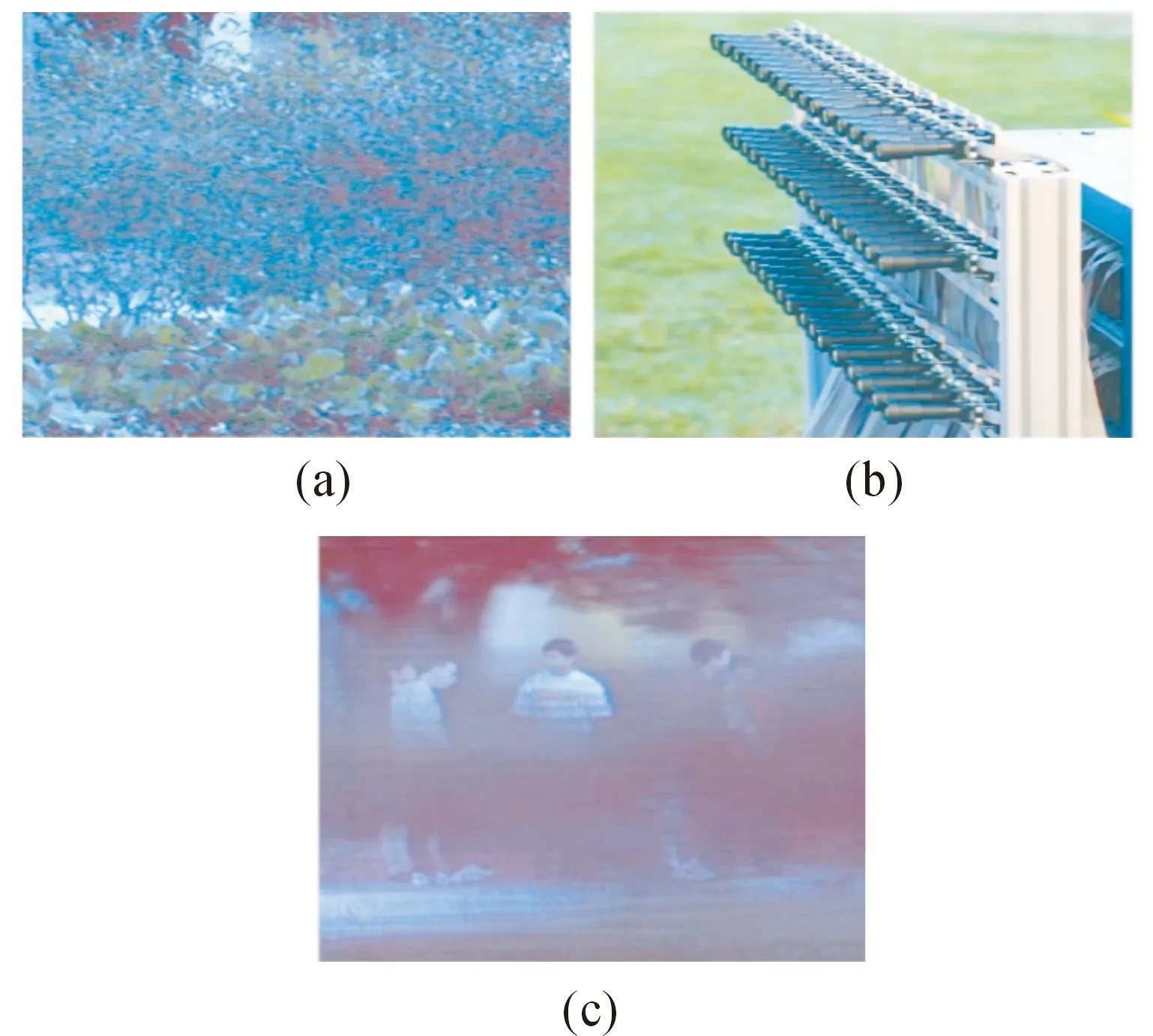
圖14 相機陣列合成孔徑穿越障礙物成像示例
4.4 光場渲染
圖像渲染技術是指在不對目標進行建模的情況下,根據輸入的原始圖像數據集進行處理并得到輸出目標圖像。傳統的圖像渲染方法依據各次圖像采集時相機之間的幾何參數轉換或者圖像之間的匹配關系,如圖15所示。Marc Levoy等人提出光場渲染的方法[5],在不需要圖像的深度信息或精確匹配的情況下,通過構建多相機系統或者單相機位置掃描獲取目標場景的原始光場信息,各原始圖像構成四維光場數據,針對目標位置及角度的場景信息,從此四維數據中進行簡單重采樣即可獲得從任意角度及位置觀察目標場景的二維光場切片,此方法較為簡單且魯棒性強,渲染速度快,精度高。

圖15 光場渲染原理示意圖
4.5 立體顯示
將相機陣列或微透鏡陣列采集光場信息的過程反轉可實現三維顯示,采用陣列分布的投影裝置同時進行二維投影,最終在特定的區域內能夠實現三維真實場景的再現,利用這種增強現實的方法實現裸眼3D[44-46],可為軍事對抗及模擬,單兵及機械實時地形現實等提供技術支持。圖16為NVIDIA頭戴式近眼光場顯示原型及效果圖[47];圖17為南加州大學采用多視投影原理實現的真人1∶1光場顯示系統[48]。
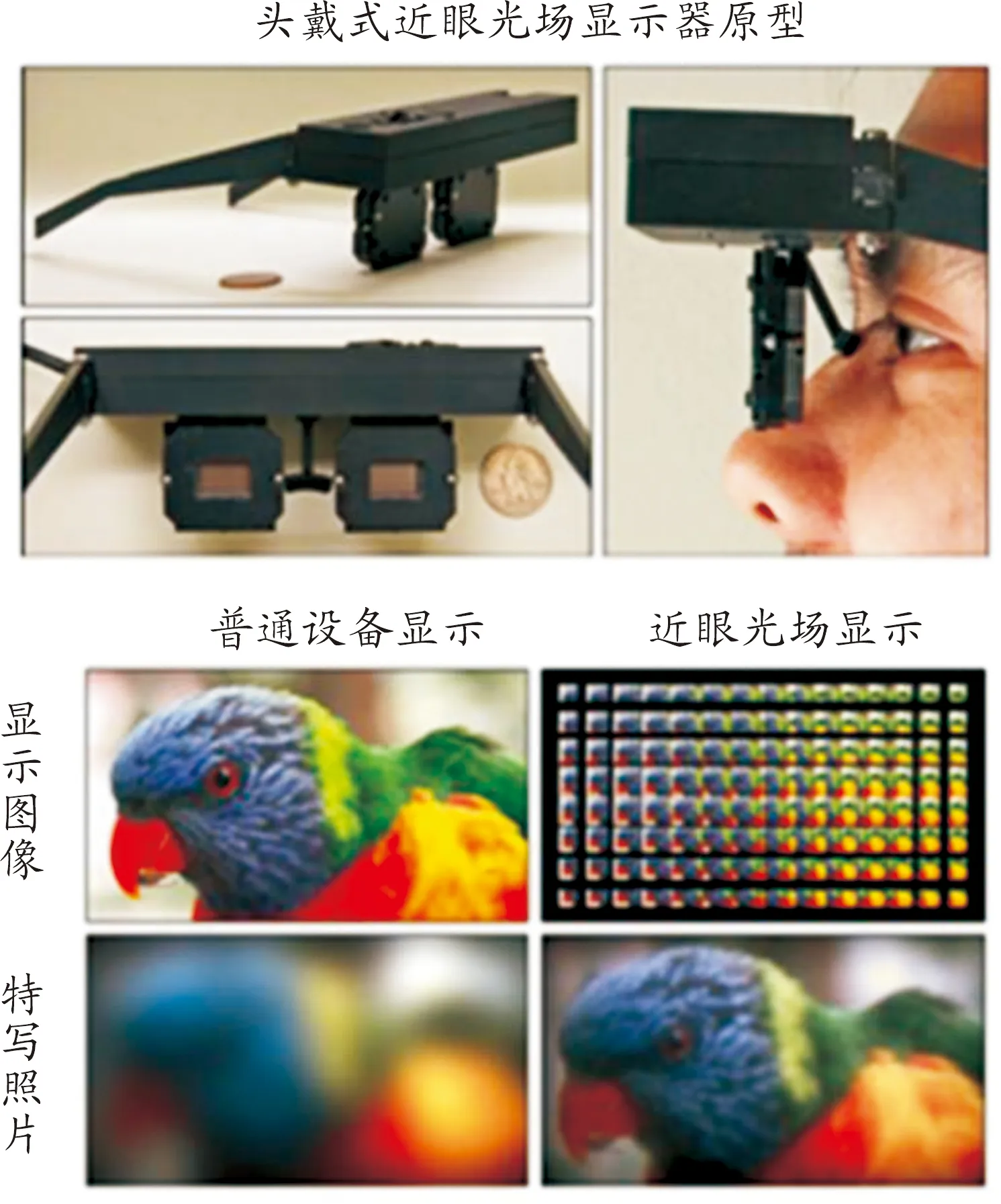
圖16 NVIDIA 頭戴式近眼光場顯示原型
5 總結和展望
光場包含多個自由度的信息,而傳統成像方式將光場進行降維積分采集到二維的膠片或電子傳感器上,丟失了很多原始數據,這種認識客觀世界的方式信息獲取不夠完善。光場成像理論的出現使得人類開始關注更加完備的光場信息獲取及利用,通過采用一系列手段控制或者測量四維光場參量,能夠獲取更為豐富和全面的被測場景信息,這是一場關于光場原始信息采集的重大變革,改變了成像的思維方式,打開了新的認識世界的窗口。
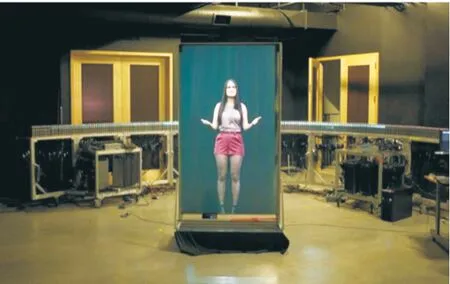
圖17 南加州大學真人1∶1多視投影光場顯示系統
隨著光場成像描述理論的完善以及光場控制和獲取技術的發展,光場成像技術已經并正在逐步改變人類認識世界的方式。包括手持式光場相機、光場顯微鏡、結構光投影測量、相機陣列、合成孔徑、AR3D顯示等一系列技術及產品,在人們日常生活、科學研究、生產實踐、軍事國防等多個領域發揮了重大作用。
相對于傳統的測量、成像及顯示方式,光場技術優勢明顯,但并非成熟,無論從描述理論還是實現手段都仍存在很大優化空間。用于描述光場函數的兩種方式各有利弊,基于光線假設的四維光場函數物理形象清晰,所得數據容易與計算模型相結合,但是無法完整地反應干涉衍射等現象,而基于Wigner分布函數的光場描述方式能夠較為完備地涵蓋光場的多維度信息,但是難以用于描述非相干光場,且與計算成像體系融合難度較大,雖然一些科學家將這兩種理論進行了一定程度的互通和聯系,但是依然存在著較大壁壘。在獲取光場信息方面,獲取及操縱四維光場信息以犧牲其它參數指標作為代價,例如采用微透鏡陣列的手持式光場相機以及光場顯微鏡犧牲了空間分辨率來換取多視角視圖,相機陣列在大程度上增加了系統的體積,Ptychography以及Fourier Ptychograph等方法則是通過延長測量時間來獲得四維光場數據。如何權衡及兼顧犧牲與增強的參數類型是目前光場成像技術的研究熱點,此外光場成像技術與計算成像相結合,具有非常大的計算量,這也使得數字存儲以及處理器的速度在一定程度上成為光場成像技術發展的限制。
綜上所述,光場成像是一個較新的理論及技術發展方向,目前已經在科學研究、生產生活、國防軍事等方面發揮出了顯著的作用,但在理論描述、技術實現、軟硬件處理能力、商業化成本以及使用便捷性等方面仍然存在著諸多亟待解決的問題。光場理論及成像技術仍然處于飛速的發展階段,隨著時間的推移,光場技術將會更大程度地改變人們認知及改造世界的方式。
6 結論
整體而言,從原創性角度,在光場信息的獲取、處理及應用等各個方面,國內相關研究都處于跟隨者位置,從研究水平的角度看,也基本與國際前沿維持在同一個水平線上。
當前主流的光場信息獲取手段為基于微透鏡陣列的光場相機,然而國外企業已構建相對成熟和封閉的專利體系,并以德國的Raytrix和美國的Lytro公司生產的科研和消費級的系列產品為代表,壟斷了絕大部分市場。光場信息的獲取是處理和應用的前提,因此,國內光場領域的長期穩定發展需要在光場方法及裝置方面進行更加深入的研究,如何在國外現有方法和專利體系保護的環境下,研制及構建出自主知識產權且具有一定市場競爭力的光場信息獲取設備,是國內光場技術長期穩定發展的必要條件。在幾何光場獲取方式研究相對完善和飽和的情況下,通過將物理光學中相關光學傳播規律及技術(利于光強傳輸方程)應用于光場信息的獲取,或許為實現新型光場獲取手段的可行方向及突破點。
目前而言,光場信息(僅考慮四維光場)獲取的手段發展已比較完善,但其應用方向還有待進一步開發和拓展。數字重聚焦及三維重構為當前最主要的兩個光場應用方向,數字重聚焦概念自Ng Ren提出以來發展較為成熟,已在Lytro產品中得以應用。三維重構則大多數以傳統的多目立體視覺為理論基礎開展,由于光場相機尺寸較小,各子視場間基線較短,限制了高精度視差圖的獲取,因此,目前此方面研究相對比較緩慢。針對這一現狀,一方面,國內可在利用光場信息進行三維重構這一具體應用上開展更多的工作,例如,采用深度學習方法,充分利用光場信息進行多目立體視覺系統視差圖的獲取或許為可進行進一步嘗試的方向。此外,將光場信息的應用領域進行拓展具有更大的意義,除數字重聚焦及三維重構外,由于其信息的豐富性,光場技術還有用于去霧成像、水下成像、三維物體識別、超分辨成像等諸多領域的潛力,拓展光場信息的應用范圍,開展基于光場信息的新的研究方向亦為國內進行光場相關研究的方向之一。
此外,本文主要以四維光場信息為對象,相關的成像理論及光場信息利用方式都僅考慮光線的二維空間位置和二維傳播方向。然而真實的光場包含更多維度的信息,從幾何光學角度的四維光場信息到包含相位、偏振、波長等在內的物理光學角度的光場信息,其獲取及應用具有非常重要的研究意義和應用前景。建立更為完善的光場理論模型,并充分研究更多維度光場信息的獲取方式、處理手段以及應用方法是國內在光場領域進行嘗試和探索的可行方向。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32