可穿戴下肢外骨骼總體方案設計
2020-03-05 02:33:50
技術與市場 2020年2期
關鍵詞:設計
(東北林業大學,黑龍江 哈爾濱 150080)
0 引言
可穿戴外骨骼機器人,又名助力機械,是一款能夠為使用者加強承載負荷能力,提供輔助動力,以及幫助其支撐地面的助力機器人,屬于可穿戴智能設備[1]。
可穿戴外骨骼機器人作為熱門研究領域,在近些年發展迅速,已經具備了針對不同工作領域的不同類型外骨骼。如今外骨骼機器人的應用領域主要是:軍事、醫療以及民用[2-3]。
下肢外骨骼總共有3個關節組件:髖關節、膝關節和踝關節。每個關節的運動和受力情況都能對人體產生影響。本文將針對人體下肢,進行外骨骼的整體方案設計。
1 人體步態分析
我們通常把一個健康的成年人感覺最舒適、自如的行走姿態叫做人體步態。他是成年人體最基本的運動狀態。人體下肢一側的腳跟接觸地面到同側腳跟下一次接觸地面之間的運動時間叫做一個步態周期[4-5]。步態運動的各個時期如圖1所示:我們把一側腳跟接觸地面到腳尖離開地面的過程叫做支撐相,約占整個周期的3/5;把一側腳尖離開地面到同側腳跟接觸地面的過程叫做擺動項,約占整個周期的2/5[6]。

圖1 人體步態
2 人體下肢各關節生物力學模型及其運動學分析
2.1 人體下肢生物力學模型分析
通常在進行人體各關節運動研究時,要對人體基本參考系進行研究。在醫學研究和體育學中常用的參考系如圖2所示。整個參考系由失狀軸、冠狀軸、垂直軸3個軸組成,同時具有冠狀面、矢狀面和橫斷面3個平面。人體各個關節的運動形式,可以大致分為屈伸運動、收展運動和旋轉運動3種[7]。
如圖3所示,參與人體下肢運動的關節有很多,而且大多數是多自由度關節。設計時下肢有些部位也存在一些少動或不動關節,這些關節只具備少量的調節功能,所以在外骨骼簡化設計中只考慮髖關節、膝關節和踝關節。
2.2 人體下肢運動學分析
人體下肢具有不同的運動形式,大多以串并聯的混合旋轉結構為主,在機構學中可以表現出不同的運動形式[8]。在設計外骨骼機構時,要詳細考慮人體下肢的機構運動學,使外骨骼結構也具備人體下肢復雜和精密的機構特點(見圖4)。
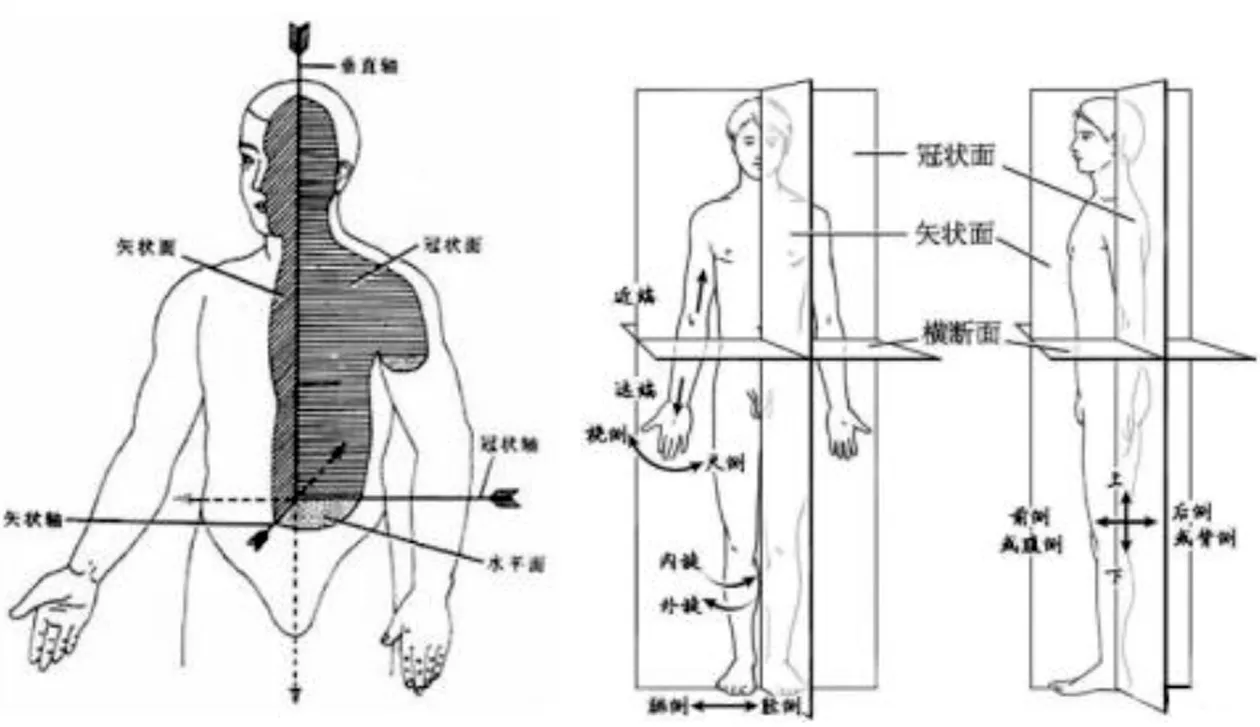
圖2 人體基本平面及軸線

圖3 人體重要骨骼及關節

圖4 人體下肢關節分布情況
通過對人體下肢骨骼機構的分析,可以將髖關節和踝關節均看作具有3個自由度的球副機構,將膝關節看作只有1個自由度的轉動副機構[9]。下肢骨骼與腰部盆骨相連,組成雙下肢的運動鏈,簡化后的下肢骨骼構型如圖5所示。

圖5 下肢骨骼簡化模型D-H坐系
通過人機工程的相關資料數據分析,可以得到我國正常青年男子的身高與骨骼的大致比例。根據比例,可以得到人體各關節中心的相對尺寸,從而確定外骨骼各連桿和副之間的尺寸參數(見圖6),其中:l0=0.039 H;l1=0.246 H;l2=0.245 H;l3=0.191 H。

圖6 骨骼長度與身高比例關系
人體在正常步態運動中兩側下肢為相對中心對稱關系,所以在分析時可以只考慮單側下肢。本小節以右側下肢為例,進行運動軌跡方程求解。[10]式中l3,l4均為常值,θ1,θ2,θ3為旋轉角度,隨著時間t變化而變化,c代表cos,s均代表sin,α、β、γ分別代表對應X、Y、Z軸的旋轉角度。

設盆骨中心O4的運動軌跡方程為:

(1)

(2)
根據式(2)可以得到:
所以大腿連桿相對髖關節中心的軌跡方程為:
f1(t)=y1(t)=-l0·y(t)
(3)
小腿連桿相對膝關節中心的軌跡方程為:
(4)
當已知速度方程時,可以通過下肢連桿末端的速度X和下肢各連桿的初始位置求得運動學逆解,得到關節轉動曲線。設:
(5)

3 外骨骼踝關節驅動系統結構設計
3.1 外骨骼結構設計要求
外骨骼機器人是一種典型的人機結合設備,需要具備良好的舒適性和穩定性,保證人機協作效率良好。具體設計要求如下。
3.1.1 外骨骼擬人設計要求
外骨骼各關節的擬人設計是外骨骼各關節機構穿戴舒適且與人體運動功能相一致的前提,根據人體各關節位置進行盡量精確排布關節自由度位置,設計合理的運動副替代結構;針對人體下肢特點,設計合理的約束機構,其穿戴部分尺寸可調。
3.1.2 外骨骼人機運動適應性要求
人體運動過程中,設備與人體的相對位置可能會產生偏移,因此需要設計一些機構以適應人體運動過程中產生的人機相對位置變化,設備穿戴后無論何種綁縛狀態,勢必要留有一定空間給人體進行自調整,運動過程中這樣的空間會造成人機一定程度的偏離,保證適應性的關鍵是為設備和人體設計合理的空間位置,選擇適應性較強的人機連接方式,或者設計一個調整機構或在結構本體或在驅動系統中,以適應足部屈伸帶動小腿肌肉的變化,實現外骨骼各關節部件的位置自調整。
3.1.3 外骨骼機體運動范圍要求
外骨骼機構設計時,應滿足機體運動范圍大于正常的人體運動范圍,保證在規定范圍運動時能夠達到人體需要而機器不產生干涉,不與其他部件產生碰撞;再在各關節處增加限位部件,起到保護作用。
3.2 外骨骼關節布置方案
已知影響人體下肢步態運動的自由度共有7個,但是踝關節處的收展自由度在人體正常運動中運動角度很小,可以忽略不計,所以在外骨骼設計時不進行考慮,外骨骼每側下肢只設計6個自由度。這6個自由度中,髖關節具有屈伸、旋轉、收展3個自由度;膝關節具有屈伸運動1個自由度;踝關節具有旋轉和屈伸2個自由度。
通過已知的自由度限制,設計2種可行性較高的關節布置方案,如圖7所示。

(a)外骨骼關節布置方案一 (b)外骨骼關節布置方案二
在人機穿戴運動時,外骨骼的關節相對人體外置,與人體各個關節的運動軸線不重合,運動中外骨骼與人體下肢實際運動軌跡偏差會很大。為了解決這個問題,需要在外骨骼關節位置布局上進行設計,在保證與人體運動一致的情況下,滿足人體所需的舒適度。
設計時,由于3個關節的屈伸自由度運動軸線可以輕易滿足與人體運動軸線重合,所以設計重點往往在髖關節的收展和旋轉自由度,還有踝關節的旋轉自由度上。如圖7所示,2種方案在腰部與大腿的連接處均設置了3個旋轉軸線相互垂直的旋轉副,可以滿足髖關節進行正常的大腿內擺外擺運動、大腿屈伸運動和大腿內旋外旋運動;在大腿與小腿的連接處設置了一個水平方向的旋轉副,可以滿足膝關節水平方向的屈伸運動;在小腿與腳部連接處設置了2個旋轉軸線垂直的旋轉副,可以滿足踝關節的內旋外旋和屈伸運動。2種設計方案最大的區別就是髖關節處收展和屈伸2個自由度的位置變化。方案一中髖關節的收展運動軸線在腰部的后邊,可以在人機穿戴時滿足與人體髖關節收展運動軸線重合,而方案二中髖關節收展自由度處于大腿與腰部中間,很難與人體髖部收展運動軸線重合,理論誤差遠遠大于方案一。
已知正常人體骨骼之間長度比例大致相同,如果一個人身高為H,那么他的大腿長度即髖關節到膝關節的長度為0.245 H;小腿長度即膝關節到踝關節的長度為0.246 H;踝關節相對地面的長度約為0.039 H。據統計男性身高平均值為175.24 cm,在骨骼結構要設計6 cm的伸長縮短結構,保證這一可調節的范圍。采用內桿外桿相對運動的方式實現。
4 結語
本章通過對人體步態進行分析,首先將步態按人體下肢的運動劃分成6個狀態,然后經過分析論述人體下肢的生物力學模型,并對該模型按構件簡化進行運動學分析。最后根據下肢各關節的生物力學模型和運動規律,提出外骨骼的設計要求,對外骨骼的整體方案進行設計。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
