一種電壓編程型AMOLED像素電路設計
2020-03-18 09:42:42張立文曾涌韜關肖飛李月華王新林何紅宇
智能計算機與應用 2020年10期
張立文, 曾涌韜, 關肖飛, 李月華, 王新林, 何紅宇
(超快微納技術與激光先進制造湖南省重點實驗室(南華大學), 湖南 衡陽 421001)
0 引 言
有源矩陣有機發光二極管(AMOLED)已逐步取代傳統的液晶顯示(LCD),成為下一代顯示的主流技術[1]。目前,AMOLED像素電路所使用的晶體管主要分為3種類型:非晶硅薄膜晶體管、低溫多晶硅薄膜晶體管和銦鎵鋅金屬氧化物晶體管。與其它兩種晶體管相比,低溫多晶硅薄膜晶體管具備高遷移率和穩定性的特點,因此在像素電路中得到了廣泛的應用[2-3]。但是,工藝局限性導致的不均勻性,長時間工作下電應力的影響,都會導致驅動晶體管(驅動管)閾值電壓(VTH_TD)和遷移率(μ)漂移,引起OLED的驅動電流變化。因此,有必要設計像素驅動電路來補償上述因素的影響,穩定OLED的驅動電流。
現已報導的像素驅動電路主要分為兩種:電壓編程型和電流編程型[6-7]。與電流編程型相比,電壓編程型具有對比度高、充電時間快、更適用于高分辨率顯示等優點。因此,電壓編程型像素驅動電路已成為像素電路設計的主流[8-13]。
早期的電壓編程型像素驅動電路僅能補償驅動管閾值電壓的漂移。后來的電路既能補償驅動管閾值電壓漂移,又能補償驅動管遷移率的漂移。為此許多研究者提出了自己的思路:文獻[14-16]利用在數據輸入階段引入電位變化量,提高驅動管柵極電位或降低源極電位,以實現對驅動管遷移率漂移的補償;文獻[17]推導出了上述電位變化量的具體表達式;文獻[18-19]在電路中引入鏡像結構;文獻[20]對數據輸入階段的時序進行調整,使驅動管提前開啟或關閉,以引入電位變化量。文獻[21]中提出的5T2C電路,雖然能有效補償驅動管閾值電壓的漂移,但不能補償驅動管遷移率的漂移。因此,本文在文獻[21]的基礎上,通過優化電容的布局,調整數據輸入階段的時序,實現了驅動管遷移率漂移的補償。
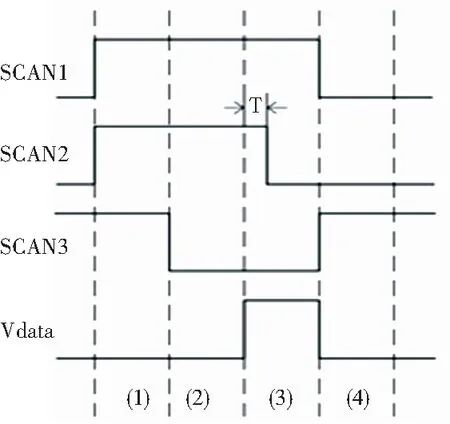
圖1 電路工作時序
1 像素電路結構與原理
像素電路的結構如圖2所示。
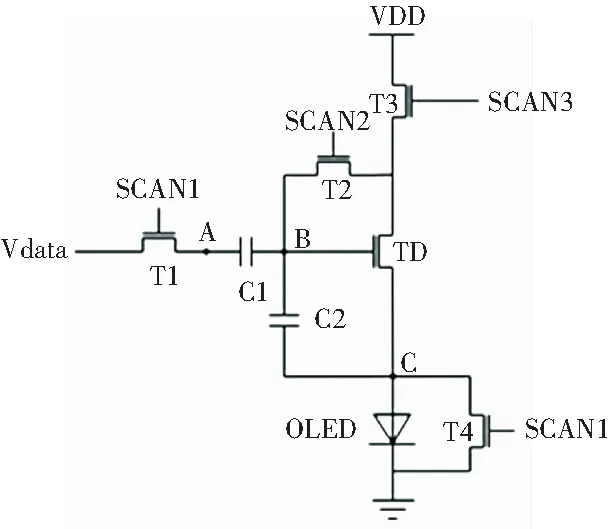
圖2 像素電路結構
電路由5個N型低溫多晶硅薄膜晶體管和二個電容C1、C2構成。T1~T4為開關管,TD為驅動管。SCAN1~SCAN3為掃描信號線,Vdata為數據輸入線。電路的工作時序如圖2所示,共分為4個階段:重置階段、補償階段、數據輸入階段、發射階段。對各階段電路的工作原理分析如下:
(1)重置階段。SCAN1~SCAN3均為高電平時,T1~T4處于導通狀態。數據電位Vdata為低電平,其值為Vdata_L。由于T1管導通,因此A點電位和數據電位Vdata相同,即Vdata_L。T4管處于導通狀態時,C點與接地端相連,C點為零電位。電源電位VDD通過T2、T3管給B點充電至VDD。
驅動管TD產生的驅動電流IOLED通過T4流向接地端,不會流經OLED,因此OLED不會發光。
(2)補償階段。SCAN1、SCAN2保持高電平,T1、T2、T4保持導通狀態。SCAN3變為低電平,T3管截止。Vdata保持低電平Vdata_L,C點保持零電位。本階段,驅動管TD初始時導通且處于二極管連接狀態,B點逐漸放電,電位下降至VTH_TD,此后TD截止。
由于T4管導通,本階段OLED不會發光。
(3)數據輸入階段。SCAN1保持高電平,T1、T4保持導通狀態。SCAN3保持低電平,T3保持截止狀態。
在進入數據輸入階段的瞬間(t=0時刻),Vdata變為高電平Vdata_H。該變化量經T1傳遞至A點后,再經C1和C2耦合,使B點電位瞬間升高,此時B點電位為:
(1)
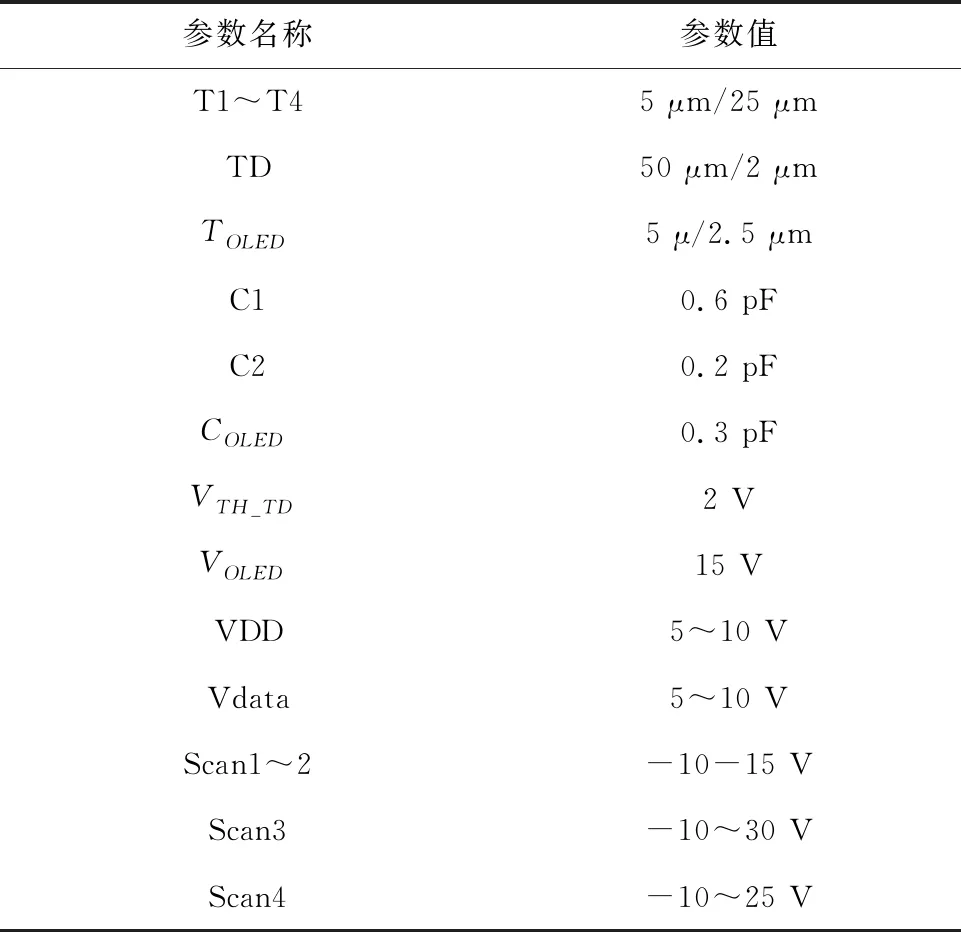
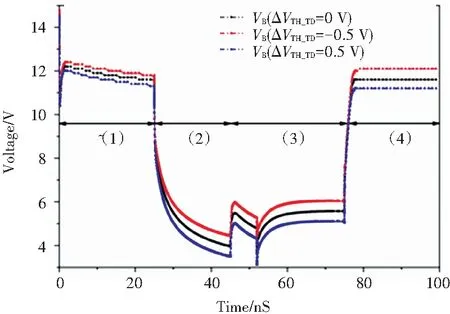
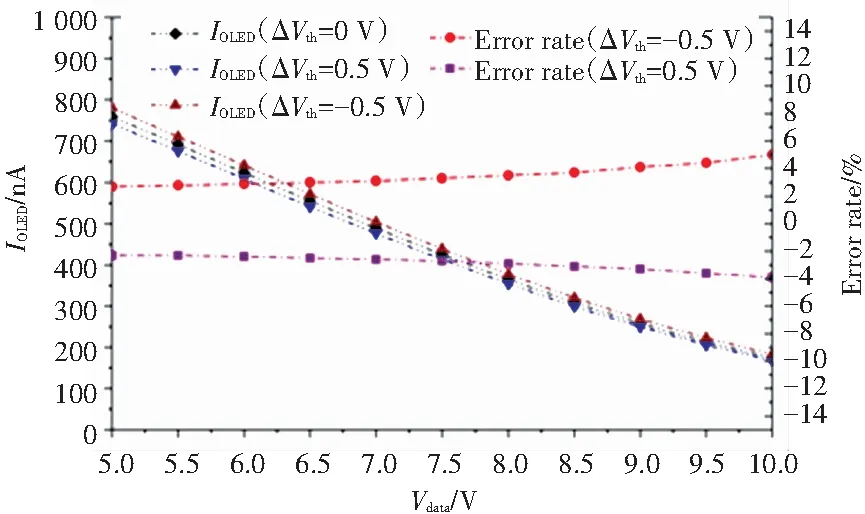
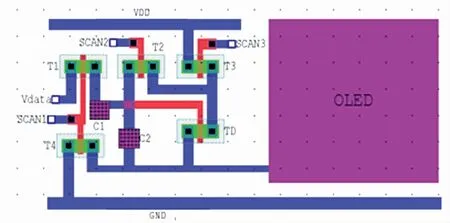
當0 在t≥T時, SCAN2變為低電平,T2截止,驅動管TD電流為零,B點電位不再降低。此時B點電位為: (2) 在本階段,由于T4保持導通狀態,C點保持零電位。 C2兩端的電壓為: (3) 由于T4管導通,本階段OLED不會發光。 (4)發射階段。SCAN3變為高電平,T3導通。SCAN1變為低電平,T1和T4截止。SCAN2保持低電平,T2保持截止狀態。T4截止,C點電位由零電位瞬間升高VTH_OLED。由于C2兩端的電壓值不能突變,保持VC2,B點電位也瞬間升高VTH_OLED。驅動管TD導通,其柵源電壓VGS等于VC2,TD驅動OLED發光。OLED的驅動電流公式為: (4) VGS=VC2. (5) 將式(3)代入式(5),再將式(5)代入式(4),得到OLED的驅動電流為: (6) 其中,k=μCOXW/L。COX為柵氧層的電容,W/L為驅動管TD溝道的寬長比,k與驅動管TD的遷移率μ成正相關。 由式(6)可以看出,IOLED與驅動管TD的閾值電壓VTH_TD無關,說明該電路能補償閾值電壓VTH_TD漂移。k和ΔVμ均與驅動管TD的遷移率μ成正相關,說明該電路能補償遷移率μ的漂移。 本節將對本文所提出的電路進行SPICE仿真。仿真電路中,OLED的模型由一個N型薄膜晶體管TOLED和一個電容COLED并聯代替。仿真時,用到的器件參數與施加的電壓見表1。 表1 器件參數與施加的電壓 在不同VTH_TD時,B點的電位VB隨時間的變化情況如圖3所示。在第3)、4)階段,當VTH_TD增大或減小0.5V時,VB大約增大或減小0.5 V,驗證了式(2)的正確性。 在不同VTH_TD時,OLED的驅動電流IOLED及其誤差隨Vdata_L的變化情況如圖4所示。IOLED隨著Vdata_L的增大而減小,驗證了式(6)的正確性。當VTH_TD增大或減小0.5 V時,IOLED的誤差率約為4%,表明電路能有效補償VTH_TD的漂移對IOLED的影響。 在不同μ時,OLED的驅動電流IOLED及其誤差隨Vdata_L的變化情況如圖5所示。IOLED隨著Vdata_L的增大而減小,驗證了式(6)的正確性。當μ增大或減小30%時,IOLED的誤差率范圍約為3%~9%,表明電路能有效補償μ的漂移對IOLED的影響。本電路與文獻[24]中的電路相比,優化了電容布局。使得在數據輸入階段,電容C1與驅動管TD的柵極隔開,數據電平Vdata的細微波動就不會影響到ΔVμ,因而實現了對遷移率漂移的補償。 圖3 不同VTH_TD時,VB隨時間的變化 圖4 不同VTH_TD時,IOLED及其誤差隨Vdata_L的變化 圖5 不同μ時,IOLED及其誤差隨Vdata_L的變化 本電路的版圖結構如圖6所示。左邊為5個N型晶體管及二個電容,右邊為OLED。 圖6 電路的版圖 本文改進了一種電壓編程型像素補償電路,相比于未經改進的電路結構,增加了新的補償功能,即對驅動晶體管的遷移率漂移問題進行補償。本文所提電路通過對電容布局和數據輸入階段時序進行優化,產生一個與驅動晶體管遷移率成正相關的電位變化量,用來補償遷移率的漂移。SPICE仿真結果表明,驅動管的閾值電壓改變±0.5 V時,驅動電流變化的誤差率約為4%;驅動管的遷移率改變±30%時,驅動電流的誤差率范圍為3%-9%,補償效果較好,驗證了電路設計的正確性和可行性。在此基礎上繪制了電路的版圖,為后續電路的實物化做好了鋪墊。
2 仿真結果分析

3 結束語