基于偽衛(wèi)星的室內(nèi)定位算法研究
2020-03-04 03:40:20于雪崗鄧志鑫
無(wú)線電工程 2020年2期
關(guān)鍵詞:測(cè)量
于雪崗,封 欣,鄧志鑫
(1.中國(guó)電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081;2.中國(guó)人民解放軍32021部隊(duì),北京 100094)
0 引言
室內(nèi)定位[1]是當(dāng)前定位導(dǎo)航領(lǐng)域的一個(gè)重要方向,有著各種各樣的應(yīng)用場(chǎng)景,例如商場(chǎng)內(nèi)商家精確導(dǎo)航、室內(nèi)位置共享等模式。為了實(shí)現(xiàn)室內(nèi)定位,目前開(kāi)發(fā)了多種定位手段,包括藍(lán)牙定位、WLAN定位[2]、視覺(jué)定位、激光定位和慣導(dǎo)定位等多種定位手段,但這幾種定位手段均存在定位精度差的問(wèn)題。對(duì)室外定位來(lái)說(shuō),GNSS系統(tǒng)[3]目前已經(jīng)能夠滿足cm級(jí)定位需求,利用這一系統(tǒng)原理建造相似的室內(nèi)定位系統(tǒng)來(lái)滿足人們的定位需求,開(kāi)展室內(nèi)偽衛(wèi)星系統(tǒng)定位算法研究,開(kāi)展使用偽衛(wèi)星進(jìn)行室內(nèi)定位的理論可能性及工程實(shí)現(xiàn),并在當(dāng)前已有的接收機(jī)基礎(chǔ)上進(jìn)行算法分析及改進(jìn),分析偽衛(wèi)星室內(nèi)定位中存在的問(wèn)題及優(yōu)缺點(diǎn)。
1 室內(nèi)偽衛(wèi)星模型
鑒于室內(nèi)環(huán)境布設(shè)場(chǎng)地有限,偽衛(wèi)星布設(shè)可以采用陣列的形式來(lái)實(shí)現(xiàn),以減小系統(tǒng)設(shè)計(jì)的空間需求,這樣會(huì)產(chǎn)生空間位置精度因子(PDOP)[4]惡化的后果。PDOP只與偽衛(wèi)星布設(shè)和用戶(hù)位置有關(guān),與其他因素?zé)o關(guān)。假設(shè)用戶(hù)坐標(biāo)位置為P=(x,y,z),偽衛(wèi)星坐標(biāo)位置為Pn=(xn,yn,zn),由此可以得出幾何矩陣:
(1)
權(quán)系矩陣H:
(2)
PDOP為:
(3)
在較為空曠的室內(nèi)環(huán)境中,偽衛(wèi)星陣元可以懸掛在室內(nèi)上空,采用八陣元的形式,陣元間隔約為1.3 m,采用七圍一的形式,其結(jié)構(gòu)圖和PDOP分布如圖1所示。
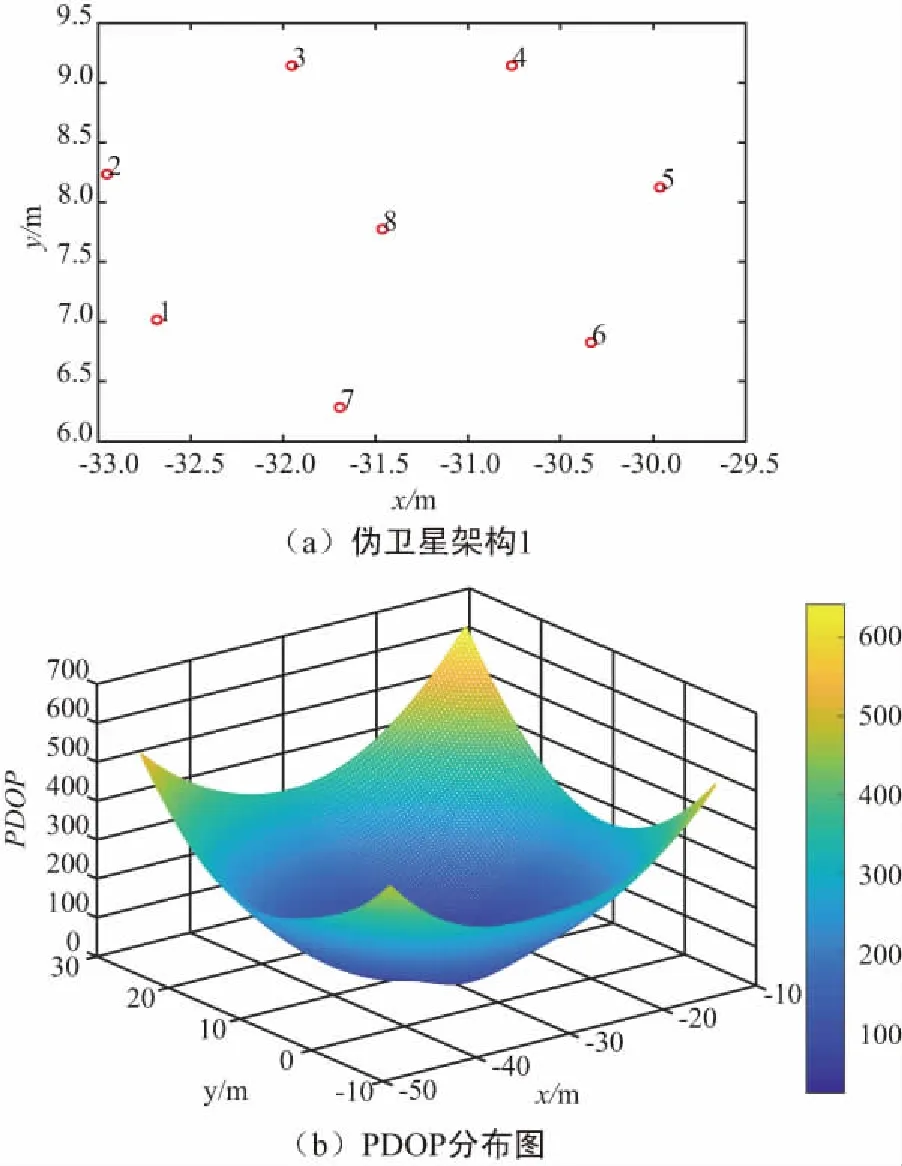
圖1 偽衛(wèi)星架構(gòu)1及PDOP分布示意Fig.1 Pseudo_satellite architecture 1 and PDOP distribution diagram
室內(nèi)環(huán)境如果存在狹長(zhǎng)的走廊時(shí),偽衛(wèi)星陣元只能在走廊一側(cè)傾斜安裝,陣元間隔約為1.1 m,其結(jié)構(gòu)圖和PDOP分布如圖2所示。
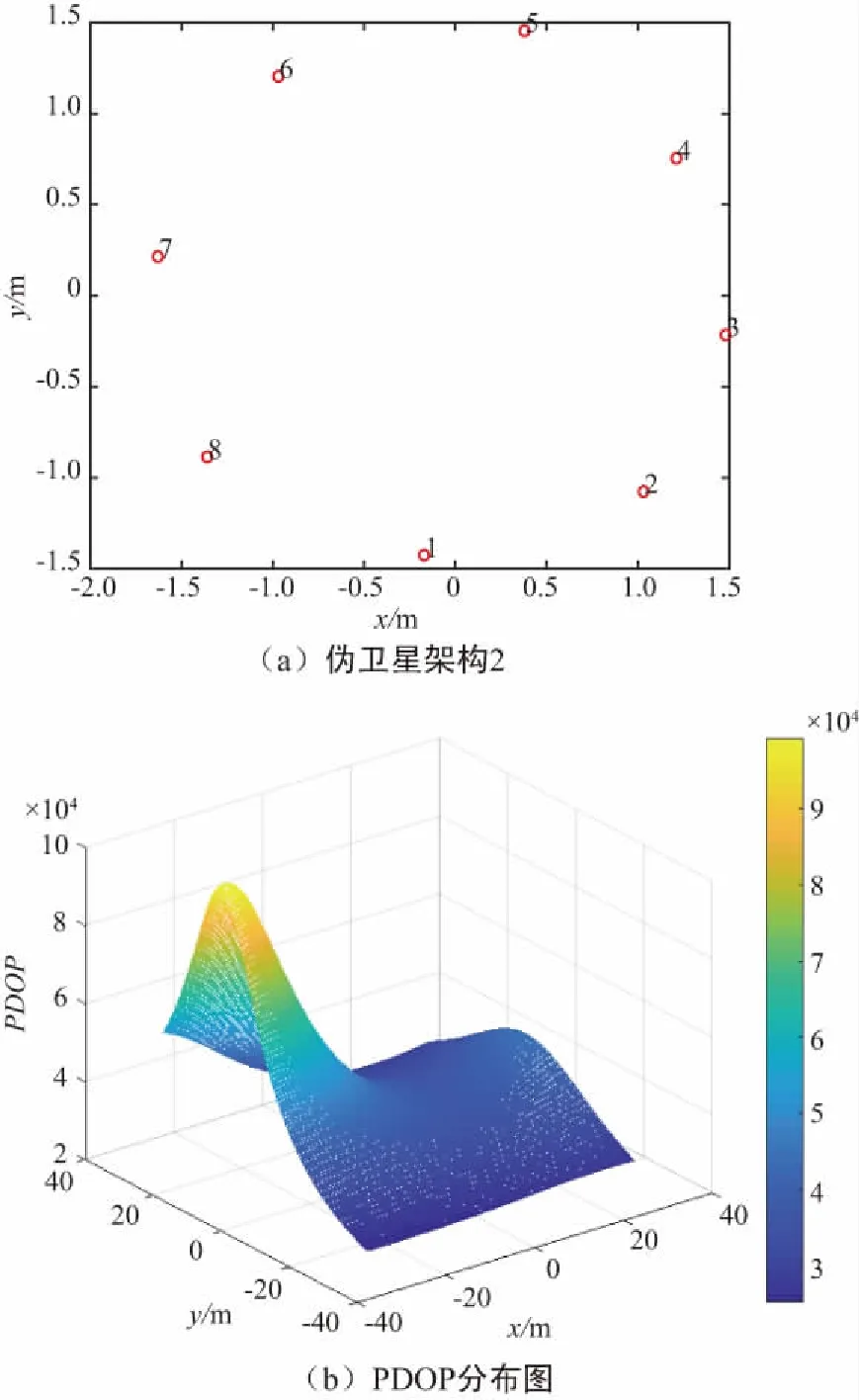
圖2 偽衛(wèi)星架構(gòu)2及PDOP分布示意Fig.2 Pseudo_satellite architecture 2 and PDOP distribution diagram
對(duì)衛(wèi)星導(dǎo)航系統(tǒng)來(lái)說(shuō),為保證定位精度和最小二乘定位算法[5]收斂性,PDOP一般要求小于99,室內(nèi)環(huán)境中大部分區(qū)域都不滿足這一特性,引起定位誤差大甚至使用最小二乘定位算法時(shí),定位不收斂的情況。
室內(nèi)定位中存在的另一個(gè)問(wèn)題在于室內(nèi)環(huán)境復(fù)雜,用戶(hù)機(jī)除了接收到偽衛(wèi)星直射波以外,還會(huì)接收到該直射波多份反射波的斜波,這種反射波對(duì)接收機(jī)性能的影響成為多路徑效應(yīng)[6]。假設(shè)信號(hào)為s(t),直射信號(hào)為A*p(t)*sin(2*pi*f*t),則存在:
s(t)=A*p(t)*sin(2*pi*f*t)+
(4)
接收信號(hào)與本地偽碼相干積分后自相關(guān)函數(shù)[7]表示為:
(5)
反射波的相位φi具有隨機(jī)性,其與直射波的相位關(guān)系具有不確定性。由于室內(nèi)環(huán)境相比室外環(huán)境[8-9]更為復(fù)雜,多路徑效應(yīng)也更加顯著,出現(xiàn)二次反射波或者多次反射波,嚴(yán)重影響自相關(guān)函數(shù)特性[10-11],降低碼相位和載波相位精度,進(jìn)而影響偽距測(cè)量精度,降低接收機(jī)用戶(hù)定位和定速精度。由于載波相位測(cè)量值相位[12]誤差最大不超過(guò)90°,即1/4波長(zhǎng),誤差為cm級(jí),所以在一定條件下通過(guò)載波相位平滑偽距對(duì)偽距測(cè)量精度有較大的提升作用。在室內(nèi)環(huán)境下對(duì)偽距測(cè)量值和載波相位平滑偽距值進(jìn)行測(cè)試,其實(shí)測(cè)結(jié)果如圖3所示。
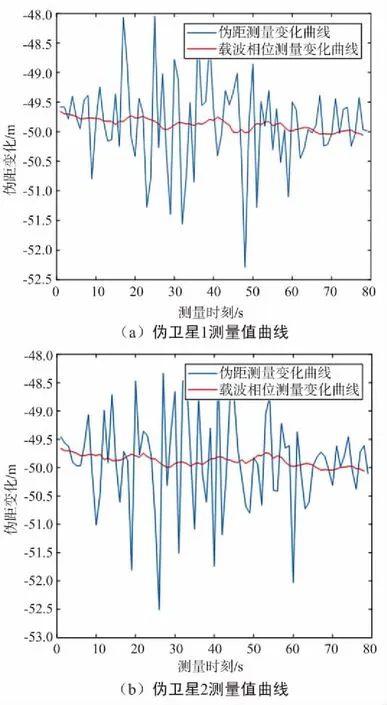
圖3 偽距測(cè)量誤差和載波相位誤差示意Fig.3 Pseudo-measurement error curve and carrier phase measurement error curve
由圖3可以看出,相對(duì)于偽距直接測(cè)量,多路徑效應(yīng)對(duì)載波相位測(cè)量值的影響會(huì)更小,所以采用載波相位平滑偽距的方式可以減少偽距測(cè)量值中的多路徑誤差,同時(shí)在接收機(jī)中可以通過(guò)窄相關(guān)處理,多路徑消除等技術(shù)手段減少多路徑效應(yīng)對(duì)接收機(jī)的影響。
2 遍歷算法
從上述分析可以得出,室內(nèi)環(huán)境存在偽距測(cè)量精度低、幾何位置精度因子差的特點(diǎn),這2種因素會(huì)造成最小二乘定位算法發(fā)散不收斂,所以這種傳統(tǒng)的定位算法不再適合于室內(nèi)定位。同時(shí),室內(nèi)環(huán)境存在用戶(hù)動(dòng)態(tài)低、高程變化慢的特點(diǎn),結(jié)合這些特點(diǎn),為了實(shí)現(xiàn)室內(nèi)偽衛(wèi)星定位功能,開(kāi)發(fā)了一種新的室內(nèi)定位算法——遍歷定位算法,新算法具有穩(wěn)定性強(qiáng),對(duì)偽距測(cè)量精度要求低的特點(diǎn)。遍歷定位算法主要依據(jù)載波相位平滑偽距,在上一個(gè)定位點(diǎn)的一定范圍內(nèi)平面搜索最符合偽距變化規(guī)律的位置作為新的定位點(diǎn),這就要求在室內(nèi)環(huán)境中存在一個(gè)基準(zhǔn)點(diǎn)位置作為遍歷定位算法的初始值,而室內(nèi)環(huán)境很容易能夠滿足這一要求。遍歷定位算法的流程如圖4所示。
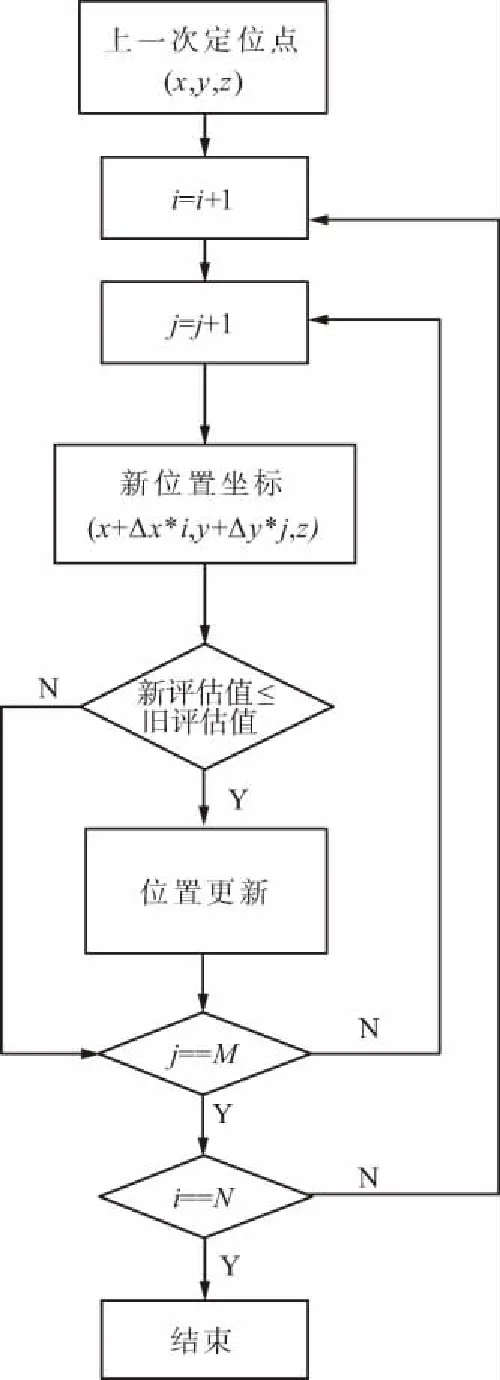
圖4 遍歷定位算法流程示意Fig.4 Traversal localization algorithm flow diagram
圖4中Δx,Δy分別為平面垂直兩方向搜索步長(zhǎng),決定了搜索精度;M,N為步進(jìn)次數(shù),決定了平面搜索范圍。
通過(guò)載波相位得到一組偽距測(cè)量值R,通過(guò)假設(shè)位置點(diǎn)估計(jì)另外一組偽距估計(jì)值Rt1,通過(guò)這2組偽距值計(jì)算評(píng)估值來(lái)評(píng)估當(dāng)前位置是否為最優(yōu)位置。偽衛(wèi)星位置為Pn,上時(shí)刻偽衛(wèi)星位置為Pt0=(x,y,z),下一時(shí)刻假設(shè)位置為Pt1=(x+Δx*i,y+Δy*j,z),則有:
(6)
E=R-Rt1,
(7)
式中,E為偽距測(cè)量值和偽距估計(jì)值之間的誤差向量。實(shí)際工程中,接收機(jī)和偽衛(wèi)星中都存在鐘差等一系列共性誤差,為了消除這些誤差對(duì)評(píng)估值的影響,根據(jù)誤差具有共性的特點(diǎn),對(duì)誤差向量E取單差,改進(jìn)后的誤差向量為:
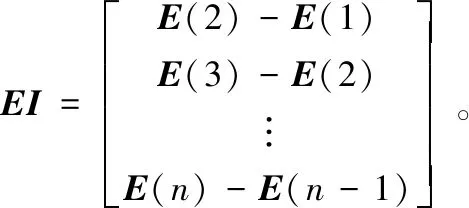
(8)
誤差向量EI表示假設(shè)位置點(diǎn)偽距估計(jì)值和實(shí)際的偽距測(cè)量值之間的誤差,其模值越小則和實(shí)際坐標(biāo)點(diǎn)越匹配,在合理范圍內(nèi)搜索出的最小模值點(diǎn)即為下一時(shí)刻的坐標(biāo)定位點(diǎn)。坐標(biāo)點(diǎn)誤差分布曲線和投影曲線如圖5所示。
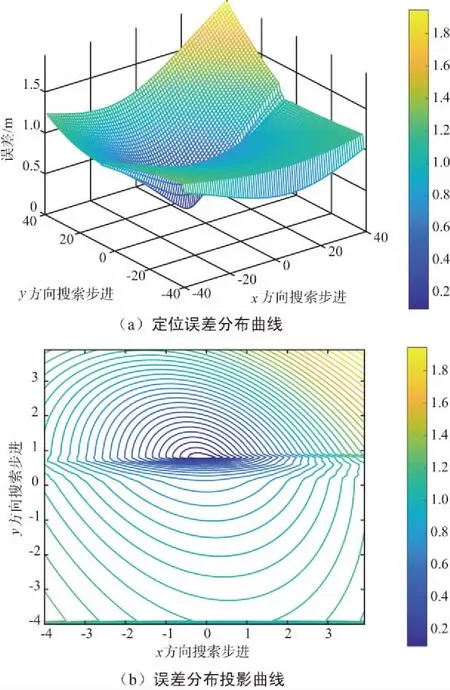
圖5 遍歷誤差分布曲線及投影曲線示意Fig.5 The error distribution curve and projective curve
3 遍歷算法定位結(jié)果
相對(duì)于最小二乘算法,遍歷算法需要占用更多的資源,而且隨著搜索精度和范圍的提高,搜索所需時(shí)間將幾何增長(zhǎng),極大限制了遍歷算法在室內(nèi)定位中的工程實(shí)現(xiàn)。為了滿足室內(nèi)定位工程需求,需要對(duì)遍歷算法搜索范圍和精度進(jìn)行合理分配,在硬件限制范圍內(nèi)實(shí)現(xiàn)不同精度要求。通過(guò)工程測(cè)試,其定位效果如圖6(b)所示。
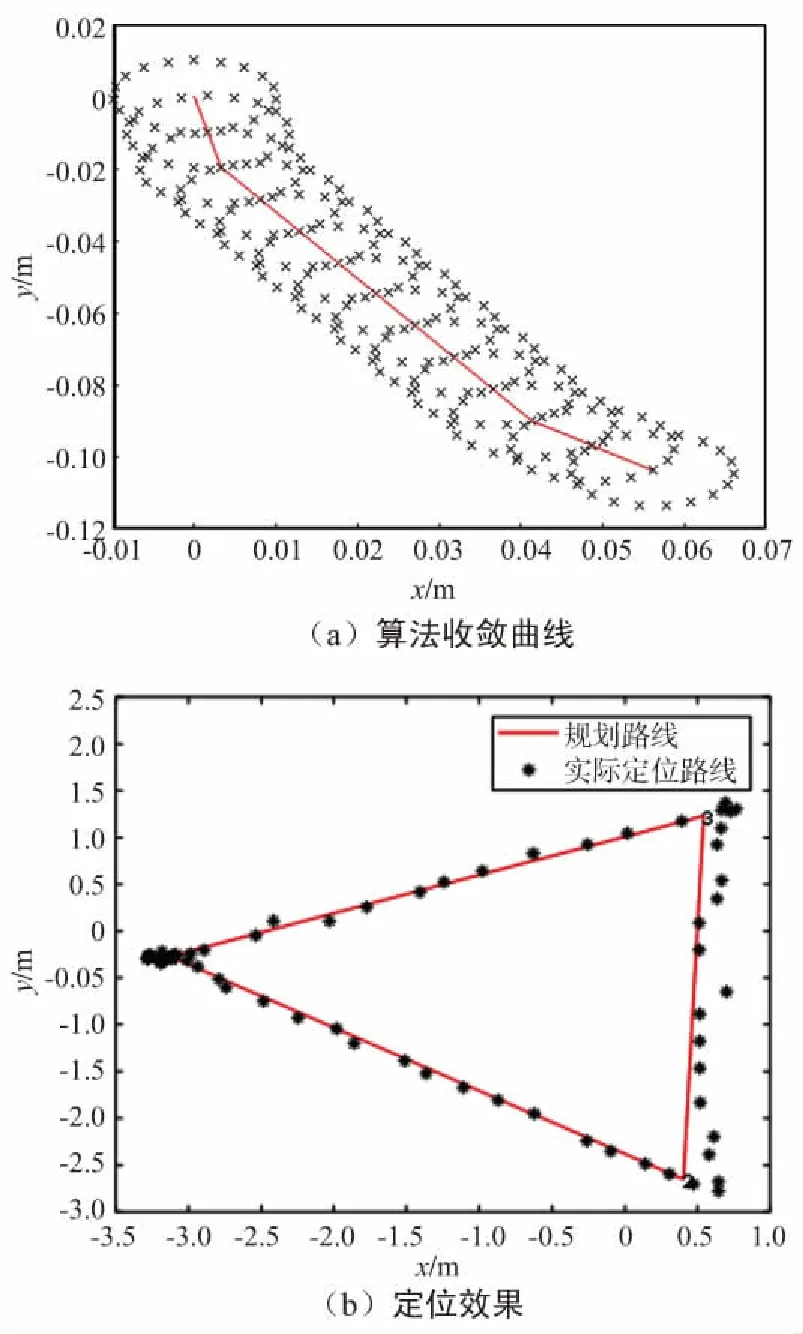
圖6 遍歷算法收斂曲線和定位效果Fig.6 The convergence curve of the traversal algorithm and positioning effect chart
圖6(b)中直線為規(guī)劃路線,黑色為遍歷算法定位曲線。實(shí)驗(yàn)證明,遍歷算法定位曲線和實(shí)際規(guī)劃路線基本重合,定位誤差在0.3 m以?xún)?nèi),并且能夠最終在起始點(diǎn)閉合,滿足室內(nèi)定位精度需求。
4 結(jié)束語(yǔ)
目前,室內(nèi)定位實(shí)現(xiàn)手段眾多,為了滿足室內(nèi)定位需求,采用多元融合的形式進(jìn)行定位實(shí)現(xiàn)。偽衛(wèi)星室內(nèi)定位具有精度高、易實(shí)現(xiàn)的優(yōu)點(diǎn),是當(dāng)前室內(nèi)定位的一個(gè)重要手段,有很大的發(fā)展前景。同時(shí),偽衛(wèi)星室內(nèi)定位也存在各種各樣的問(wèn)題有待解決,尤其是多路徑效應(yīng)和高程計(jì)算問(wèn)題。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00