6 000 m深海搜尋無人潛航器工作原理與試驗(yàn)驗(yàn)證
2020-03-09 00:17:12黃習(xí)剛楊偉光
海洋工程裝備與技術(shù) 2020年6期
關(guān)鍵詞:作業(yè)
賀 轍,黃習(xí)剛,楊偉光
(交通運(yùn)輸部南海救助局,廣州 510000)
0 引 言
2014年3月8日,馬航MH370客機(jī)失聯(lián)事件發(fā)生后,救撈系統(tǒng)積極參加了失聯(lián)客機(jī)海上搜尋工作。在充分展示專業(yè)救助和搶險(xiǎn)打撈能力的同時(shí),也暴露出與實(shí)際需要和國際一流水平存在較大差距,其中深海搜尋能力尤為明顯。失聯(lián)客機(jī)搜尋海域水深超過5 000 m,執(zhí)行水域搜尋任務(wù)需要6 000 m級(jí)專業(yè)搜尋定位打撈設(shè)備,彼時(shí)我國救助打撈裝備還未能實(shí)現(xiàn)深海水下遇險(xiǎn)目標(biāo)物的搜尋與探測。
隨著“一帶一路”倡議、海洋強(qiáng)國等國家戰(zhàn)略的推進(jìn)實(shí)施,海上運(yùn)輸通道已成為我國的海上生命線,海上交通安全和船舶溢油風(fēng)險(xiǎn)不斷加大,加之我國海洋開發(fā)活動(dòng)不斷走向深海,東海、南海海洋權(quán)益爭端日益嚴(yán)峻,使深海交通安全形勢更加復(fù)雜,對(duì)提高深遠(yuǎn)海應(yīng)急保障能力需求迫切,水下無人潛航器作為水下探測、目標(biāo)識(shí)別的工具,在深遠(yuǎn)海水下搜尋救助領(lǐng)域的應(yīng)用推廣勢在必行。2015年5月,經(jīng)交通運(yùn)輸部規(guī)劃司以交規(guī)函〔2015〕397號(hào)批復(fù),由南海救助局從冰島Gavia公司引進(jìn)了一套SeaRaptor 6000深海搜尋無人潛航器。
水下無人潛航器(autonomous underwater vehicle,AUV),其主要任務(wù)包括水下自主探測、目標(biāo)識(shí)別等。目前,國外研制并應(yīng)用于深海的AUV主要有美國Hydroid公司的Bluefin-21、英國南安普頓國家海洋中心的Autosub 6000、加拿大ISE公司的EXPLORE、挪威Kongsberg公司的REMUS 6000和HUGIN 4500、法國ECA公司的A6K及冰島Gavia公司的SeaRaptor。國內(nèi)目前也逐漸加大了在深海AUV方面的研究和應(yīng)用的投入,例如沈陽自動(dòng)化研究所研制的CR-02潛龍系列等。
1 AUV總體結(jié)構(gòu)
該套6 000 m深海搜尋無人潛航器,根據(jù)深海搜尋特點(diǎn)和需求,由Teledyne Gavia公司設(shè)計(jì)、制造而成,是我國目前唯一一套通過國外采購應(yīng)用于深遠(yuǎn)海搜尋救助領(lǐng)域的自主式無人潛航器,其最大工作深度可達(dá)6 000 m,潛航器主體長5.5 m,直徑為0.63 m,重1.15 t,最大巡航航速為4 kn,最大續(xù)航力約為400 km。潛航器總體結(jié)構(gòu)布置如圖1所示。

圖1 AUV總體結(jié)構(gòu)
AUV按照功能的不同主要分為負(fù)載、控制、導(dǎo)航定位、推進(jìn)和通信應(yīng)急五大模塊。其中負(fù)載模塊由聲學(xué)探測、光學(xué)探測和水文參數(shù)測量組成,主要集成了側(cè)掃聲吶、多波束測深儀、淺地層剖面儀、水下相機(jī)、黑匣子定位儀、溫鹽深傳感器、前視避碰聲吶等各類探測設(shè)備,用于對(duì)水下遇險(xiǎn)目標(biāo)探測、照相以及海底地形地貌測量;控制模塊是AUV的核心,包括甲板面控制單元及水下潛航體控制系統(tǒng),負(fù)責(zé)AUV任務(wù)管理、測線規(guī)劃和水下自主航行;導(dǎo)航定位模塊包括超短基線定位、慣性導(dǎo)航、多普勒計(jì)程儀和衛(wèi)星定位系統(tǒng),水下作業(yè)通過組合導(dǎo)航的方式為AUV提供實(shí)時(shí)精準(zhǔn)位置信息;推進(jìn)模塊包括電力系統(tǒng)和尾部推進(jìn)系統(tǒng),為AUV水下自主航行提供動(dòng)力;應(yīng)急模塊是深水AUV的關(guān)鍵部分,包括用于與甲板面通信的水聲通信模塊、無線電通信和衛(wèi)星通信,用于保障設(shè)備作業(yè)安全的聲學(xué)釋放器、超短基線信標(biāo)、應(yīng)急定位信標(biāo)、無線電信標(biāo)和頻閃燈等。
2 關(guān)鍵技術(shù)
深海搜尋AUV涉及關(guān)鍵的技術(shù)主要有導(dǎo)航、通信、任務(wù)監(jiān)測控制、測量和數(shù)據(jù)的分析處理等。
2.1 導(dǎo) 航
AUV水下作業(yè)導(dǎo)航采用的是光纖慣性導(dǎo)航(INS)和多普勒計(jì)程儀(DVL)的組合導(dǎo)航系統(tǒng),外加超短基線(USBL)、GPS、前視避碰聲吶以及深度計(jì)輔助,導(dǎo)航精度可達(dá)到航程的0.1%DT(CEP50),能保證AUV在水下長時(shí)間按照規(guī)劃的測線作業(yè)。
為解決慣性導(dǎo)航誤差隨時(shí)間漂移的問題,采用超短基線定位系統(tǒng)實(shí)時(shí)更新潛航器初始位置,并將位置提供給慣性導(dǎo)航系統(tǒng)。AUV在深水作業(yè)下潛過程中,由于DVL未能跟蹤到海底,潛航器只能依靠USBL提供的數(shù)據(jù)作為慣性導(dǎo)航系統(tǒng)計(jì)算的初始位置,從而消除時(shí)間上的誤差。而AUV在水下測線作業(yè)過程中,DVL能夠?qū)T性導(dǎo)航系統(tǒng)計(jì)算的速度進(jìn)行修正,同時(shí)接收USBL提供的位置數(shù)據(jù)更新,進(jìn)一步提高了AUV水下導(dǎo)航精度。但是如何保證USBL本身數(shù)據(jù)的精度是目前水下作業(yè)值得探討的一大熱點(diǎn)。
2.2 通 信
AUV通信系統(tǒng)不只是水下通信,而且是水聲通信、無線電通信、衛(wèi)星通信、光纖通信和以太網(wǎng)通信等的結(jié)合,主要用于潛航器與潛航器或者其他平臺(tái)的通信,實(shí)現(xiàn)信息的雙向傳輸。
作為關(guān)鍵技術(shù)之一,水聲通信成為目前AUV深海水下作業(yè)唯一可以與工作母船進(jìn)行通信的方式。水聲通信傳輸速率低,通信距離可達(dá)幾百米至幾十公里,但是通信可靠性受到溫度、鹽度以及環(huán)境噪聲影響大,而且無法跨越水與空氣界面?zhèn)鞑ァD壳八曂ㄐ偶夹g(shù)主要朝著水聲信道編碼技術(shù)、水聲擴(kuò)頻技術(shù)等方向發(fā)展,不斷研究如何改善水聲通信的質(zhì)量。
2.3 監(jiān)測控制
AUV監(jiān)測控制系統(tǒng)包括甲板控制端和潛航器控制中心,該項(xiàng)技術(shù)包括潛航器任務(wù)測線規(guī)劃,水面操縱,水下作業(yè)過程實(shí)時(shí)監(jiān)測,作業(yè)后數(shù)據(jù)的下載分析,潛航器自主狀態(tài)檢查、自主避開障礙物以及自主航行,根據(jù)AUV水下作業(yè)狀況,自主完成故障以及應(yīng)急處理。
2.4 測 量
綜合利用水下相機(jī)、黑匣子定位儀、多波束和側(cè)掃聲吶進(jìn)行水下探測,保證深海水下遇險(xiǎn)目標(biāo)物搜尋的高效性和準(zhǔn)確性。未來隨著AUV模塊化技術(shù)的發(fā)展,可以根據(jù)現(xiàn)場任務(wù)需要,選擇搭載不同的測量傳感器。
其中,AUV搭載的EdgeTech2205型號(hào)雙頻同步側(cè)掃聲吶,頻率為230 kHz和850 kHz,跨徑分辨率低頻時(shí)優(yōu)于5cm; SeaBat T50-S型雙頻多波束,頻率為200 kHz和400 kHz,有512個(gè)波束,覆蓋寬度150°,分辨率為6mm; Benthos chirpⅢ淺剖儀頻帶范圍1.5~8 kHz,垂向分辨率大于15 cm;黑匣子定位儀以37.5 kHz為中心,覆蓋5 kHz頻段,可接收35~40 kHz范圍內(nèi)的信號(hào);水下相機(jī)由一個(gè)位于潛航器中部的攝像頭和位于首尾的兩個(gè)LED閃光燈組成,水下閃光燈可提供高達(dá)15萬流明的輸出。
2.5 數(shù)據(jù)分析處理
通過水面控制中心集成軟件Controlcenter來實(shí)現(xiàn)對(duì)AUV水下采集的數(shù)據(jù)、圖像以及系統(tǒng)本身的記錄文件進(jìn)行下載和分析。側(cè)掃聲吶、多波束和淺地層剖面所采集的圖像數(shù)據(jù)在Controlcenter軟件中分別以jsf、 s7k、 sgy格式記錄,可通過Caris、 SonarWiz等后處理軟件進(jìn)行圖像展示和精細(xì)化處理。
3 海上試驗(yàn)
海上試驗(yàn)分淺水和深水兩階段進(jìn)行。考慮到海洋環(huán)境的復(fù)雜性,試驗(yàn)?zāi)繕?biāo)物的投放不可控,淺水試驗(yàn)區(qū)域水深為170 m左右,主要完成對(duì)導(dǎo)航精度及AUV所搭載的多波束、側(cè)掃聲吶、水下相機(jī)、黑匣子定位等探測傳感器的目標(biāo)辨識(shí)能力測試。考慮到南海海域水深限制,深水試驗(yàn)區(qū)域水深為3 500 m左右,主要對(duì)深水條件下潛航器操縱性能、系統(tǒng)運(yùn)行可靠性與穩(wěn)定性以及導(dǎo)航性能等進(jìn)行檢測。
3.1 試驗(yàn)方法
3.1.1 導(dǎo)航精度測試
在水深為170 m的試驗(yàn)區(qū)域,為確保整個(gè)組合導(dǎo)航精度測試過程DVL可有效地跟蹤,潛航器導(dǎo)航系統(tǒng)經(jīng)衛(wèi)星定位裝置有源校準(zhǔn)后,記錄初始位置。設(shè)置一條長約5 km的測線,設(shè)置潛航器以3 kn的速度定高50 m沿測線直線航行。航行到達(dá)預(yù)定目標(biāo)點(diǎn)后上浮至水面,記錄浮出水面位置的慣性導(dǎo)航單元數(shù)據(jù)與同時(shí)刻的差分GPS定位數(shù)據(jù),分別計(jì)算慣導(dǎo)獲取的航行距離與GPS獲得的航行距離,計(jì)算導(dǎo)航精度。
3.1.2 目標(biāo)物識(shí)別能力測試
(1) 目標(biāo)物布放。
首先通過單波束測深儀或?qū)φ账馁Y料對(duì)試驗(yàn)海域進(jìn)行深度及海底地形確認(rèn),并在選定的區(qū)域內(nèi)投放目標(biāo)物,記錄目標(biāo)物落水時(shí)的位置,作為后續(xù)測試過程中潛航器路徑規(guī)劃的位置參考。試驗(yàn)中主要采取兩種目標(biāo)物對(duì)潛航器發(fā)現(xiàn)目標(biāo)的能力進(jìn)行檢測,一種是邊長為100 cm的水泥立方體,另一種是能夠持續(xù)發(fā)射黑匣子信號(hào)的發(fā)射器。
在試驗(yàn)中,為了增加目標(biāo)的辨識(shí)性,將水泥目標(biāo)物與廢棄輪胎捆綁在一塊,同時(shí)用長度2 m的纜繩將黑匣子信號(hào)發(fā)射器與水泥塊連接,如圖2所示,水泥塊將發(fā)射器帶入海底,同時(shí)為了增加水下相機(jī)的辨識(shí)度,在水泥塊各個(gè)面涂上標(biāo)志油漆帶。

圖2 試驗(yàn)?zāi)繕?biāo)物
(2) 測線規(guī)劃與數(shù)據(jù)采集。
試驗(yàn)任務(wù)共分兩個(gè)航次開展,第一個(gè)航次以記錄的布放點(diǎn)為中心規(guī)劃測線,利用側(cè)掃聲吶和多波束初步確認(rèn)目標(biāo)物在海底的可疑位置。
在初步確認(rèn)目標(biāo)物可疑位置后,開展第二個(gè)航次任務(wù),以目標(biāo)物可疑位置為中心規(guī)劃精細(xì)測線,綜合利用側(cè)掃聲吶、多波束測深儀、黑匣子定位儀和水下相機(jī)在潛航器離底30 m、 10 m、 7.5 m、 5 m等不同高度對(duì)可疑目標(biāo)物進(jìn)行探測和搜索,并對(duì)采集數(shù)據(jù)進(jìn)行分析處理,檢測側(cè)掃聲吶、多波束、水下相機(jī)對(duì)目標(biāo)物的探測能力以及黑匣子定位儀不同方位的接收信號(hào)能力。
3.1.3 深水測試
試驗(yàn)任務(wù)共一個(gè)航次,依照潛航器不同的定高來規(guī)劃測線和測量傳感器的設(shè)置,每條測線長1 km,通過觀測潛航器水下航行情況及出水后數(shù)據(jù)情況,檢測深水條件下潛航器的耐壓、操縱性能、系統(tǒng)運(yùn)行可靠性與穩(wěn)定性以及導(dǎo)航性能。測試任務(wù)規(guī)劃如圖3所示。

圖3 深水試驗(yàn)任務(wù)規(guī)劃
3.2 試驗(yàn)結(jié)果
經(jīng)數(shù)據(jù)處理分析,水下相機(jī)、側(cè)掃聲吶、多波束、黑匣子定位儀等采集的數(shù)據(jù)及圖像均能從不同方位和不同水深檢測到所投放的目標(biāo)物。其中側(cè)掃聲吶和多波束測深儀均能很好地呈現(xiàn)被測海底地形地貌圖像,黑匣子定位儀能從不同方位接收到投放的黑匣子信號(hào)。不同探測傳感器搜尋識(shí)別目標(biāo)物效果如圖4所示。
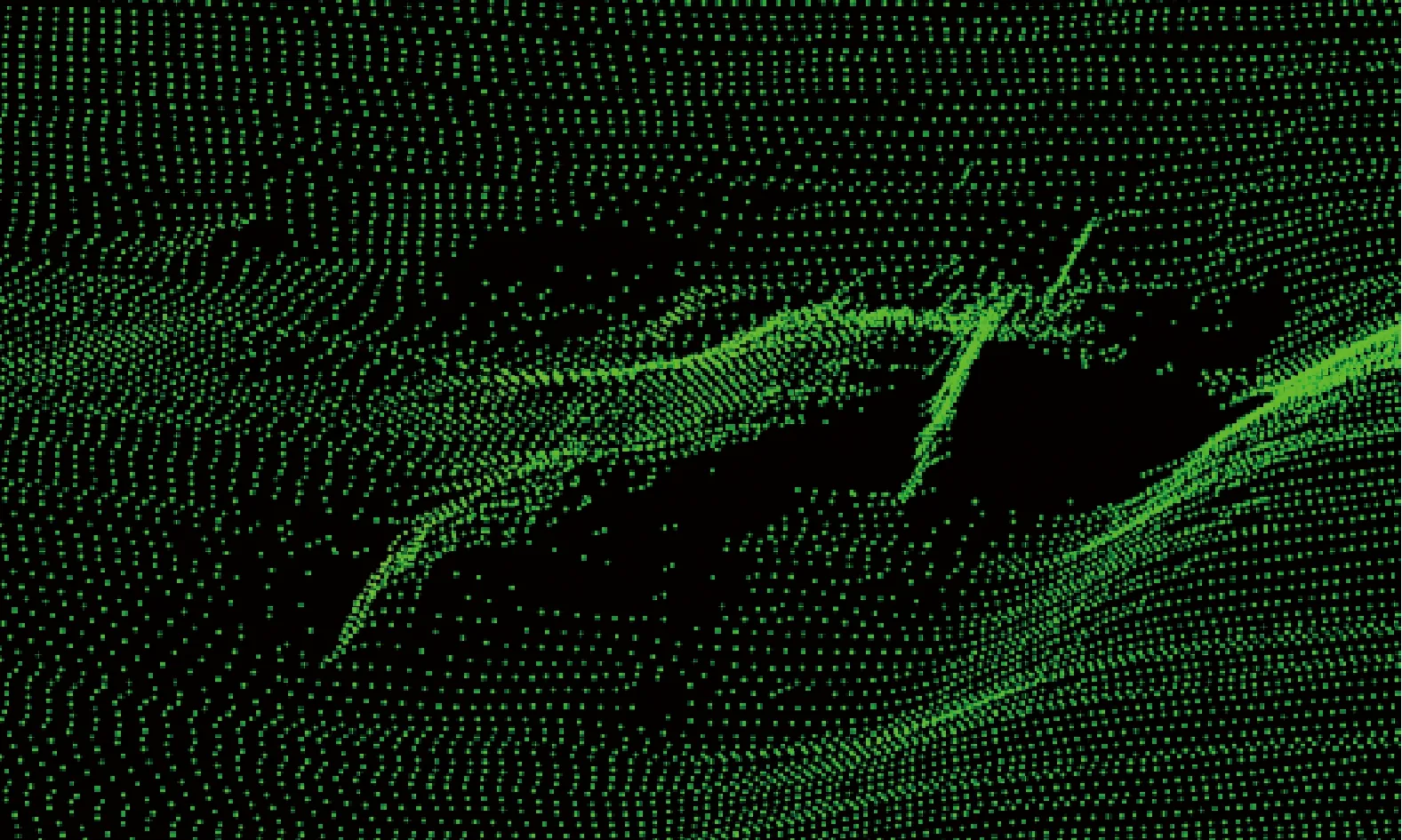
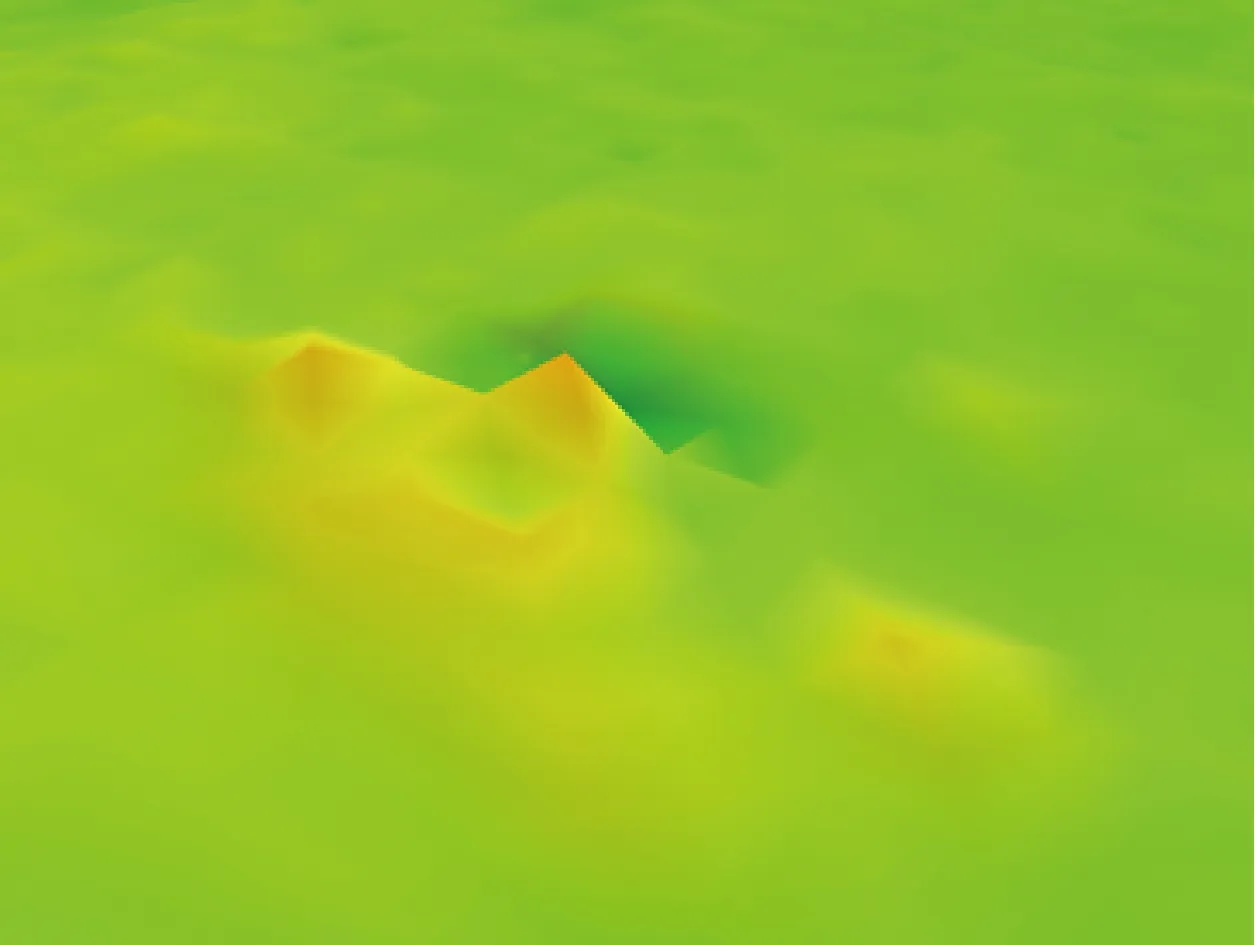
圖4 400 kHz多波束測深儀探測目標(biāo)效果

850 kHz側(cè)掃聲吶掃測目標(biāo)效果

水下相機(jī)搜尋目標(biāo)物效果
根據(jù)試驗(yàn)結(jié)果,AUV各主要技術(shù)指標(biāo)如表1所示。

表1 試驗(yàn)測得AUV主要技術(shù)指標(biāo)
潛航器在作業(yè)過程中姿態(tài)穩(wěn)定,動(dòng)力系統(tǒng)工作狀態(tài)正常。潛航器航行期間通信良好,且在水下能依照預(yù)設(shè)路徑很好地完成自主航行。在作業(yè)過程中,某一時(shí)段潛航器姿態(tài)數(shù)據(jù)如圖5所示。

圖5 潛航器3 400 m水下作業(yè)姿態(tài)
4 結(jié) 語
本文結(jié)合工程試驗(yàn)應(yīng)用,介紹了深海水下遇險(xiǎn)目標(biāo)物搜尋方法及流程,驗(yàn)證了深海搜尋6 000 m無人潛航器實(shí)際作業(yè)穩(wěn)定性以及水下搜尋探測技術(shù)的準(zhǔn)確性。試驗(yàn)結(jié)果表明,綜合利用水下相機(jī)、黑匣子定位儀、多波束水深數(shù)據(jù)和側(cè)掃聲吶聲圖進(jìn)行遇險(xiǎn)目標(biāo)物識(shí)別,保證深海水下遇險(xiǎn)目標(biāo)物搜尋的高效性和準(zhǔn)確性,大大提高了水下搜尋效率,對(duì)其他類型深海AUV的設(shè)計(jì)和應(yīng)用具有一定的指導(dǎo)意義。但是在使用過程中,AUV在布放回收方式和水下通信質(zhì)量方面仍然需要改善和提高,可以考慮AUV水下回收來降低水面回收的風(fēng)險(xiǎn),通過降低工作母船的噪聲來改善水聲通信環(huán)境。
總之,通過AUV在深海水下目標(biāo)物搜尋的應(yīng)用,使得目前的搜救技術(shù)日趨完善,搜救手段更加先進(jìn),搜救勞動(dòng)強(qiáng)度大幅降低,工作效率顯著提高,實(shí)現(xiàn)了深遠(yuǎn)海水下搜救的自動(dòng)化,而且能滿足不同的工程需要,未來隨著AUV技術(shù)的成熟,人們對(duì)新技術(shù)新設(shè)備不斷地認(rèn)識(shí)和接受,AUV在深海水下搜尋救助上會(huì)擁有巨大的優(yōu)勢,會(huì)發(fā)揮更大的作用。
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
