軌道靜檢相對測量中長波計算方法的修正
2020-03-16 12:46:52熊麗娟朱洪濤吳維軍魏暉曹娟華
鐵道科學與工程學報 2020年2期
關鍵詞:測量
熊麗娟,朱洪濤,吳維軍,魏暉,曹娟華
軌道靜檢相對測量中長波計算方法的修正
熊麗娟1, 2,朱洪濤1,吳維軍1,魏暉3,曹娟華1
(1. 南昌大學 機電工程學院,江西 南昌 330031;2. 南昌航空大學 航空制造工程學院,江西 南昌 330063;3. 江西科技學院 汽車工程學院,江西 南昌 330098)
軌道靜檢中的長波測量是鐵路平順性檢測中非常關鍵的一環。現行的長波相對測量法為一測回法,其所作的長波計算是基于軌檢儀的角速度積分而作,而非真正的平面曲線轉角和豎曲線轉角。為獲取此2轉角,必須計算軌檢儀推行經過各測點的姿態角,其中真方位角的增量即為平面曲線轉角,而坡度角增量即豎曲線轉角。本文使用多子樣旋轉矢量法以獲取軌檢儀推行過程中的實時姿態角,并修正原長波計算中小弦測值算法。線上實驗表明,修正后一測回法的長波測值與原一測回法所測值在曲線半徑較小時差異非常大,但即使在一般高鐵曲線半徑之下,其高低差異亦不容忽視。本文提出的修正方法對于現行的長波相對測量非常必要,能大大提高其測量精度。
長波;一測回法;姿態角;多子樣旋轉矢量法;小弦測值

我國鐵路近年來的不斷提速對軌道質量提出了更高的要求,也對軌道不平順檢測精度提出了更嚴苛的要求。因為軌道不平順正是軌道質量狀態的體現,影響著列車運行安全與乘坐舒適性[1]。軌道不平順按有無輪載作用分為靜態和動態不平順[2]。前者主要反映軌道部分不平順,后者則是軌道和軌下結構狀態的綜合反映,兩者并不存在一一對應的函數關系[3]。作為工務養修作業的直接依據,靜態測量結果殊為重要[4]。靜檢設備常為輕型軌檢小 車[2],其中作相對測量[5]者稱為軌檢儀,作絕對測量[5]者稱為軌道測量儀;動檢設備一般為大型軌檢車或安裝于運營車輛上作在線檢測[6]。世界各國測量高低、軌向不平順的方法主要有弦測法和慣性基準法2類。弦測法中的三點中弦法(又稱正矢法)為目前國內外大多數軌檢儀采用。而慣性基準法中只有質量彈簧系統加速度積分與位移相加法為國內外軌檢車普遍采用,成為實用化的“慣性基準法”。理論上該法可測出任意波長的軌道不平順,但為了濾除無需測量的頻率極低、變化緩慢、數值很大的軌道變化,須引入高通濾波器;并且需對由于車體傾斜、側滾而使加速度計產生的相應輸出進行修正,才能得到精度較高的結果[2]。隨著列車運行速度提高,以往對列車輪軌動力作用影響不明顯的長波不平順(波長30~200 m)逐漸成為影響高速列車運行安全性、平穩性和舒適性的主要因素[7]。高速列車車體主振頻率多在1 Hz左右[8],當列車速度為250 km/h時,最不利波長約為70 m。目前國內外已對中短波軌道不平順進行了大量的研究,但對長波不平順的相關問題的研究卻有所欠缺[9?10]。將近年來有關軌道長波不平順檢測的研究按動檢和靜檢分類發現,前者大多仍是采用慣性基準法,而后者則依然是以弦測法為基礎。動檢類研究有:鄭樹彬等[11]基于慣性測量原理提出于動檢中獲取加速度、隙距和速度信號進行積分、濾波以提取長波信息;陸珠興等[12]亦是從加速度信號中提取軌道長波不平順特征;盛文娟等[13]針對動檢獲得的加速度信號用分數傅里葉變換分析長波不平順;朱文發等[14]提出可基于捷聯慣性系統進行軌道長波不平順檢測,但未給出具體實施方法和實驗結果;邢宗義 等[6]提出基于構架點頭角速度的軌道垂向長波不平順在線檢測方法;HUANG等[15]提出將慣性基準法采集信號進行濾波、積分等環節得到所需波長不平順的方法。這些研究的重心大多是在信號濾波上,鮮少見研究加速度計因車體傾斜、側滾而產生的測量誤差。靜檢類研究有:魏暉等[4]提出用相對測量代替絕對測量的長波不平順快速測量法;李陽騰龍等[16]批判德鐵30 m弦和300 m弦中長波平順指標,提出高密度四點偏差約束軌道方向高低模型;張明等[17]提出用工業相機采集激光靶面圖像,利用圖像處理技術提取激光光斑中心坐標的長波不平順激光檢測方法;王源等[18]對軌道不平順多點弦測法進行了誤差分析。由于靜態長波不平順的絕對測量或激光檢測法測量效率和測點密度較相對測量低很多,且其精度對環境及操作準確性的依賴較強[19],故目前傾向于用軌檢儀測取靜態長波高低與軌向值。不失一般性,下文將以70 m長波高低和軌向的相對測量作為研究對象。目前較高精度的長波相對測量法主要為一測回法,即在同一段線路上往返推,以消除順里程與逆里程測量時的共同誤差[20]。由于在現行一測回法中,長波是基于軌檢儀角速度積分而非實際曲線轉角計算,故其精度尚有待提高。為此,本文研究了解算實際曲線轉角的方法,修正了長波計算中的小弦測值算法,以提高一測回法的長波測量精度。
1 長波數據具體測量方法
無論靜態測量采用何種測量技術路線,其測量結果常常會以“特定弦長的矢距”,即弦測法形式來表達[3]。一般說來,關注何種波長的不平順即測量何種弦長的中點弦測值(即“中點矢距”)。

圖1 70 m長波軌向值示意圖
具體說來,某測點的70 m長波軌向,指的是該點在軌道平面曲線上的70 m弦中點弦測值,如圖1所示;而其70 m長波高低值,則是該點在軌道豎曲線上的70 m弦中點弦測值。
相對測量時,軌檢儀可直接測得其在相鄰測點間行走的角速度積分,其推行示意圖如圖2所示——軌檢儀外廓呈T形,橫梁與鐵軌正交,側臂置于右軌上[20]。為測得軌向和高低,其橫梁與側臂交叉處正交配置有2個單軸光纖陀螺儀(FOG)[20]:軌向FOG的盤面平行于軌道面,敏感軸垂直該面向下;高低FOG盤面垂直于軌道面,敏感軸平行該面從左軌指向右軌[20]。現行一測回法就是用這2個FOG分別進行載體坐標系(O?bbb)下b與b2軸向角速度的測量,并把這2個角速度積分近似當作平面曲線和豎曲線轉角進行長波計算。
一測回法的70 m長波計算公式是根據“以小推大”公式推得[21],因此需先算小弦測值,才能計算大弦測值(即70 m弦測值)。因本文以江西日月明測控科技股份有限公司的軌檢儀作為實驗用機,采樣密度為每0.125 m一個測點,故其長波計算的小弦測值為0.25 m弦的中點弦測值。現行小弦測值計算公式如下:
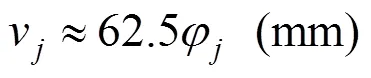
式中:v為測點的0.25 m弦測值,φ(rad)為測點-1到測點的曲線轉角,如圖3所示。
使用式(1)進行“以小推大”所得的70 m長波計算公式如下:


式中參數如圖4所示[20]。

圖2 軌檢儀示意圖
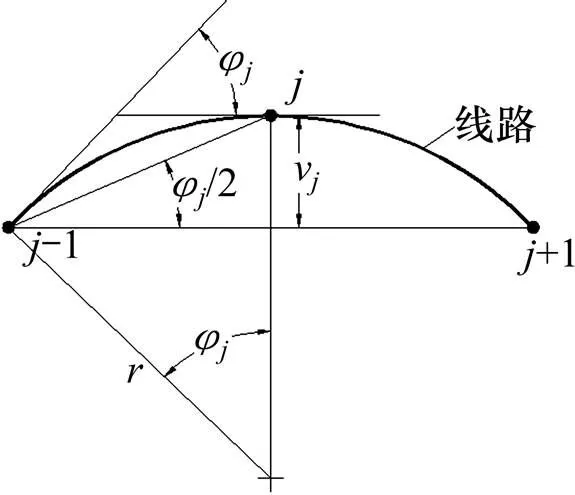
圖3 現行小弦測值求解方法示意圖
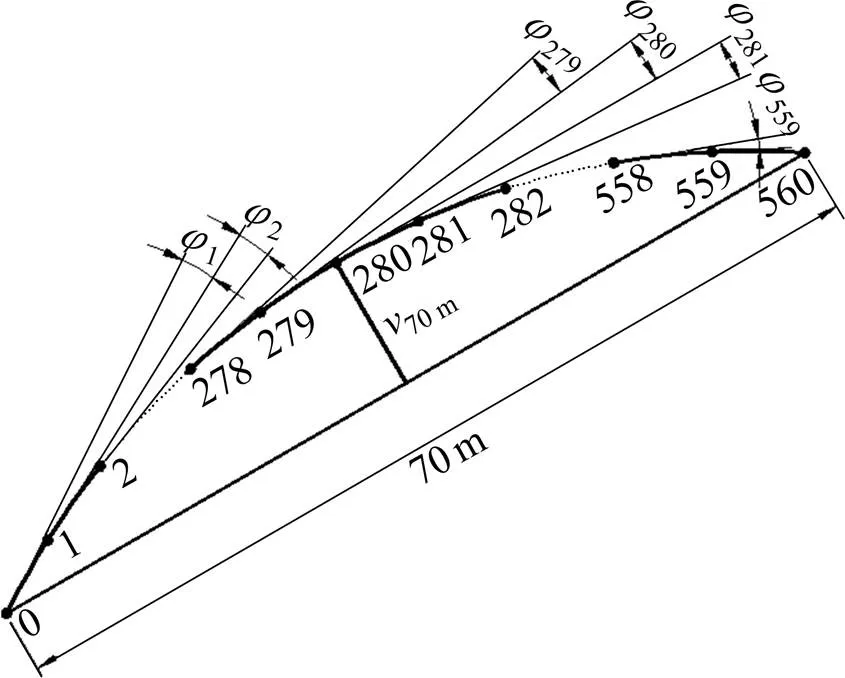
圖4 “以小推大”求解70 m長波示意圖
2 用角速度積分求解長波的弊端
現行一測回法將軌向和高低FOG輸出的角速度積分近似當作實際軌道平面曲線和豎曲線上轉角進行長波軌向和高低計算——這種近似緣于多數軌道平面都呈近似水平狀態。因此,測量時為了方便常將軌向FOG敏感軸視作總鉛垂向下,而將高低FOG敏感軸視作總是水平方向。
但在軌檢儀推行過程中,軌向和高低2個FOG的敏感軸方向其實一直在變。將不同方向的角速度積分相加,所得量雖具有角度量綱,但一般情況下并無明確物理意義。

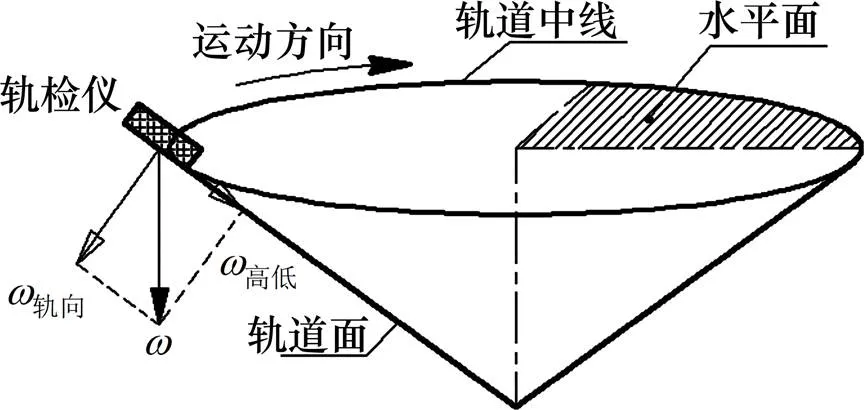
圖5 軌檢儀圓曲線上勻速推行圖示
現行一測回法的這一近似做法可能給長波測量帶來不可忽視的誤差,尤其是在圓曲半徑較小的情況下。它對短波精度的影響幾可忽略,是因為在10~20 m線路范圍內,FOG敏感軸方向的變化確實很小,但在70~120 m范圍內,敏感軸方向的變化常常是難以忽略的。
實際軌道平面曲線的轉角為軌檢儀方位角增量,豎曲線轉角為軌檢儀坡度角增量。因此要進行準確的長波計算,需先測得軌檢儀實時姿態角。
3 姿態角求解方法
姿態角的求解至少需測量載體3個維度上的角速度,如圖2中軌檢儀b,b和b三軸上的角速度。但在日月明公司所生產軌檢儀上,b向的角速度并未配備FOG測量。由于該軌檢儀3個姿態角——真方位角、坡度角和超高傾角(如圖6所示[20])之中,系直接由傾角傳感器測得,故使用姿態角4階龍格庫塔算法推導得出,b軸的角速度積分可如下求解:
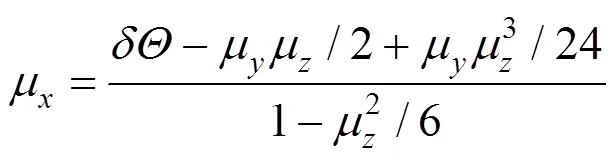
式中:μy和μz是相鄰測點間yb和zb軸的角速度積分,為相鄰點間超高傾角增量。
求得相鄰測點間軌檢儀的對地角速度積分=[μ,μ,μ]T后,即可使用多子樣旋轉矢量法根據每小段角速度積分(=1, 2, 3, …)進行姿態角求解。雖然多子樣旋轉矢量法原本是將姿態更新時間間隔等分來獲取子樣,但其本意是要每個小區間的子樣間差異不過大,故此處將時域等分廣義化為路程等分,將每小段線路的角速度積分作為子樣。
軌檢儀姿態角具體算法如圖7所示,主要使用四子樣旋轉矢量優化算法(RV4),個別地方(即前3個測點)使用單子樣(RV1)、雙子樣(RV2)和三子樣旋轉矢量算法(RV3)。
目前,多子樣旋轉矢量姿態算法方面的文獻其實有很多,除四子樣經典優化算法外,還有五子 樣[22]、六子樣[23]甚至八子樣優化算法[24]。但通過實驗比較發現,五子樣、六子樣優化算法在長波測量中的使用效果并不比經典RV4算法[25]更好,故此仍主要使用RV4算法進行軌檢儀姿態計算。
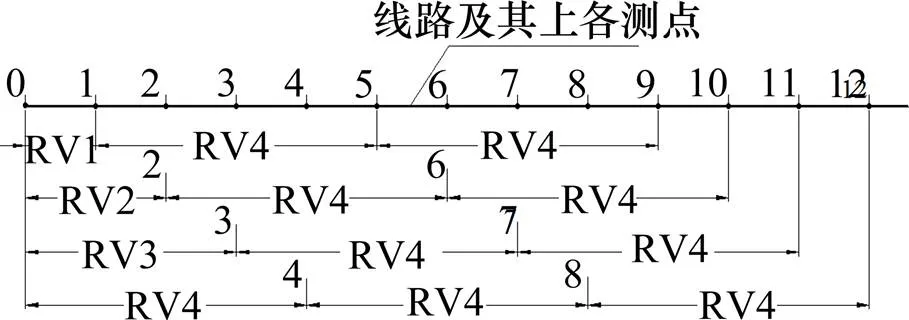
圖7 各測點姿態角算法示意圖
求得軌檢儀在每個測點的方位角與坡度角后,其相鄰測點間的方位角增量即為實際平面曲線轉角,而坡度角增量即為實際豎曲線轉角。
4 小弦測值算法的修正
“以小推大”公式原本如下:

式中:70 m(i)指第個測點處的70 m長波值;v指第個測點的0.25 m弦測值。
現行小弦測值v的算法,即式(1),是基于測點前一小段和后一小段曲率半徑相同、轉角相同的假設而來,如圖3所示。但如果遇到圖8所示情況,該算法的誤差就較大了——因為此時φ為0,若按式(1)計算,小弦測值v即為0,這顯然并非事實。可見,欲求0.25 m弦測值,不能只使用其中0.125 m的轉角,將前后0.125 m的轉角聯合起來使用才更符合實際。
另外,即使情況如圖3所示,式(1)也依然是簡化后的結果,實際小弦測值
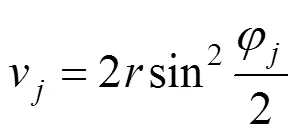
式(5)中:為線路局部曲率半徑。由于一般情況下φ相當小,才將sin2(φ/2)近似為φ2/4,得到式(1)。但如果測量時錯將轉角φ測得過大,那這近似誤差就大了。對比式(1)和式(5),φ如果測錯,那么式(5)中的sin(φ/2)將限制其值不大于1,式(1)卻會因為沒有正弦函數的約束,令v誤差隨φ誤差的增加而不斷增加。當然,因為測量時并不知道局部曲率半徑,式(5)不方便使用;若把=125/φ代入,則又難以控制φ測量不穩定可能帶來的粗大誤差。幾經比較,最終決定將式(5)近似如下:
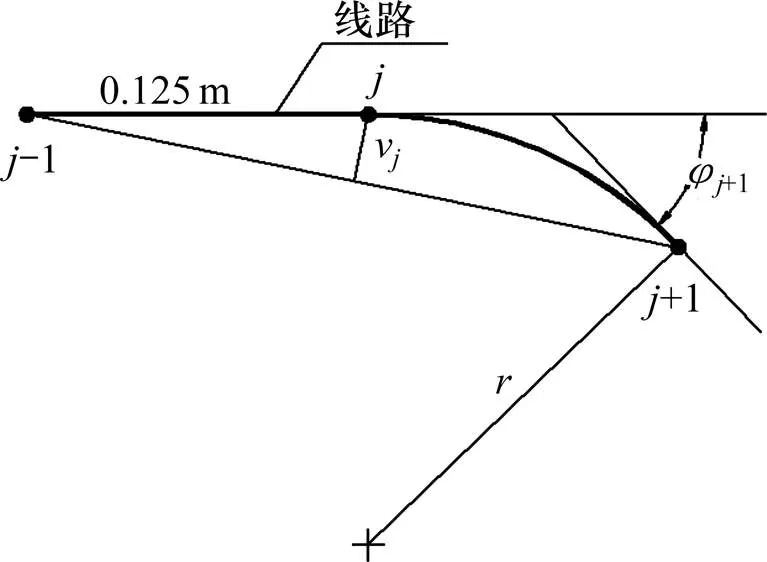
圖8 小弦測值可能情況示意圖
在式(6)的基礎上,考慮測點后0.125 m轉角φ+1對v的影響,將小弦測值計算公式修正為:

不難推出,圖8中測點處的實際小弦測值為:

式中:單位為m,φ+1=0.125/。
表1針對圖8所示情況給出了不同曲率半徑下原小弦測值算法的誤差、修正后小弦測值算法的誤差以及2種算法可能引起的70 m長波測量誤差。顯然,修正后算法可能引起的70 m長波誤差可以忽略不計(70 m長波允許測量誤差為3 mm[20]),而原算法可能引起的70 m長波誤差在曲率變化率為1/320 km/0.125 m時(軌道上非常可能出現的情況)依然有近1 mm。

表1 圖8情況下小弦測值算法修正前后誤差比較
將式(7)代入式(4)整理得到修正后的長波計算公式為:


式中:70 m(i)的單位為mm。
5 實驗結果
在一測回法中,使用上述方法獲得姿態角增量,并用該增量作為轉角φ,按照式(9)進行長波計算——此法本文稱之為“修正后的一測回法”。
分別使用修正后的一測回法和原一測回法在普速鐵路和高速鐵路上實驗。
所選普速鐵路實驗線路包含一完整的單曲線于其中,其資料如下:曲線半徑為800 m,右轉7°1′ 7.44″,緩和曲線長50 m,曲線總長148 m,超高75 mm,直緩點里程0.025 km。該線路上的實驗結果如圖9所示。
圖9中第1幅圖是70 m長波設計值,其高低范圍在[?15.47, 25.06],軌向范圍在[235.24,760.08];第2幅圖是原一測回法測出的70 m長波,高低范圍在[?69.48,57.51],軌向范圍在[277.46,834.02];第3幅圖是修正后一測回法測得的70 m長波,高低范圍在[?46.46,74.58],軌向范圍在[277.75,836.00]。長波軌向實測值和設計值的差異高達100 mm以上,可見該段實驗線路狀況很不良好,實際上這也確實是段年久失修專用于實驗的老線路。在這段線路上,原一測回法與修正后的一測回法之間差異巨大。由圖9中的第4幅圖可知,其高低差范圍在[?39.15,?5.02],軌向差范圍在[?2.45,3.64],可見原一測回法的誤差主要表現在其長波高低值。

圖9 普速實驗線路上一測回法修正前后實驗結果比較
原一測回法在狀況不良的普速線路上誤差巨大。所選高速鐵路實驗線路為新建成的昆玉客專正線上的一段,亦包含一完整單曲線于其中,資料如下:曲線半徑4 504.548 m,右轉7°2′ 22.5″,緩和曲線長180 m,曲線總長733.446 m,超高45 mm,直緩點里程42.904 727 km。該線路上的實驗結果如圖10所示。
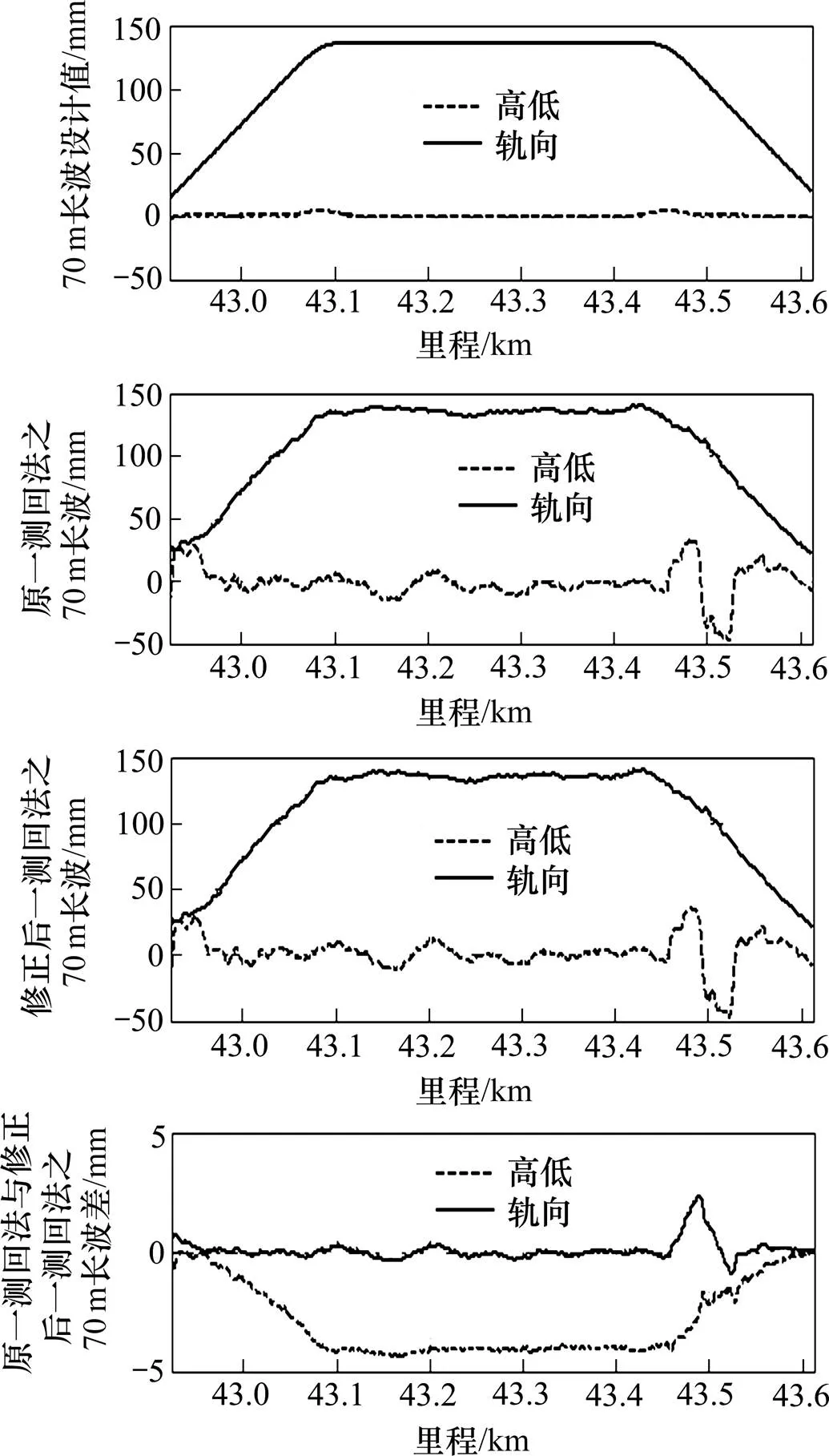
圖10 高速實驗線路上一測回法修正前后實驗結果比較
圖10中,第1到第3幅圖的高低和軌向范圍分別如下:
[?2.00, 4.35],[14.02, 135.97];
[?48.91, 32.04],[20.64, 140.95];
[?47.33, 35.17],[19.95, 140.86]。
需說明的是,現在的高速線路一般為S型順坡,但由于缺乏S型順坡的相關數據,圖10中的高低設計值依然是基于直線順坡的假設而算得,故長波高低設計值與實測值看上去差異甚著。從長波軌向設計值與實測值差異只有幾毫米看,該高速實驗線路的狀況要遠好于上述普速實驗線路。
圖10中第4幅圖的高低和軌向差范圍分別為[?4.40,0.0457]和[?0.966,2.33],這表明即使在狀況良好的高速線路上,原一測回法的誤差仍主要出現在長波高低值上。雖然該高低誤差較普速線路上的誤差已大大減小,但其大范圍近4.4 mm的誤差依然是長波測量中不可容忍的。由此不難推知,在一般情況下,曲線半徑越小則原一測回法的長波測量誤差越大。
圖10中第4幅圖還顯示,原一測回法長波軌向的誤差相對高低小很多,只是在43.5 km處由于高低振蕩幅值較大,連帶影響了長波軌向的測量,使其出現2.33 mm的較大誤差。可見,雖然原一測回法的誤差主要出現在長波高低的測量上,但當線路狀況較差時,連帶長波軌向的測量也會出現不可忽視的誤差。
綜上所述,對現行一測回法進行上述修正對長波測量而言是必須的,能大幅提升其測量精度。
6 結論
1) 介紹了現行的長波相對測量方法——一測回法,并分析其使用角速度積分進行長波計算的弊病所在以及原小弦測值算法可能導致的誤差,提出應使用姿態角增量進行長波計算并修正小弦測值算法。
2) 提出了在所使用軌檢儀現有條件(2個FOG加一個傾角傳感器)下的具體姿態角算法。
3) 修正了長波計算中的小弦測值算法,盡可能地減小了長波測量誤差。
4) 展示了普速線路和高速線路上一測回法修正前后的實驗結果,證明修正前后的長波測量結果差異很大,超出長波允許測量誤差3 mm,尤其是在狀況不良線路上。因此,本文對現有長波相對測量方法所作的修正非常必要。
5) 除了用于一測回法,本文的修正方法亦可用于相對測量中的半測回法。
[1] 馮超, 余朝剛, 孫雷, 等. 基于改進GM(1,1)與WOA- LSSVM組合預測模型的軌道不平順預測[J]. 鐵道標準設計, 2019(4): 34?39, 46. FENG Chao, YU Chaogang, SUN Lei, et al. Prediction of track irregularity based on improved GM(1,1) and WOA- LSSVM combination model[J]. Railway Standard Design, 2019(4): 34?39, 46.
[2] 羅林, 張格明, 吳旺青, 等. 輪軌系統軌道平順狀態的控制[M]. 北京: 中國鐵道出版社, 2006. LUO Lin, ZHANG Geming, WU Wangqing, et al. Control of track smooth state of wheel rail system[M]. Beijing: China Railway Press, 2006.
[3] 魏暉. 高速鐵路軌道平順性靜態檢測理論與精調技術研究[D]. 南昌: 南昌大學, 2014. WEI Hui. Research on the track irregularities survey theory and relevant adjustment technologies of HSR track[D]. Nanchang: Nanchang University, 2014.
[4] 魏暉, 朱洪濤, 殷華, 等. 高鐵軌道平順性的150 m/ 300 m校驗及其快速測量[J]. 鐵道工程學報, 2015, 32(1): 44?48, 54. WEI Hui, ZHU Hongtao, YIN Hua, et al. 150 m/300 m check for the irregularities of HSR and its rapid survey[J]. Journal of Railway Engineering Society, 2015, 32(1): 44?48, 54.
[5] TB/T 3147—2012, 鐵路軌道檢查儀[S]. TB/T 3147—2012, Inspecting instrument for static geometry parameter of track[S].
[6] 邢宗義, 陳岳劍, 王曉浩, 等. 基于構架點頭角速度的軌道垂向長波不平順在線檢測[J]. 中國鐵道科學, 2015, 36(4): 32?39.XING Zongyi, CHEN Yuejian, WANG Xiaohao, et al. On-line detection of vertical long wavelength track irregularities using bogie pitch rate[J]. China Railway Science, 2015, 36(4): 32?39.
[7] WANG Z, SONG Y, GUO G. Study on allowable safety speed criterion of long wave track irregularity of high-speed railway[J]. Journal of Residuals Science & Technology, 2016, 13(7): 175.1?175.4.
[8] Hung C F, Hsu W L. Influence of long-wavelength track irregularities on the motion of a high-speed train[J]. Vehicle System Dynamics, 2018, 56(1): 95?112.
[9] 吳曉峰. 杭長高鐵長波高低不平順問題的研究與分析[J]. 上海鐵道科技, 2015(3): 8?9, 19. WU Xiaofeng. Research and analysis on the long wave height irregularity of Hangchang high speed railway[J]. Shanghai Railway Science & Technology, 2015(3): 8?9, 19.
[10] XIN Tao, WANG Pengsong, DING Yu. Effect of long- wavelength track irregularities on vehicle dynamic responses[J]. Shock and Vibration, 2019, 2019: 1?11.
[11] ZHENG Shubin, LIN Jianhui, LIN Guobin. Long-wave irregularity detection of high-speed maglev track[C]// 2007 8th International Conference on Electronic Measurement and Instruments, August 16-July 18, 2007. Xian, China. New York, USA: IEEE, 2007.
[12] 陸珠興, 蘇燕辰, 李華超. 軌道長波不平順檢測系統設計[J]. 中國測試技術, 2007, 33(2): 16?18, 56. LU Zhuxing, SU Yanchen, LI Huachao. Designing of long wave track irregularity inspection system[J]. China Measurement Technology, 2007, 33(2): 16?18, 56.
[13] SHENG Wenjuan, GUO Aihuang. Analysis of track long-wave irregularity with fractional Fourier transform[C]// 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, September 24?26, 2009. Beijing, China. New York, USA: IEEE, 2009.
[14] 朱文發, 柴曉冬, 鄭樹彬, 等. 基于捷聯慣性系統的軌道長波不平順檢測[J]. 城市軌道交通研究, 2012, 15(11): 87?90. ZHU Wenfa, CHAI Xiaodong, ZHENG Shubin, et al. Detection of track long-wave irregularity based on SINS[J]. Urban Mass Transit, 2012, 15(11): 87?90.
[15] HUANG Jingyu, WU Zhewei, SHI Jin, et al. Influence of track irregularities in high-speed Maglev transportation systems[J]. Smart Structures and Systems, 2018, 21(5): 571?582.
[16] 李陽騰龍, 岑敏儀, 馬國治. 高速鐵路軌道中長波不平順檢測模型研究[J]. 鐵道學報, 2017, 39(2): 112?118. LI Yangtenglong, CEN Minyi, MA Guozhi. Study on a novel inspection model of middle and long wave irregularities of track in high-speed railways[J]. Journal of the China Railway Society, 2017, 39(2): 112?118.
[17] 張明. 圖像處理技術在軌道平順度檢測中的應用研究[J]. 鐵路計算機應用, 2017, 26(6): 7?10. ZHANG Ming. Application of image processing technology in detection of track flatness and smoothness [J]. Railway Computer Application, 2017, 26(6): 7?10.
[18] WANG Yuan, TANG Huiyue, WANG Ping, et al. Multipoint chord reference system for track irregularity: Part II?Numerical analysis[J]. Measurement, 2019, 138: 194?205.
[19] 熊麗娟, 朱洪濤, 魏暉, 等. 基于軌道相對測量數據識別曲線關鍵參數的研究[J]. 鐵道學報, 2018, 40(4): 127?134. XIONG Lijuan, ZHU Hongtao, WEI Hui, et al. Research on curve key-parameter identification based upon track relative survey data[J]. Journal of the China Railway Society, 2018, 40(4): 127?134.
[20] 熊麗娟, 朱洪濤, 王志勇, 等. 軌道長波不平順半測回法測量精度的研究(Ⅰ)[J]. 鐵道學報, 2019, 41(6): 130? 136. XIONG Lijuan, ZHU Hongtao, WANG Zhiyong, et al. Study on improving accuracy of track long-wave irregularity measured by semi-observation method(Ⅰ)[J]. Journal of the China Railway Society, 2019, 41(6): 130? 136.
[21] 朱洪濤, 魏暉, 王志勇, 等. 軌檢儀弦測法“以小推大”檢查軌道軌向不平順的理論研究[J]. 鐵道學報, 2007, 29(1): 36?40. ZHU Hongtao, WEI Hui, WANG Zhiyong, et al. Discussion on inspection of track alignment irregularities according to method of chord measuring and its “Using small fetch big”[J]. Journal of the China Railway Society, 2007, 29(1): 36?40.
[22] 靳聰, 趙修斌, 許云達, 等. 捷聯姿態解算五子樣等效旋轉矢量算法研究[J]. 科學技術與工程, 2014, 14(29): 96?99. JIN Cong, ZHAO Xiubin, XU Yunda, et al. Research on five-sample algorithm for attitude updating of SINS[J]. Science Technology and Engineering, 2014, 14(29): 96?99.
[23] 何矞, 任凱升, 南英. 捷聯慣導姿態更新的六子樣旋轉矢量優化算法研究[J]. 南昌航空大學學報(自然科學版), 2008, 22(2): 35?38. HE Yu, REN Kaisheng, NAN Ying. Research on optimal six-sample rotation vector algorithms for SINS attitude updating[J]. Journal of Nanchang Hangkong University (Natural Science), 2008, 22(2): 35?38.
[24] LI Lianpeng, XIE Lun, SU Zhong. Research on optimal eight-sample rotation vector algorithm for SINS attitude updating[J]. Journal Computers, 2018, 29(2): 136?144.
[25] Jang G Lee, John G Mark, Daniel A Tazartes, et al. Extension of strapdown attitude algorithm for high- frequency base motion[J]. Journal of Guidance Control and Dynamics, 1988, 13(4): 738?743.
Correction of the long-wave calculation method in relative measurement of track static inspection
XIONG Lijuan1, 2, ZHU Hongtao1, WU Weijun1, WEI Hui3, CAO Juanhua1
(1. School of Electromechanical Engineering, Nanchang University, Nanchang 330031, China; 2. School of Aeronautical Manufacturing Engineering, Nanchang Hangkong University, Nanchang 330063, China;3. School of Automotive Engineering, Jiangxi University of Technology, Nanchang 330098, China)
Long-wave measurement in track static inspection is a very critical part for the test of railway smoothness. The current long-wave relative measurement method is purely observation method, of which the long-wave calculation is based on the angular velocity integral of the track detector, rather than the true plane curve turn-angle and vertical curve turn-angle. In order to obtain the two types of turn-angles, it is necessary to calculate the attitude angles of the track detector through each measuring point, wherein the increment of true azimuth is the plane curve turn-angle, and the increment of slope angle is the vertical curve one. In this paper, the multi-subsample rotation vector method was used to obtain the real-time attitude angles during the application of the track detector, while the small-chord versine algorithm in the original long-wave calculation was modified. The railway experiments show that the long-wave measured by the modified full-observation method is very different from the value measured by the original full-observation method when the curve radius is small, but even under the general high-speed curve radius, the difference between their longitudinal long-wave values cannot be ignored. Therefore, the correction method proposed in this paper is very necessary for the current long-wave relative measurement, and would greatly improve the long-wave measurement accuracy.
long-wave; full-observation method; attitude angles; multi-subsample rotation vector method; small-chord versine
U216.3
A
1672 ? 7029(2020)02 ? 0326 ? 09
10.19713/j.cnki.43?1423/u.T20190307
2019?04?15
國家自然科學基金資助項目(51468042);江西省重點研發計劃項目(20161BBE50079)
朱洪濤(1962?),男,湖南雙峰人,教授,從事鐵道檢測技術研究;E?mail:honey62@163.com
(編輯 涂鵬)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00