地面無人移動平臺機械臂遙操作控制技術研究
2020-03-04 22:55:47楊天夫
科學與財富 2020年36期
關鍵詞:機械


摘 要:地面無人平臺在近些年發展迅速,在戰場、災害救援等多種場合都有所應用。本文針對地面無人平臺機械臂的遙操作控制方式做出調研,針對不同的控制方案做出對比論證。得出了以末端控制和關節映射專用控制器結合的復合控制方式,在兼顧效率的同時又提高了裝備的可攜帶性和易操作性。
關鍵詞:地面無人平臺;機械臂;遙操作
1. 引言
我國在“七五”計劃中把機器人列人國家重點科研規劃內容,陸續展開了機器人基礎理論與基礎元器件研究[1]。幾十年來,相繼研制出各門類的工業機器人及水下作業、軍用和特種機器人。無人移動平臺屬于機器人產品中的特種機器人,而機械臂則多數應用在工業機器人中。隨著改革開放以來經濟發展的持續增長,無人移動平臺在軍民各領域的需求不斷增多,其自主性、自適應性和多功能性都提出了更高的要求。搭載機械臂的無人移動平臺或稱為移動操作系統的出現滿足了危險環境作業、戰場應用、極地和外太空探索等領域的應用需求,近年來越來越多的研究工作在該領域展開。
地面無人移動平臺,是指在地面上行駛,且不需要人工車上駕駛的車輛等地面移動系統。地面無人移動平臺在高危環境、狹小空間等工作環境下相比人工作業有著得天獨厚的優勢。因此,地面無人移動平臺在戰爭、災害救援、危險作業、醫療服務等各個領域都已經展開了廣泛的應用[2]。如今,已經有大量的遙控無人移動平臺用來代替人力工作在危險環境下。
在機器人系統中,操作臂或機械臂是一種輔助機器人本體抓取、放置、加工材料或物品的裝置,通常采用類似人類手臂的機械結構并包含相應的轉動或滑動關節,具有多個自由度的機械裝置[3]。
搭載機械臂的無人移動平臺或移動操作臂系統是移動無人平臺和機械臂系統的有機整合,機械臂是工業領域的常見生產工具,研究內容涉及機械結構設計、機械臂正逆運動學理論、剛柔耦合動力學理論、計算機仿真和控制策略等方面。從實際應用角度看,機械臂使無人平臺在單純偵察、檢測的基礎補充了處置問題的能力;反之,無人平臺的引入是機械臂系統的靈活性大大增強,從生產線上固定的單一作業工具的角色轉變為可以替代人類完成工作的智能機器人。其應用前景十分廣闊,預計帶來的經濟效益豐厚。
傳統工業機械臂的應用方式大部分為預先通過示教器編程,按照預定生產目標重復、快速的完成單一工作,對于機械臂本身的運行速度和重復定位精度要求較高。而移動無人平臺的機械臂則大多數情況下應用于非結構環境,每次執行的任務都有所變化,絕大多數情況下需要遙操作完成。
本文根據5自由度移動平臺機械臂特點,提出了一種復合式控制終端,通過單關節、逆運動學和關節映射控制器三種控制方式完成移動平臺機械臂的方案,兼顧了不同操作條件下的機械臂控制特點,提高了機械臂的控制效率,達到了良好的控制效果。
2. 機械臂控制原理
對于移動平臺機械臂而言,操作臂的控制需要以遙操作的方式完成,即機械臂實時的接收遠程控制端的操作員指令,實時的根據操作員的意志完成作業過程。一般而言,遙操作控制可以通過單關節逐個控制、末端速度逆解和專用關節映射控制器等幾種方式完成。
單關節控制的原理比較簡單,即通過遠程控制終端的按鍵或觸摸屏等方式采集操作員的控制指令,包括每個關節的轉動速度和角位移值,通過鏈路通信設備傳遞給機器人,機器人將指令轉化為對應關節的實時轉動。從控制原理上講,關節之間不存在耦合,機器人端只需要采用傳統PID控制方式按照預設定的增益值輸出對應的關節扭矩通過速度和位置閉環即可完成作業。
關節逆運動學的控制實現原理相對復雜一些。操控端采集到的是機器人末端操作器在笛卡爾空間內的移動和轉動速度,需要經過解算變換為關節空間內的轉動速度傳遞給機械臂。機械臂的Jacobian矩陣表示機械臂的操作空間與關節空間之間速度的線性映射關系,對于6個關節機械臂Jacobian矩陣是方陣,如果它是可逆的,則可以由機械臂的末端速度求出各個關節的速度。但Jacobian矩陣在機械臂的奇異位姿上是不可逆的。在實際應用中,當機械臂的末端位置接近奇異位置時,Jacobian矩陣是病態的,可能導致關節速度不能正確地得到對于逆速度解問題,速度逆解公式為? ? ? ? ? ? ? ? ? ? ?,注意到此時需要求雅可比矩陣的逆,由線性方程組理論知上式對任意的? ? ? ? ? 都有解的必要條件是雅可比矩陣的秩rank(J)=6,這意味著機械臂的自由度數n≥6。但從移動平臺的承載重量,降低成本等方面考慮,移動平臺機械臂通常采用欠驅動模式,采用5自由度或4自由度機械臂,雅克比矩陣為長方陣,給求逆運算帶來問題。另外,當機械臂處于完全展開或兩個以上的關節處于共軸狀態時,也就是產生所謂萬向節鎖問題時機械臂將處于奇異位姿,造成雅克比矩陣不滿秩,無法求逆。
實際上,最小二乘解是高維空間向低維空間的投影,因此在通過逆解出來的關節速度控制機械臂時,其控制結果會產生一定誤差,這是機械臂本身結構性質所決定的。
另外一種處理方式是放棄某幾個維度上的控制,抽取雅克比矩陣的特定行,把欠驅動問題變成過驅動問題,這樣處理帶來的結果是某些維度上的結果不可控,一般來說可以忽略末端的姿態控制而只控制其位置,達到目標點附近后再通過軸控制逐漸調整目標姿態。可將肩部和肘部俯仰關節抽取出來形成一個平面兩自由度連桿,控制在豎直平面內的上下和前后運動,而左右移動則由肩關節的左右轉動來代替,腕關節的俯仰和連續轉動則單獨控制。這樣一來,既可以在操控端形成良好的視覺控制反饋,符合操作手的直觀控制邏輯,又保證了機械臂控制的精確性,符合遙操作的設計目的。
3. 控制方案
操作控制單元,即機器人的遙控設備,是連接人類和機器人的橋梁,負責將人的指令轉化為電信號傳送給機器人,并要將機器人自身和采集到的狀態信息反饋給人類操作手,以便于了解機器人狀態并做出下一步指示。操作手利用控制單元控制機器人的移動、搭載的載荷的動作以及監測機器人本身和外部環境的實時信息,因此,控制單元需要適應人的使用習慣,信息反饋要直觀,命令的下達要符合簡單直接的操作邏輯。可以說,控制單元是人類操作手與整個機器人系統交互的直接媒介,其易用性、響應速度、穩定性、可擴展性等對機器人的綜合表現起到至關重要的作用。
針對搭載機械臂的無人移動平臺而言,除了需要滿足移動底盤前進后退等運動控制外,任務載荷的控制則更為復雜。在多軸機械臂上,一個操作手則要控制多個自由度的機械臂運作,完成抓取、引爆、釋放、轉動等各種復雜操作。因此,更需要專用的操作手段輔助操作手順利完成作業。
3.1. 方案對比
相較底盤,機械臂的自由度更多,控制更為復雜。一般來講,對機械臂的控制主要有單軸控制、末端逆運動學控制、關節映射控制等。
單軸控制器的實現比較簡單,如圖所示,即將機械臂每個自由度設置一個控制搖桿或按鈕,控制器正反轉,類似于傳統工程機械的控制方式。該方式的好處是實現起來簡單,壞處也是顯而易見的,末端的位置不易通過單軸控制直接得到,且控制效率十分低下。
另一類常用的控制方式為末端逆運動學控制,該方法可以直接對機械臂末端位置進行控制,操作者通過控制器發送末端的空間6自由度指令,控制器通過逆運動學算法將其轉化為各軸的轉角和速度并發送給機械臂。這種控制方式的好處是對于操作者更為直觀快速,另外可結合VR設備、力反饋設備等實現更為復雜的控制功能,缺點是軟件開發難度較大,研發成本高。
最后一種是關節映射控制方法,實際上就是在操控端使用一個跟機械臂等比縮小的控制器,操作者,直接操控該機械臂的末端,遠端的機器人則完全復現操控端的動作。這個方案的優點是軟件開發難度較小,對操控者也很友好,缺點是需要制造專用控制設備,且需要解決諸如關節阻尼、信號采集濾波等問題,硬件上實現起來的難度相對較大,一定程度上增加了成本。
相較于主控制器,機械臂的控制更為復雜,一般來說為了避免機械臂鄰近奇異點或有其他故障發生時失控,單軸控制的功能是必須具備的。但有別于國內有些廠家簡單粗暴的多個按鈕設置,這部分功能可以結合主控制器的觸摸屏或撥碼開關完成,大部分時候不需要啟用,只在特殊情況下在分級菜單中調出。
而末端控制則是機械臂控制的重點。逆運動學解算的方式,則軟件開發階難度較大,并且后續調試也耗時很長,且對于欠驅動機械臂奇異位置無法求解,控制效果無法做到十分精確,且容易與周圍環境產生碰撞。關節映射是更為優秀的控制方案,但這就制造一個專用控制設備與主控制器連接,在需要用到時裝載在主控制器上,不需要時可以不隨身攜帶,而只使用主控制器上的逆運動學控制方式。因此,這里考慮兩種控制方式并舉,針對不同應用環境采取不同的控制措施。
3.2. 方案設計
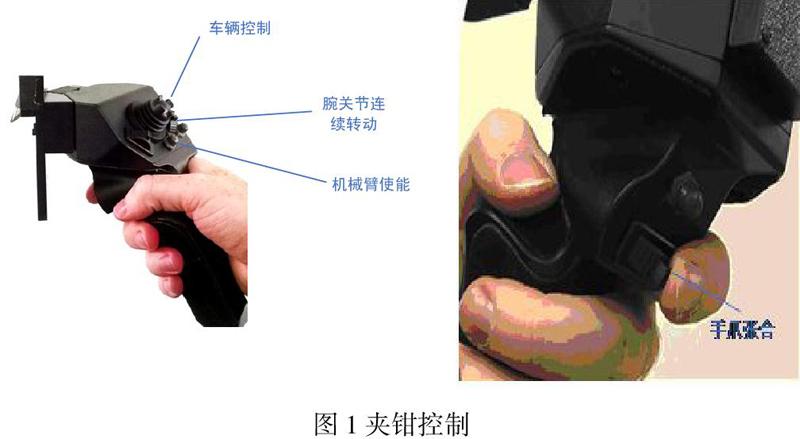
機械臂專用控制的設計方案主要參考圖中的單臂部分。臂桿和關節位置設計完全按照真實機械臂參數縮比得到,總長度參考人手臂長度定制。手柄處分別設計搖桿、滾輪、扳機按鍵和按鈕功能,通過軟件映射到機械臂的旋轉、抓取以及底盤的運動等。關節處安裝絕對位置編碼器,測量關節轉角,機械結構上要設計一定機械阻尼,合適的阻尼可以使控制器既不輕易失控,又不給操作者帶來太大負擔。
手持主界面主要組成部分為一塊觸摸屏,兩側分別布置搖桿、實體按鍵和推桿等,手持設備左右肩部分別設置有扳機按鍵。機器人的所有控制功能都可以通過觸屏完成。在駕駛狀態下,主視圖顯示攝像頭圖像,此處可同時添加多路攝像頭,但要保證行駛方向上的攝像頭做主要顯示,其他攝像頭以小窗輔助的行駛顯示在主視圖內。
機械臂的單軸操作和末端運動學操作都可以在觸屏中完成。首先,在機械臂的所有控制界面下,都可以完成底盤的原地自轉和手爪的張合控制,通過底部的兩個虛擬滑塊來實現,同時這兩個功能分別映射到左右兩個實體推桿,方便操作。機械臂的模型投影到主界面中,拖動相應臂桿即完成相應控制,簡單直接。這部分功能不建議映射到實體按鍵和搖桿上,因為要控制的軸較多,容易給操作者帶來困惑。單軸到末端控制切換功能設置在右下角控制區域。
對于末端控制而言,由于采用的是五軸機械臂,因而在較多的位置存在奇異解,在六自由度空間內雅可比矩陣直能求得偽逆,得到近似解。因此考慮采用柱坐標控制方式,將機械臂控制分布到二維空間內,即在臂桿平面投影方向上采用平面內兩個平移自由度的雅可比逆控制肩肘兩個個俯仰關節,再單獨控制手抓腕關節的俯仰,最后通過底部偏航關節控制機械臂的左右方向,而不控制機械臂左右方向內的平移。基于這個設想,在末端控制功能下,主界面內的前后左右滑動對應機械臂的上下平移和左右轉動,而前后平移則單獨設置一組虛擬推桿控制,另外,手爪腕關節的俯仰也需要添加一組虛擬搖桿。
專用控制器由五個關節組成,對應于機械臂的五個軸,每個關節裝有一枚絕對值編碼器,控制器末端裝有定制手柄。臂桿連接到一個固定基座,固定方式可通過臺鉗基座等方式固定在地面或操作手腰間。
整個控制器由一個stm32控制板控制,軸上編碼器通過SSI總線傳回到板卡IO口解析為各角度數據,手柄的按鍵和搖桿信息可通過串口傳回到板卡。板卡再通過USB連接到背負計算機,完成整個控制鏈路的連接,采用USB的好處是即可通信又可供電,無需其他連接接口。手柄的功能相對較多,對應圖片一一說明。手柄正面有一個兩軸搖桿,兩個推桿和兩個實體按鍵。分別對應于車輛控制,腕關節回轉和機械臂使能等。手柄背部還有一個扳機搖桿,對應于手爪的張合。這樣一來,操作手可以脫離主控制器,直接使用該控制器控制車輛和機械臂的大部分功能。
4. 結論
本文針對地面無人平臺的機械臂遙操作技術做出研究,針對平臺本身和任務載荷機械臂的有機結合控制方式做出對比論證。針對便攜性、易操作性和控制算法實現的難易程度做出對比,得出采用末端圓柱坐標和關節映射控制器相結合的控制方式,在不同的使用場景下各有側重,很好的解決了地面無人平臺機械臂的遙操作問題。
參考文獻:
[1]金周英,白英. 我國機器人發展的政策研究報告[J]. 機器人技術與應用,2009,02:1-7.
[2]魏丕勇,閆清東,馬越. 無人地面武器機動平臺驅動系統設計與仿真研究[J]. 工程設計學報,2005,03:152-158.
[3]Tianfu Yang, Shaoze Yan, Zengyao Han. Nonlinear model of space manipulator joint considering time-variant stiffness and backlash. Journal of Sound and Vibration, 2015, 341: 246-259.
作者簡介:
楊天夫(1987年7月),男,遼寧鞍山人,博士,工程師,機器人方向.
(航天科工深圳(集團)有限公司 廣東 深圳 518026)
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
