LMS算法自適應均衡器的設計
2020-03-04 05:39:02周超
數字通信世界 2020年2期
周 超
(華南理工大學廣州學院,廣東 510800)
均衡技術是通信領域三大技術之一,時域均衡具有很強的實時性,被廣泛使用。通過軟件或數字芯片,可以實現數字濾波器的設計,而不必依賴電感、電容等模擬元件。本研究通過系統建模、仿真的方式完成了均衡內部參數的設計。在參數選取上克服了隨意性并節省了系統資源,對均衡的開發具有一定的參考意義。
1 均衡模型
LMS算法使用最小均方誤差準則,并采用最速下降梯度算法[3]。LMS算法可以概括為兩個過程:濾波和參數調整。第一步初始化濾波器抽頭系數矢量;然后求解當n=n+1時濾波器的輸出;最后求出誤差值并調整抽頭系數值[3]。具體公式為:
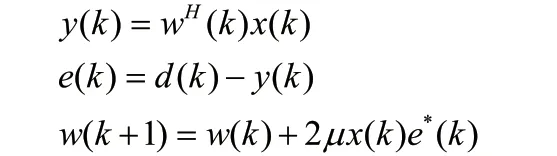
因此,均衡效果的優劣受到信號期望值d(k)、濾波器抽頭更新步長μ、抽頭數量的影響。判決反饋盲均衡器的期望值e(k)由接收信號的判決值替代,因為接收信號本身含有發送信號的信息[3]。
2 LMS判決反饋盲均衡算法仿真
圖1是通信系統使用LMS判決反饋盲均衡與未使用均衡時的效果對比。從圖1的a、b中顯示出使用均衡后,原本混疊的碼元顯著地分開了。圖1中c的誤碼率數據表明,使用均衡后的通信質量明顯提高。

圖1 LMS判決反饋盲均衡使用前后效果對比
為了更清晰地觀察該均衡方案的校正效果,因此在同等條件下將信道誤碼率提高到 進行仿真,其中誤碼率統計部分每一百個碼元顯示一個點,圖2為仿真結果。
據圖2可知,在信道誤碼率是7.4204*10-3時,LMS判決反饋盲均衡器仍然能通過少量碼元就調整好參數,進而適應信道特性,降低系統的誤碼率。因此,在該環境下LMS判決反饋盲均衡是一種有效的方法。
圖3為LMS判決反饋盲均衡器在信道誤碼率分別為7.4204*10-3和3.7201*10-3環境下、抽頭更新步長μ分別為1/32、1/64、1/128時的誤碼曲線。據圖可知,在步長μ取不同值時,系統穩定后的余差相近。因而主要從系統收斂速度、工程實現難易、資源占用大小三個角度進行考慮(相較于除法運算,FPGA更適合移位操作,因此更新步長選取2n值),所以選用1/32作為抽頭系數更新步長值。
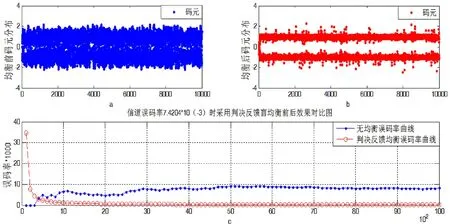
圖2 LMS判決反饋盲均衡前后效果對比
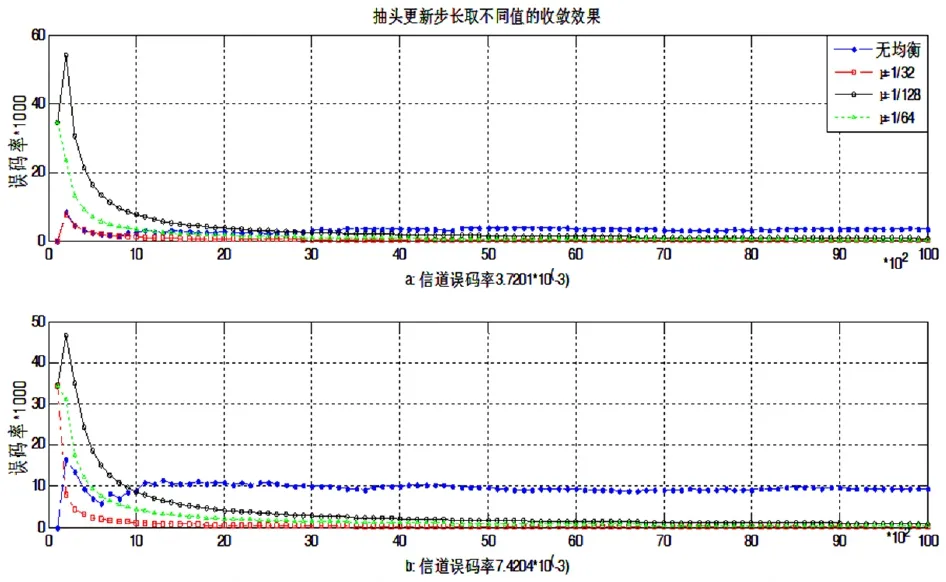
圖3 更新步長仿真結果
若更新步長一定,即使將均衡濾波器長度不斷加長,結果也不會有大的改變。圖4為在更新步長μ取1/32時,抽頭個數分別取5、7、9、11時的誤碼率仿真結果。由圖可知,抽頭個數分別為5、7、9、11的均衡器均能快速收斂,此時從資源占用、收斂后的誤碼率方面考慮,采用5級抽頭的濾波器。
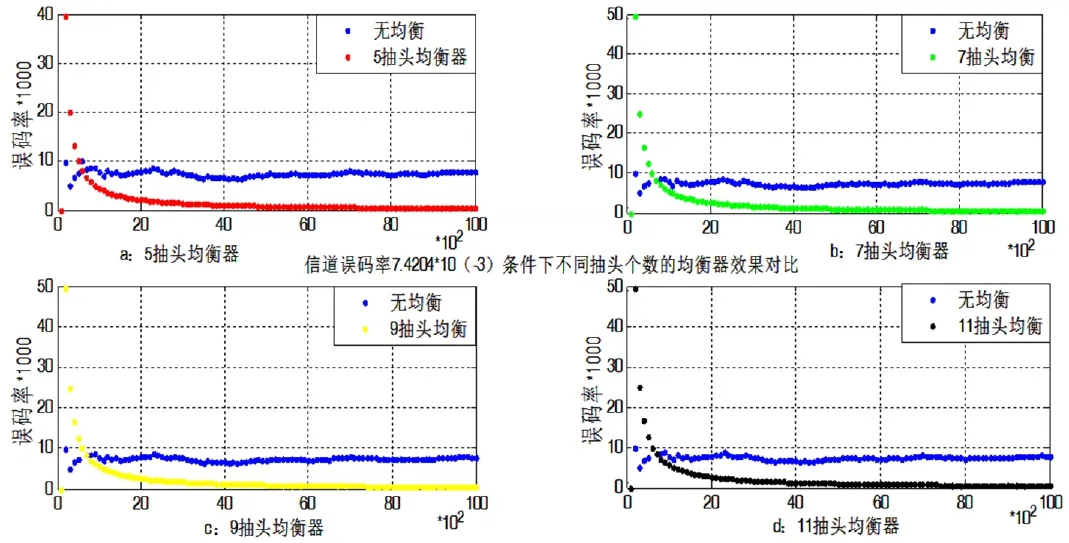
圖4 不同抽頭個數LMS判決反饋均衡仿真結果
通過仿真結果可以得到均衡的設計參數,圖5給出了均衡器的內部組成框圖,信號在4級延時后得到第一個輸出。

圖5 均衡器內部組成框圖
3 結束語
本文首先驗證了LMS算法判決反饋盲均衡在高碼率環境下的均衡效果;進而通過MATLAB仿真確定了均衡器的濾波器級數、抽頭更新步長值等均衡器內部設計參數;采用本文能夠有效的實現基于LMS算法的自適應數字均衡器的設計。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中華詩詞(2018年11期)2018-03-26 06:41:34
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11