空間機器人遙操作系統設計
2020-03-10 02:15:14,,
機械與電子 2020年2期
,,
(1.重慶交通職業學院,重慶 402247;2.哈爾濱工業大學機器人技術與系統國家重點實驗室,黑龍江 哈爾濱150001;3.中國科學院深圳先進技術研究院,廣東 深圳 518055)
0 引言
一方面衛星和空間站對于人類的生活影響日益增長,另一方面太空的惡劣環境和有限的燃料使得航天器壽命較短,因此在軌維護成為了重要的研究方向[1]。考慮到太空的惡劣環境和節約成本等因素,用空間機器人代替航天員執行任務成為了近年來的研究熱點。然而,由于當前科技水平的限制,目前無法實現全自動的空間機器人。因此能夠在地面幫助人類操縱空間機器人的遙操作系統成為了當下的一個重要研究主題[2-9]。
近年來,各國都開展了空間機器人及其遙操作系統的研究。比如德國早在1993年做了空間機器人實驗(ROTEX)[7],日本在1997年發射了ETS-7號衛星,并在接下來的幾年也做了豐富的遙操作實驗[6]。這些實驗不僅驗證了空間目標捕獲和對接技術,還為未來空間站上的機械臂及其遙操作系統的設計積累了豐富的經驗。除了日本的ETS-7號和德國的ROTEX成功完成實驗外,正在研制中的空間機器人還有美國的SUMO/FREND和歐空局的TECSAS/DEOS。
中國在過去的十年里也開展了空間機器人方面的實驗研究,并于2013年發射了試驗七號空間機器人實驗平臺,實驗目的是驗證在軌維護技術, 實驗系統由2個子系統組成,分別是在軌子系統和地面子系統[10]。本文以試驗七號為實驗平臺對其地面遙操作系統進行設計。
1 空間機器人實驗系統組成
1.1 在軌子系統
在軌子系統由3個子系統組成,分別是自由漂浮平臺子系統、空間操作機器人子系統和目標衛星子系統。其中空間操作機器人子系統由1個6自由度機械臂、手眼相機和2個手指構成。空間操作機器人子系統和目標衛星子系統分別固連在自由漂浮平臺的相鄰2個平面上[5],如圖1所示。
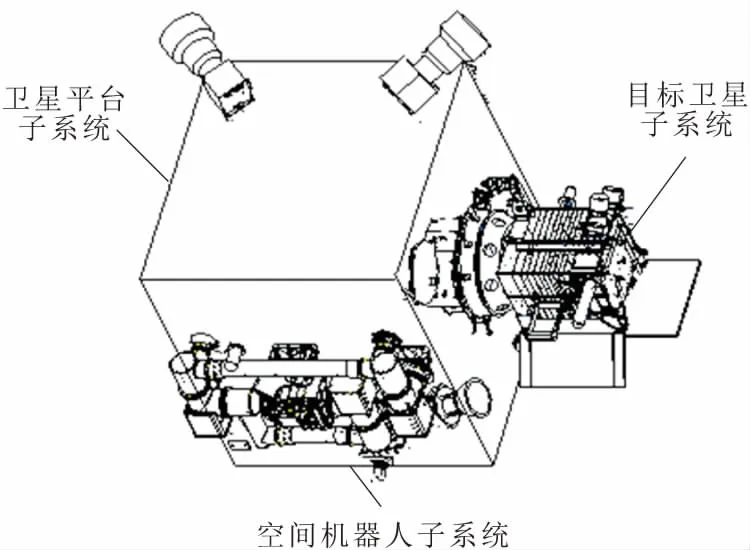
圖1 空間機器人在軌子系統
1.2 地面子系統
地面子系統包括遙操作子系統和遙測控子系統(TM/TC)。TM/TC是在軌子系統和遙操作子系統之間進行數據交換的中樞,并且與地面遙操作子系統之間通過UDP組播的方式相連。TM/TC一面將在軌子系統上得到的遙測數據傳送給地面遙操作系統,另一方面又將地面遙操作數據以指令的形式發送給在軌子系統。同時還將對雙向傳送的數據進行實時監控,地面子系統和在軌子系統的鏈接關系如圖2所示。
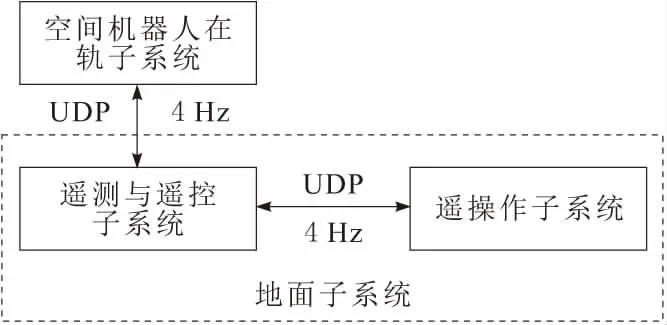
圖2 在軌子系統和地面子系統的鏈接關系
1.3 遙操作子系統
地面遙操作系統由圖像監控軟件、預測仿真軟件、任務規劃軟件、操作手柄和操作者組成。
a.圖像監控軟件。圖像監控軟件通過UDP組播和遙測子系統相連,以4 Hz的頻率接收空間機器人的2個手眼相機和衛星上一個全局相機所拍到的圖片,所有相機都使用黑白的CCD相機。圖像監控軟件可以輔助操作者來判斷空間機器人的當前工作狀態是否良好,還可以和接收到的關節數據相互驗證并給操作者以直觀感受。
b.預測仿真軟件。預測仿真軟件通過TCP/IP協議與任務規劃軟件相連,并實時接收任務規劃發過來關節角度數據,通過實體模型和虛線模型分別顯示當前規劃關節角和接收的滯后關節角,以100 Hz的頻率進行刷新顯示。預測仿真軟件使用Open Inventor同時進行實時和超前碰撞檢測,并將碰撞檢測信息實時傳送給任務規劃軟件。
c.任務規劃軟件。任務規劃軟件通過UDP組播和TM/TC相連發,并通過TCP/IP和預測仿真軟件相連進行實時顯示和接收碰撞檢測結果,任務規劃軟件的功能為:關節空間或笛卡爾空間下的軌跡規劃功能;單關節鎖死時的容錯規劃功能;主從/雙邊遙操作功能;實時數據顯示與檢測;數據保存功能。
d.操作手柄。本系統選用Haption公司的Virtuose 6D35-45型力反饋設備作為主端操作手柄。手柄通過TCP/IP與任務規劃軟件相連,任務規劃軟件實時的讀取手柄的位置和姿態信息并通過坐標變換變換為空間機器人的位姿增量。
遙操作子系統的各部分鏈接關系如圖3所示。

圖3 遙操作子系統結構
2 遙操作子系統的設計與實驗
2.1 實時遙編程功能
由于衛星軌道高度較低,相應的時間窗口較短,所以要實現在線自定義遙編程就需要快速判斷設計的路徑是否合理。“實時遙編程功能”中的“實時”指的是將規劃后的軌跡以10倍于正常運行的速度發送給預測仿真軟件并進行合理性驗證,如果軌跡設計合理則再向實際衛星發送。
由于實際機械臂響應能力的限制,只有限制發送的關節角速度和角加速度在一定的范圍內才能保證實際機械臂的跟蹤精度。在給出終止位置和規劃時間后,任務規劃軟件會根據生成的數據計算運動過程中最大角速度和角加速度,如果超出實際機械臂的響應能力則給出提示并給出最小的規劃時間。然后再將驗證后的軌跡發送至空間機器人執行。關節空間規劃包括從當前位置到安全位置,從安全位置到觀測起始位置。笛卡爾空間軌跡規劃包括從觀察起始位置到觀測終止位置的直線軌跡規劃和從圓弧軌跡規劃。基于觀測任務的直線軌跡規劃如圖4所示。
圖4 直線軌跡規劃
在笛卡爾空間下的起始坐標為(1.045 9, 0, 0.114 9),終止坐標為(1.046, 0.6, 0.115)。在進行直線運動的過程中,末端姿態始終保持不變,其Z-Y-X歐拉角為(180, 0, 0)。圓弧軌跡規劃如圖5所示。
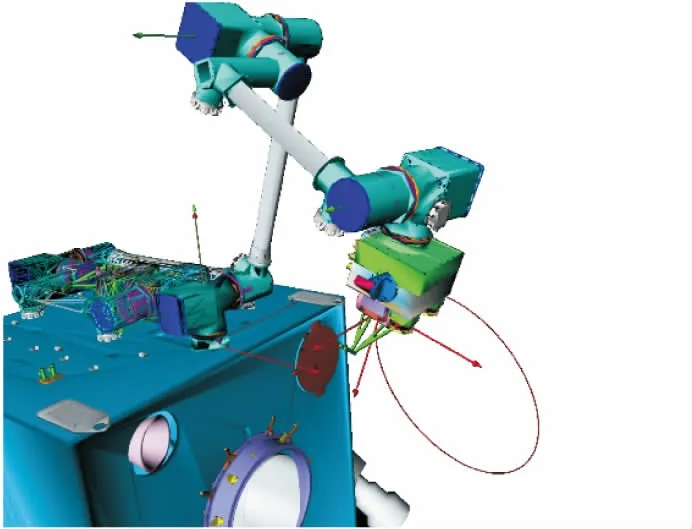
圖5 直線軌跡規劃
2.2 遙操作功能
當操作者進行觀測成像任務時,根據任務的不同可以分為3種操作模式。
2.2.1 位置控制模式
操作手控器時只能改變空間機械臂末端的位置。當操作者對遠處物體進行觀測的時候,希望盡可能保持姿態不變,而只改變手眼相機的位置。將當前的手柄位置設置為坐標原點,每250 ms將當前位置與原點位置做差得到增量向量。將增量向量通過坐標變換變換到空間機器人操作平面下,再將該增量累加到空間機器人的當前位置上。最后進行逆運動學計算得到空間機器人的關節角數據并發送。
2.2.2 姿態控制模式
操作手控器時只能改變空間機械臂末端的姿態。為了減少操作者的負擔,姿態控制采用提取角速度增量的方法來實現。按住手柄右鍵并旋轉,得到手控器角速度增量,按下手柄左鍵則清零角速度增量。將角速度增量通過坐標變換變換到空間機器人操作平面下不斷累加,再實時進行逆運動學計算得到關節角數據。
2.2.3 位姿控制模式
操作手控器時同時改變空間機械臂末端的位置和姿態。
遙操作系統具有主從和雙邊遙操作2種控制模式。因為空間機器人的機械臂沒有安裝力覺傳感器,所以遙操作的主端和從端之間只能相互傳遞關節的位置信息。這樣,在雙邊力反饋模式下,反饋力的計算只能根據主端輸入的笛卡爾位置和當前收到的從端位置的差值來計算,即
Fmc=Kf(xm-xsd)
(1)
Fmc是計算得到虛擬反饋力;Kf是比例系數;xm和xsd是任務規劃軟件在主端發送和接收的末端位置數據。
在非接觸環境下自由運動時,時延的大小和變化將以反饋力的形式傳遞給操作者,便于操作者根據時延大小實時調整手柄運動的速度。圖6和圖7顯示了在位置控制模式下執行非接觸任務時的實驗,時延為7 s。
以上仿真實驗說明了空間機器人操作者可以根據時延大小實時調整手柄運動的速度,驗證了遙操作系統基于時延的雙邊力反饋功能的有效性。
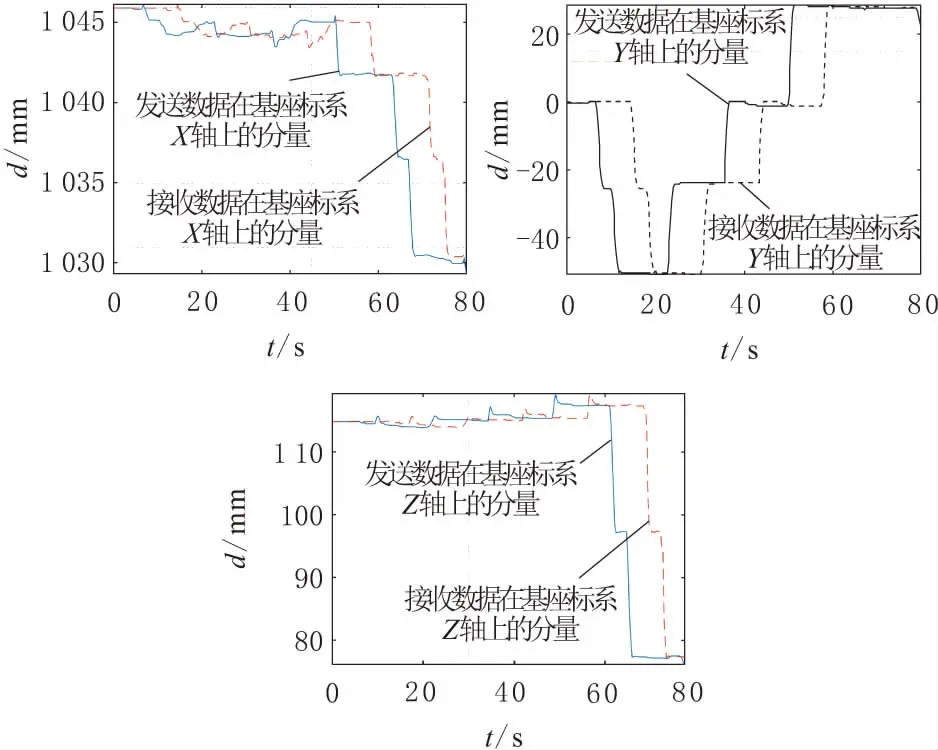
圖6 發送和接收的位置數據

圖7 計算的虛擬反饋力
2.3 故障關節軌跡規劃
如果空間機器人在運行的過程中某個關節故障并鎖定在某一角度值,那么如何使其仍舊完成指定的觀測和抓捕任務,將是一個值得研究的問題。因此模擬了在2關節故障的情況下,通過容錯規劃保證固定姿態來完成觀測成像任務。實驗設計中使用數值逼近的方法在原軌跡規劃的每個中間點附近尋找能夠保證姿態變動較小的最近的點。比如要執行沿著直線進行的觀測任務的軌跡,在進行這種處理后能夠得到在關節2故障下的規劃軌跡如圖8所示。
由圖8可以看到通過容錯規劃前后,X軸、Y軸上的軌跡不變,Z軸上的軌跡由直線變為曲線,總軌跡變為曲線。但因關節角不變,保持相同的姿態仍舊可以完成指定的觀測和抓捕任務。
如圖9所示,假設故障關節角度鎖定在-123.8°。在原始軌跡規劃下,關節2的初始角度從-120.21°變為-127.32°,變化比較大;而在容錯規劃下,關節2角度保持近似不變。作為故障軌跡規劃中最重要的優化指標,關節角度變化越小,越能保證空間機器人以固定姿態完成觀測成像任務。
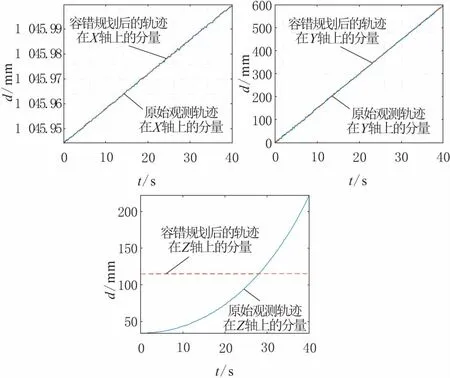
圖8 笛卡爾空間中的原始觀測軌跡與容錯規劃軌跡
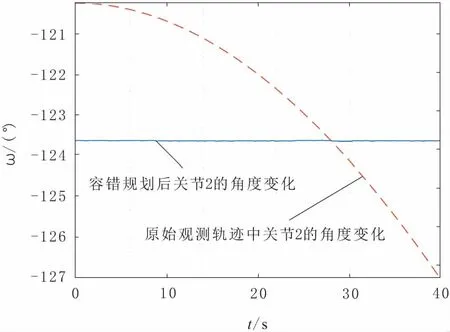
圖9 關節2在原始規劃和容錯規劃下的角度變化
3 碰撞檢測實驗與額外時延法
在遙編程模式下,可以利用實時遙編程功能對路徑的合理性做充分的驗證以避免碰撞的發生。在遙操作模式下,由于人為操作帶有一定隨機性,因此實時的碰撞檢測更加重要。本系統的碰撞檢測功能是利用OpenInventor自帶的SoBoundingbox類和SoCollisionManager類實現的,其給每個導入的部件建立了包圍盒(OBB)。當檢測到碰撞時,3D預測仿真軟件以100 Hz的通信頻率向任務規劃軟件發送碰撞檢測信號。
為了增強碰撞檢測功能,在任務規劃和數據管理軟件向遙測中心發送時增加了0.25nds額外的時間延時。當預測模型沒能正確預測碰撞而使得當前規劃的軌跡點發生碰撞時,取出最先存入的沒有發生碰撞的指令來將隊列填滿,保證發出的指令都是遠離碰撞點的安全數據。這樣能夠在發生碰撞時,避免難以找到合適的方向操作機械臂末端從碰撞點離開的問題。額外的延時是由先入先出隊列組成,隊列中依次裝滿nd+1條即將發送的指令,其與遙操作子系統之間的關系如圖10所示。
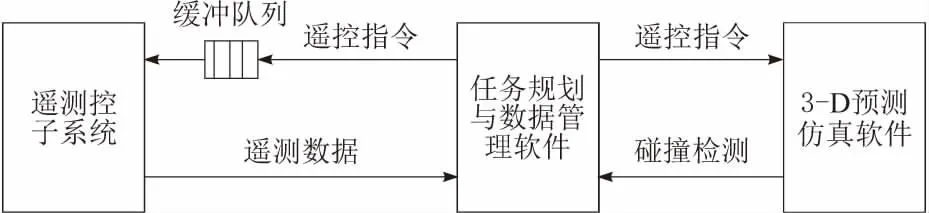
圖10 數據隊列和遙操作子系統數據流
當碰撞檢測發生時,隊列里面立即填滿最先進入的數據,這樣可以確保實際所發送的指令停止在預測模型與包圍盒碰撞之前,如圖11所示。
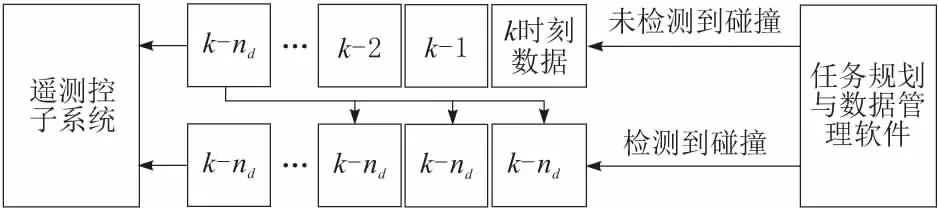
圖11 數據隊列和遙操作子系統數據流
當k時刻未檢測到碰撞時,隊列里即將出棧的是k-nd時刻數據,剛剛進棧的是當前的k時刻數據。此時,如果任務規劃與數據管理軟件接收到了來自3D預測仿真軟件的碰撞檢測信號,說明k時刻的指令數據會引起碰撞,則立即用k-nd時刻未發生碰撞的數據將隊列填滿。碰撞檢測與額外時延的仿真如圖12所示。
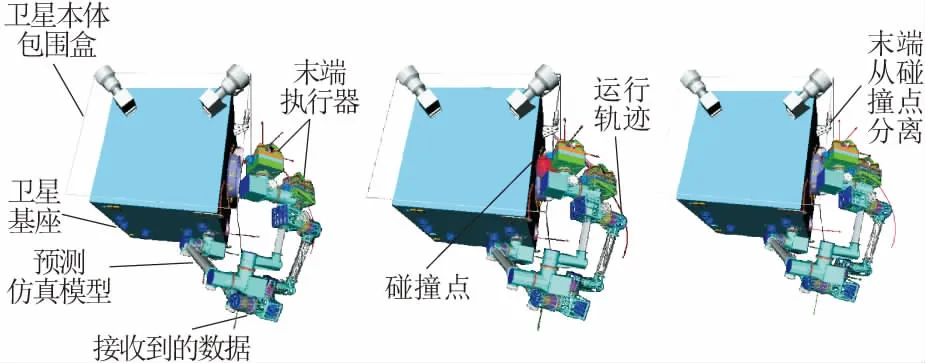
圖12 碰撞檢測與額外時延法的仿真實驗
當預測仿真模型與衛星本體包圍盒發生碰撞后立即回彈到0.25nds秒前未發生碰撞的安全位置,并且在任務規劃與數據處理軟件中給出發生碰撞的提示。該仿真實驗說明了在遙編程模式下,可以利用實時遙編程功能充分驗證路徑合理性,以此避免發生碰撞,驗證了碰撞檢測功能的有效性。
4 結束語
試驗七號空間機器人實驗平臺已于2013年發射升空,實驗任務包括基于手眼相機的自主捕獲技術和地面遙操作技術,為未來中國空間在軌維護任務和中國空間站機械臂的設計打下基礎。本文介紹了試驗七號空間機器人的地面遙操作系統的設計,也為未來空間站機器人的遙操作系統設計打下了實驗基礎,能幫助更多研究者快速、直觀、可靠地規劃空間機器人軌跡。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
公民與法治(2020年11期)2020-07-25 02:02:06
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55