人在環條件下的控制重新分配研究
2020-02-29 10:39:57邵翥陳天紅
科技創新與應用 2020年7期
邵翥 陳天紅
摘? 要:文章基于IFSTA變穩飛機的非線性模型,提出了對于可控故障的舵面控制重新分配方法。本方法根據故障診斷信息,在預置的解決方案中選擇合適的方案,利用可操縱的剩余舵面為飛機提供控制力和力矩,減弱故障對飛行性能和品質的影響。文章進行了數值模擬及人在環試驗,試驗表明控制重新分配算法在復雜操縱和人在回路環境下也能發揮良好的效果。
關鍵詞:舵面故障;控制重新分配;人在環試驗
中圖分類號:V249.4? ? ? ? 文獻標志碼:A? ? ? ? 文章編號:2095-2945(2020)07-0068-03
Abstract: Based on the nonlinear model of IFSTA variable stability aircraft, a new method of control redistribution for controllable faults is proposed. According to the fault diagnosis information, this method selects the appropriate scheme from the preset solutions,the remaining controllable control surfaces are used to provide the control force and moment for reducing the influence of faults on the flight performance and quality. In this paper, numerical simulation and pilot-in-the-loop test are carried out, the test results show that the control redistribution algorithm can also play a good role in the complex control and pilot-in-the-loop situation.
Keywords: control surface faults; control redistribution; pilot-in-the-loop test
引言
飛機操縱面是控制飛機的主要部件,也是安全飛行的關鍵。在飛行過程中,可能會因為敵方武器攻擊、結冰、飛控系統故障、傳動機構故障等原因導致操縱面故障。為了提高飛行安全性和可靠性,現代飛機都采用余度設計,多套操縱面互相備份以降低某個操縱面發生故障后對飛行安全的影響,這也給診斷出飛機故障后采取補救措施提供了有利條件。控制重新分配技術就是利用飛機舵面的冗余機制,使用正常舵面代替故障舵面的功能,達到保障飛行安全的目的[1]。
1 控制重新分配技術原理
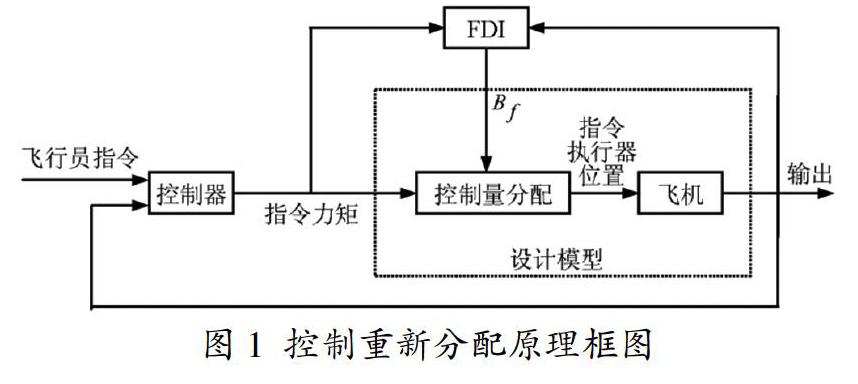
本文的控制重新分配技術依賴于故障診斷技術,由于篇幅原因,未能詳細描述故障診斷技術,且認為試驗中所涉及的飛機系統可快速識別診斷舵面故障。在識別故障之后,采用控制量分配法重新分配舵面命令,原理如圖1。控制量分配算法把輸入看做是期望的力和力矩,而期望的力和力矩ud的產生是通過一定的算法從控制輸入u中選擇得到的。這種算法能否實現取決于ud∈Rm的維數和故障后矩陣Bf∈Rn×k(矩陣Bf可以采用FDI或系統辨識獲得)的列的秩[2,3]。
控制重新分配算法主要用于有控制輸入冗余的系統,其具體計算流程如下:飛機系統出現故障后,我們對控制重新分配算法的期望結果為式(1),即重新匹配的舵面控制命令ur應使得系統在故障情況下保持與原期望輸出相同,也就是飛行員和飛控系統無需因為故障修改控制輸入,達到消除故障影響的目的[4,5]。
期望達到的效果為:
Bfur≈Bu (1)
其中Bf=BFi,ur=Diu。考慮到出現完全故障時,會因為Fi某一行全部為0而導致等式無法成立,所以無法兩邊同時乘B的逆矩陣(或廣義逆)以去掉B,但是該式應對所有u成立,所以有控制重新分配矩陣為[6]:
Di≈(BFi)+B (2)
2 舵面故障分類
通過對舵面故障進行分類,列出控制重新分配技術所適用的舵面故障模式將有利于準確補償故障帶來的不良影響。常見的飛機舵面故障有以下幾類:
(1)舵面卡死及偏角不足故障:此類故障是最常見的舵面故障,發生這類故障后,由于舵面控制力大幅減弱,會對飛行安全帶來嚴重危害。
(2)舵面偏轉速率不足故障:此類故障由電源掉電、液壓泄露等原因導致。表現為舵面的偏轉速率降低,無法與駕駛桿的操作或飛控命令相統一。舵面雖然實時跟隨最新指令,但實際偏角和偏轉速率卻達不到指令要求。
(3)舵面操縱延遲:舵面操縱延遲是因為信號傳輸、指令傳遞出現延遲導致舵面反應不及時,這類故障會使舵面動作統一延遲一段時間。雖然舵面實時的動作與指令是不協調的,但是并不會丟失任何部分的舵面指令。
(4)舵面限幅:此類故障是由某一環節的機械卡阻或電子元件飽和導致的。表現為在小幅操縱時,舵面偏轉正常。隨著舵偏指令逐漸增大,舵面偏角會被限制在某一值而無法繼續增大。
本文將重點關注控制重新分配技術對常見的舵面偏角不足故障的應急補償能力。
3 數值模擬試驗
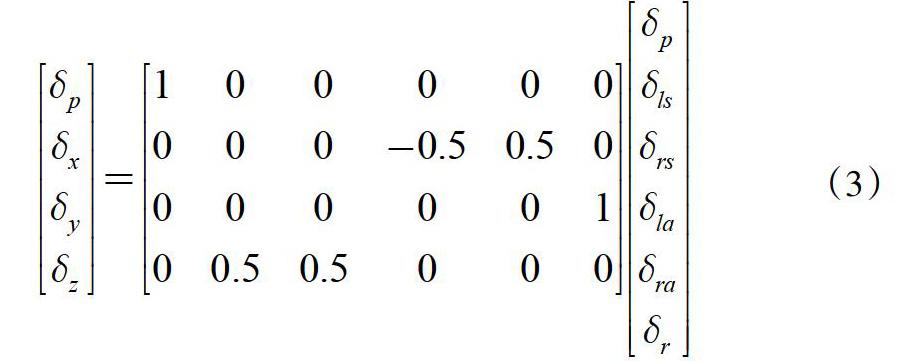
本算例將驗證副翼單邊偏角不足后,使用控制重新分配算法進行容錯控制的可行性。將原本的油門、副翼、方向舵、升降舵四個輸入量擴展為油門、左升降舵、右升降舵、左副翼、右副翼、方向舵形式的六路輸入,即:
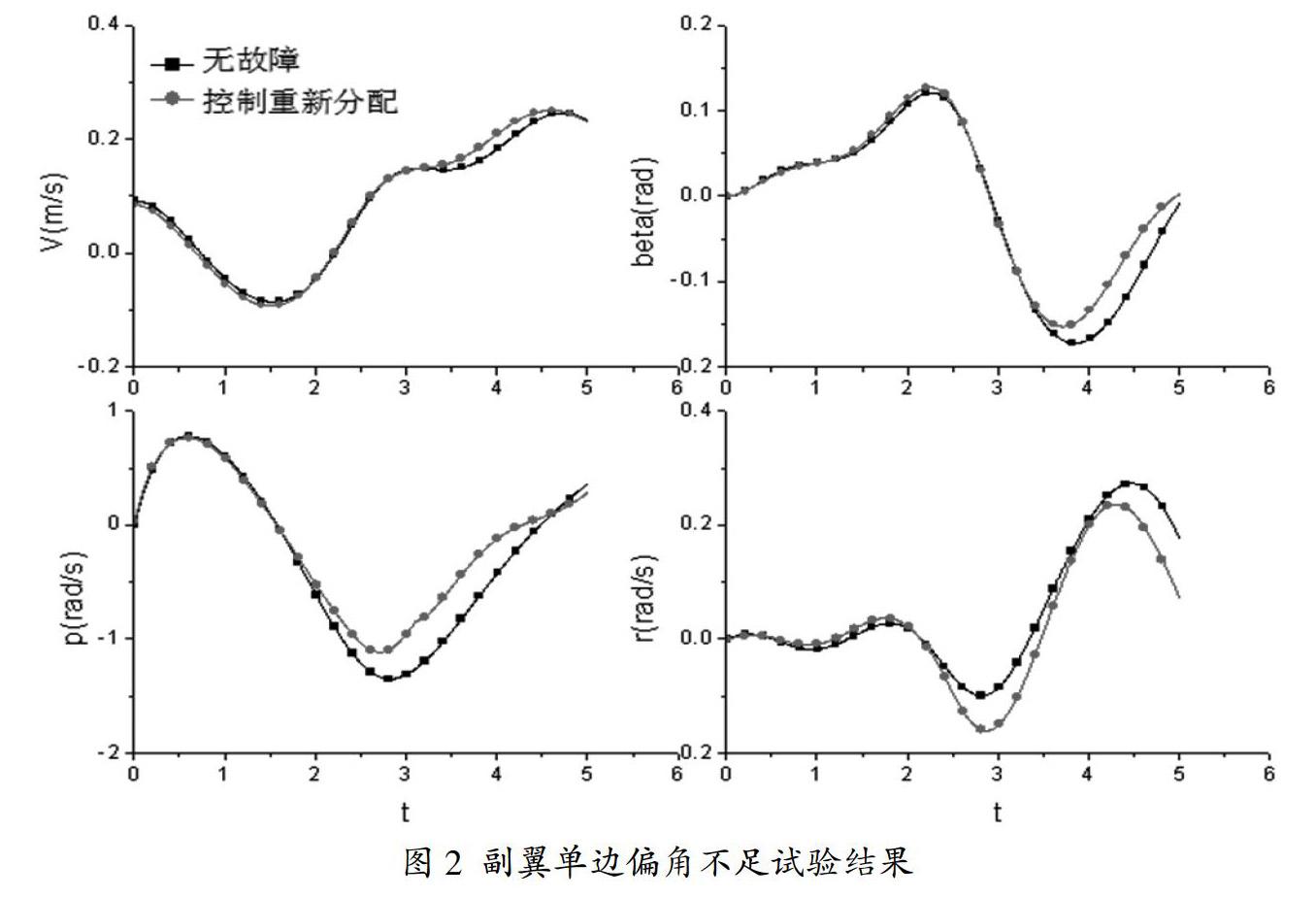
本算例在t=1.2s時,加入右副翼偏角不足故障,使得右副翼的偏轉角度只能達到命令值的50%。當故障診斷算法識別到此故障時,將會根據第一節中的計算方法計算得到控制重新分配矩陣。此矩陣重新分配了左右副翼的控制命令,使得受損的右副翼偏角減小,使功能正常的左副翼偏角增大,以補償右副翼損失的控制效能。整個過程的主要飛行參數變化曲線如圖2。
由圖中兩個角速率的變化情況可知,經過控制重新分配后,角速度逐漸與輸入指令相匹配,飛機的操縱特性逐步恢復到正常狀態。而速度和側滑角則存在一定穩態誤差,這部分穩態誤差需要飛行員自行修正。
4 人在環試驗
人在環試驗的試驗環境為帶有可活動基座的六自由度高仿真模擬器,可以最大程度使飛行員感受到實際飛行的感覺,使飛行員的習慣和反應與實際飛行接近,有利于提高人在環試驗的可參考性。本試驗中,飛行員在配平點配平后,進行縱橫航向混合輸入,在飛行過程中隨機加入升降舵偏角不足故障,通過故障識別算法診斷故障后,根據故障重新分配控制命令。
圖3展示了同樣輸入下,無故障狀態和發生、識別故障,并采用控制重新分配算法進行控制補償兩種狀態的區別。所展示的區間內全程存在升降舵故障,在t=177.69s時,開始實施對升降舵的控制補償。可以看出,各縱向參數逐漸恢復到無故障時的狀態值,尤其迎角等變化明顯,效果顯著。速度等參數則與上文的結果類似,這類參數在經歷過故障發生、識別、處理后會與無故障狀態值存在穩態誤差,需要使用其他方法進行修正和恢復。整個過程消除了升降舵故障所帶來的影響,且對橫航向參數影響較小,證明控制重新分配算法在復雜的人在環情況下也具有一定實用性。
5 結束語
本文針對所選飛機模型,提出了一種控制重新分配方法,并對常見的舵面故障進行了分類。選取橫向和縱向的舵面偏角不足故障為算例,經過數值模擬試驗及人在環模擬器試驗,驗證了此方法在較復雜輸入及人在環環境下均有較好的容錯控制效果。
參考文獻:
[1]郭玉英.基于多模型的飛機舵面故障診斷與主動容錯控制[D].南京:南京航空航天大學,2009.
[2]Curtis Steven Clark,Multiple Model Adaptive Estimation And Control Redistribution Performance on The VISTA F-16 During Partial Actuator Impairments[R]. Wright-Patterson Air Force Base,1998.
[3]Robert Weston Lewis Senior,Multiple Model Adaptive Estimation And Control Redistribution For The VISTA F-16[R]. Wright-Patterson Air Force Base,1997.
[4]聞新,張洪鎖,周露.控制系統的故障診斷和容錯控制[M].北京:機械工業出版社,1998.
[5]張平,陳宗基.飛機操縱面故障研究及其補償重構[J].飛行力學,1997,15(3):69-74.
[6]L. Ni and C. R. Fuller. Control reconfiguration based on hierarchical fault detection and identification for unmanned underwater vehicle[J]. Journal of vibration and control, 2003,9:76-83.