近海海洋信息實時采集傳輸系統設計與實現
2020-02-07 05:15:14劉培學陳玉杰
海洋科學 2020年11期
劉培學, 閆 東, 董 麗, 陳玉杰
近海海洋信息實時采集傳輸系統設計與實現
劉培學1, 閆 東2, 董 麗1, 陳玉杰1
(1. 青島黃海學院, 山東 青島 266427; 2. 煙臺大學, 山東 煙臺 264005)
近海海洋環境是最易受污染的區域, 實時對海洋信息進行監測對近海養殖業、漁業有重要的作用。傳統信息采集方法效率低下、傳輸距離近、能耗高、數據采集不準確, 針對上述問題, 設計了一種實時海洋信息采集傳輸系統, 采集終端能夠自動采集近海海洋環境的溫度、溶解氧、pH值并通過無線網絡將信息傳給岸基協調器, 岸基協調器可通過提出的二次卡爾曼濾波方法對信息進行濾波處理并由4G網絡將信息上傳至云平臺。實驗結果表明: 系統能夠對近海海洋環境進行信息實時采集, 采集數據誤差小, 具有較高的一致性, 功耗低, 用戶可隨時隨地查看信息。
近海海洋; 信息采集; 無線傳輸; 環境監測
我國是一個海洋大國, 大陸海岸線長達18 000多公里, 近海海洋環境是海洋最易受污染區域, 近海岸海洋環境與人民生活息息相關[1]。對近海海洋信息進行實時采集監測, 對近海海洋養殖、海洋旅游產業等具有十分重要的意義[2]。目前, 近海海域的海洋環境參數測量主要采用人工測量、浮標測量兩種方式。人工測量時測量儀器需要掛到測量船只上, 測量員駕駛船只在近海岸巡航測量, 測量完一片海域后返航, 到岸后整理數據; 浮標測量是將測量裝置放置在浮標上, 利用GPRS網絡將數據傳輸到指定服務器, 服務器接收數據, 電源部分由電池和光伏板共同供電。兩種方式各有各的缺點, 人工測量不能長期連續測量、數據有間斷、測量周期長, 浮標測量耗電量大、傳輸速率慢、成本高, 同時, 近海較復雜的電磁環境也容易對浮標測量的無線傳輸產生干擾。上述問題導致了近海海洋信息監控系統發展緩慢[3-5]。因此, 設計一款實時海洋信息采集傳輸系統具有十分重要的意義。
1 系統架構
系統主要由兩部分組成, 分別是終端數據采集模塊和岸基協調器模塊。終端數據采集模塊對近海海洋信息環境參數進行實時采集, 采用星型鏈路網絡對終端節點進行組網設計形成433M網絡, 通過該網絡將數據發送給岸基協調器模塊[6-7]。岸基協調器包含數據顯示模塊、4G網絡傳輸模塊等, 能夠接收終端數據采集模塊上報的信息、分類存儲及完成數據上報工作。岸基協調器接收收據后, 首先對數據進行融合, 對參數真實值進行最優估計, 消除電磁干擾等各種干擾信號導致的錯誤數據及傳感器本身測量不準確度帶來的采集誤差, 隨后把數據按照溶解氧、溫度、pH值以及數據采集終端節點編號進行分類存儲, 同時通過4G網絡將信息上傳至云平臺, 供用戶查看, 系統整體結構如圖1所示。
2 硬件設計
硬件設備是實現海洋信息實時采集監測的關鍵, 系統由岸基協調器和終端采集器兩部分構成, 其中, 終端采集器工作在海洋中, 供電是重點需要解決的問題, 因此, 硬件系統的低功耗設計方案, 是本文介紹的重點。
2.1 岸基協調器設計
岸基協調器系統結構如圖2所示, 協調器由STM32控制器、4G模塊、433M模塊、顯示模塊、時鐘模塊和電源模塊等部分組成。STM32控制器為整個岸基協調器的控制芯片, 4G模塊負責信息遠程通信; 433M模塊實現多節點和433M網關之間的有機結合, 實現端到云的一步傳輸; 顯示模塊采用液晶觸摸屏來顯示相關數據信息和采集觸摸按鍵信息, 實現客戶端的人機交互功能, 時鐘模塊和電源模塊分別提供時鐘頻率和電源。
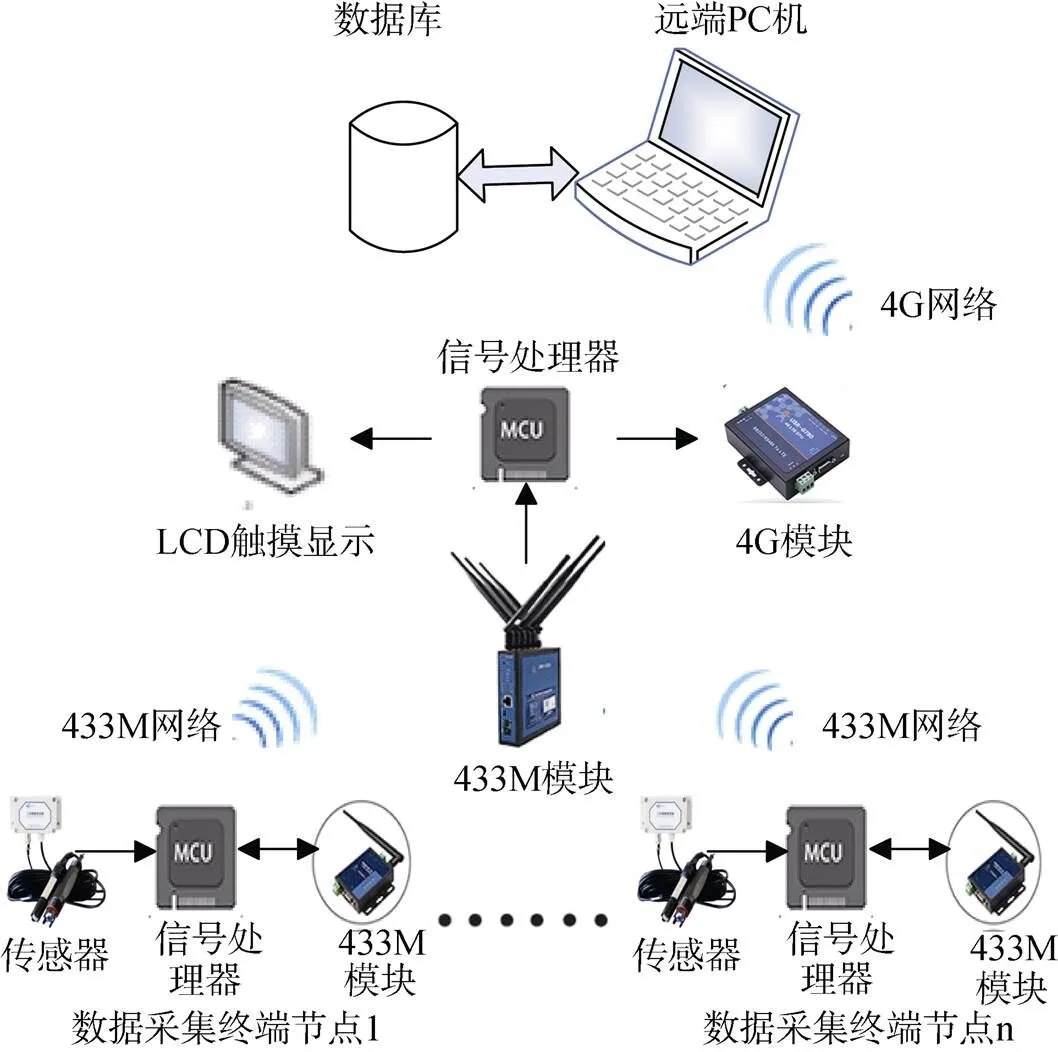
圖1 系統整體結構圖
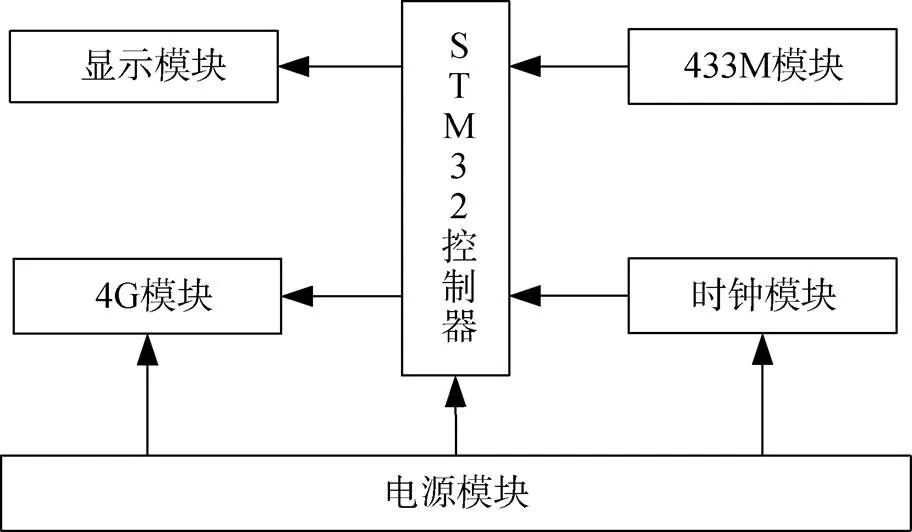
圖2 岸基協調器系統結構圖
控制器選擇ARM微控制器STM32F103VGT6, 該處理器是一種32位處理器, 具有1 024 kB的程序存儲器、96 kB的數據存儲器, 自帶模擬/數字轉換器(ADC), 功能強大, 能夠滿足本次設計需要。4G模塊采用USR-G780 V2, 支持5模13頻移動、聯通、電信4G高速接入。USR-G780 V2軟件功能完善、使用方便, 通過簡單的設置即可實現串口到網絡的雙向數據透明傳輸。該模塊具有高速率、低延時、極速響應快速透傳的特點, 并且支持TCP Client, TCP Server 和 UDP Client, UDP Server, 支持串口AT指令。433M模塊選用SX1278, 和采集數據終端模塊的SX1278進行組網, 一步到位實現端到云的無線數據傳輸。顯示模塊選用翼盟4.3寸電容觸摸液晶屏LCD模塊, 該模塊屏幕分辨率為800×480, 16位真彩顯示, 采用NT35510驅動, 自帶GRAM, 無需外加驅動器, 方便單片機的驅動。模塊采用電容觸摸屏, 支持5點同時觸摸, 操控效果非常好, 本次設計中, 4G模塊、433M模塊通信串口分別連接于控制器的第一、第二串口。
2.2 終端采集器設計
信息采集終端設計重點為低功耗設計及各種傳感器校準設計。本次設計中MCU選擇為低功耗STM8S105K4T6芯片, 供電電路如圖3所示。S1是貼片開關, C3為濾波電容, C4為退耦電容, TPS78230的5號引腳是穩壓后3.0 V輸出引腳, 3號腳為使能引腳, 與單片機的PC6引腳相連, 高電平使能打開, 低電平使能關閉, 關閉時切斷除MCU外的所有電源, 即只有MCU供電且為休眠狀態。從而實現低功耗設計。在本設計中, 將MCU的AD轉換基準電壓設定為2.5 V, 2.5 V數字電源由電源管理電路輸出的3 V電源通過TL431穩壓輸出(采用TL431直接輸出2.5 V電路)。數字2.5 V通過10UH的電感轉換為2.5 V的模擬電源, 數字地與模擬地通過0歐電阻相連, 降低相互干擾。
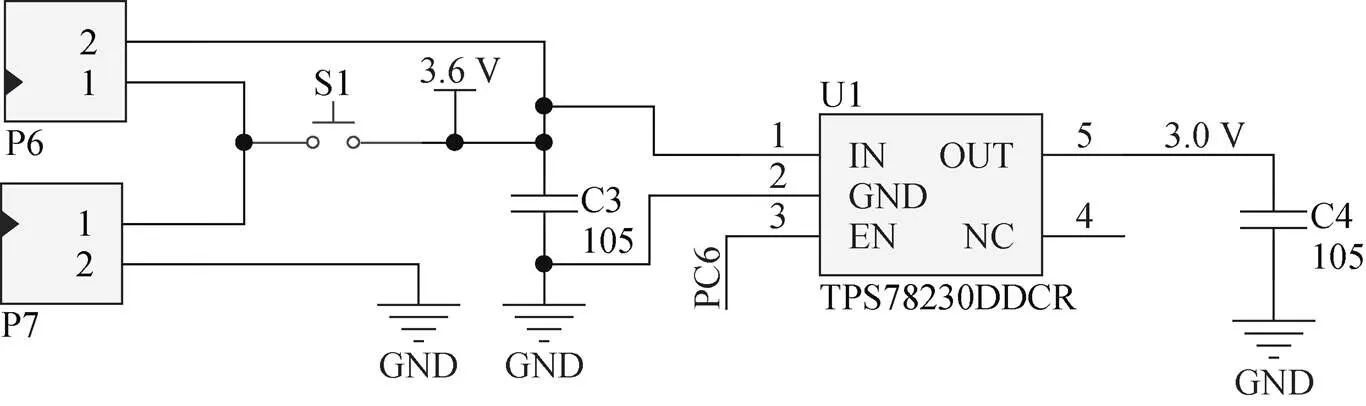
圖3 供電電路圖
溫度采集模塊采用KTR-DS18B20[8], 該傳感器采用不銹鋼管封裝, 防水密閉, 適合在海洋環境中使用。溶解氧傳感器采用GC-11型傳感器, 輸出信號電壓范圍為0~10 mV, 測量范圍為0~30 mg/L, 輸出阻抗約為20 kΩ。pH值傳感器選用了pH復合電極, 輸出為電壓信號, 零電位為7 pH, 誤差為0.5 pH, 內阻≤250 MΩ, 在pH 0~14內輸出信號電壓為線性電壓, 輸出穩定, 適用于近海浪涌環境下工作。
3 軟件設計
3.1 岸基協調器軟件設計
岸基協調器是上位機和433M局域網之間聯系的橋梁, 一方面, 接受上位機的指令進行相應操作; 另一方面, 接收采集終端上傳的終端數據并進行濾波、顯示和上傳處理。岸基協調器軟件流程如圖4所示, 系統上電后, 進行4G、433M通信模塊初始化、顯示模塊初始化及中斷初始化。通信模塊初始化主要是串口初始化, 進行串口波特率的設置, 建立起串口通信連接。顯示初始化主要是觸摸顯示屏的初始化。中斷初始化主要完成定時中斷、串口中斷的配置, 方便上位機對協調器及下位機的控制命令下達。初始化工作完成后, 循環檢測是否正確接收無線節點發來的數據, 如果是, 就進行線性預測濾波處理并暫時存儲, 線性預測采用二次卡爾曼濾波方式, 參數超標則進行報警。然后進入實時數據顯示界面, 進行實時數據及預警信息的顯示。如果發生中斷, 分為兩種情況。一種是上位機發來的中斷, 需要協調器進行相關指令的執行; 另一種是定時中斷, 用戶沒有特殊需求的情況下, 協調器通過4G網絡定時向上位機進行數據上報。
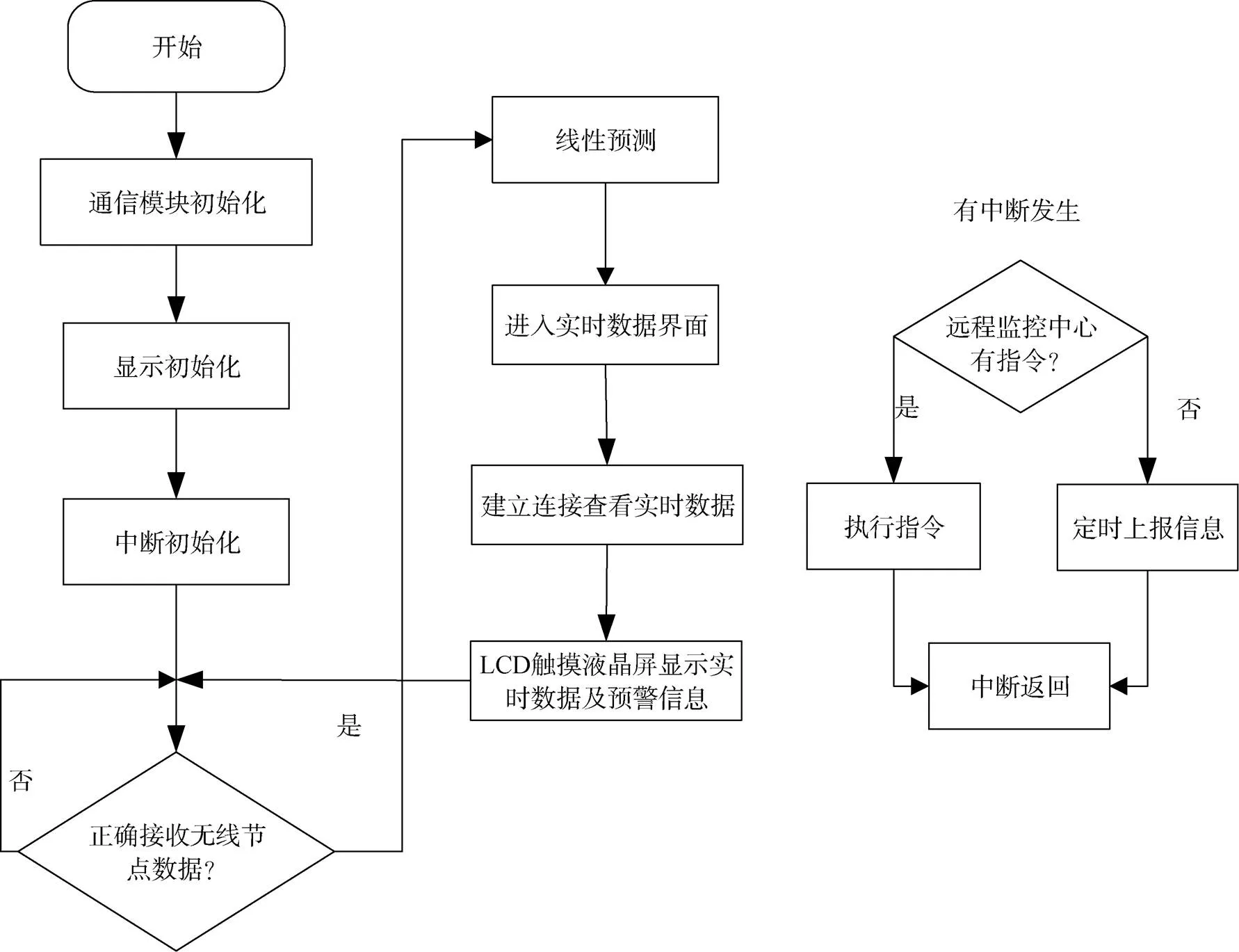
圖4 岸基協調器軟件流程圖
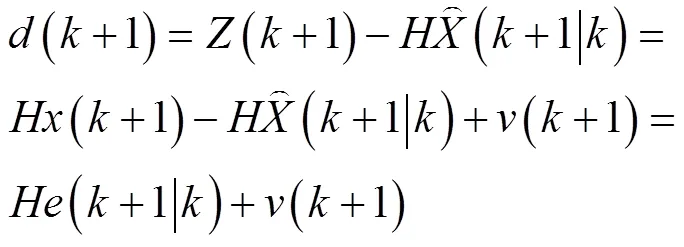
近海環境復雜, 電磁干擾嚴重, 容易出現數據誤傳及丟失情況, 提出了一種二次卡爾曼濾波方法提高數據采集精度, 下面以溶解氧濃度為例分析該方法, 首先分別建立溶解氧濃度的狀態方程和量測方程:
(+ 1) =() +(), (1)
(+ 1) =(+ 1) +(+ 1), (2)
其中,(+ 1) 和()分別為+ 1時刻溶解氧的濃度值和時刻的濃度值,表示狀態轉移矩陣, 它表示+ 1時刻濃度值和時刻濃度值之間的關系, 海水中溶解氧濃度不能突變, 此處取值1,為系統量測矩陣, 表示目標狀態變量對測量變量的增益, 此處取值為1。(),(+ 1)分別為過程噪聲和量測噪聲, 一般假設它們都為均值為零、互不相關的高斯白噪聲, 方差分別為和, 卡爾曼濾波過程包括狀態預測與狀態更新兩個遞推環節, 描述如下:
狀態預測:
求出基于上次濾波值的預測值。
預測誤差協方差為:

求出預測的誤差協方差。
狀態更新:

(+ 1)為卡爾曼增益,

求出濾波誤差協方差, 根據上述公式, 即可完成濾波的遞歸。
公式中的量測噪聲方差通常是測量傳感器引起, 相對比較固定, 因此量測噪聲方差我們采用固定值, 但是過程噪聲是隨機的, 采用固定值會引起濾波不夠精準或濾波發散, 因此采用自適應方式。
定義轉換坐標Kalman濾波中的新息、殘差如下所示:
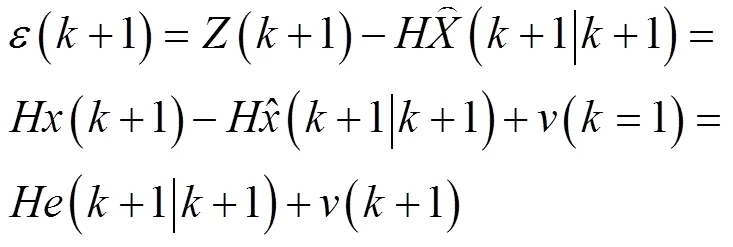
根據新息和殘差正交原理有:
根據新息序列和殘差序列的不相關性, 公式(10)可以化簡為:
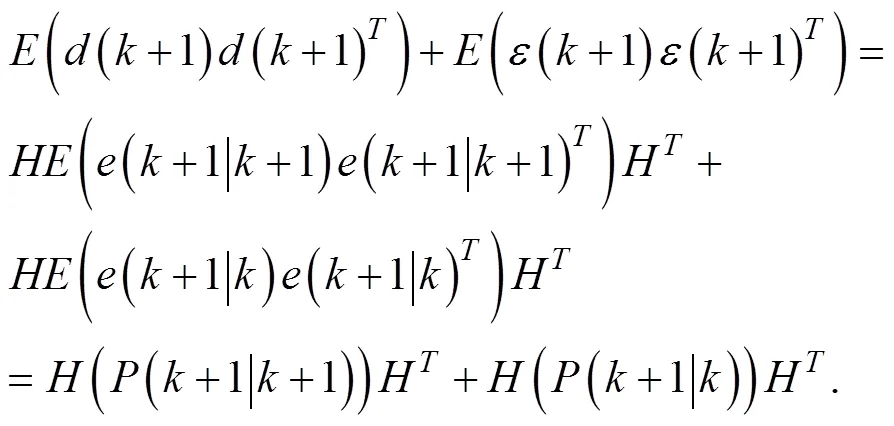
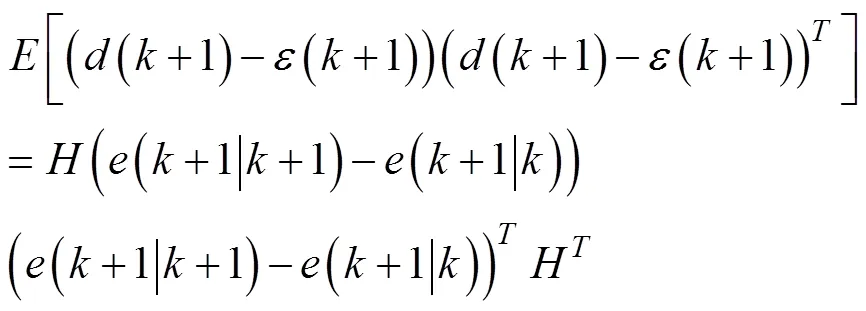
我們可以在濾波的過程中得到新息序列和殘差序列, 因此可以通過統計方法得到兩者實際的方差, 即:


其中,為統計計算時估計窗口的寬度。則由公式(4)、(11)、(12)、(13)可以得到過程噪聲方差的估計值為:
在本文中為單位矩陣, 因此可以化簡為:
由此得出, 過程方差的估計值, 此值為時刻應該采取的過程方差, 故需利用公式1-4, 采用估計的跟傳感器的方差進行二次濾波, 得到較準確的線性預測值, 溫度、pH值采用類似方法處理。
3.2 采集終端軟件流程
本系統中, 采集終端需要完成對無線模塊組網狀態檢測、校準狀態檢測、校準值存儲、溫度數據讀取、pH值、溶解氧傳感器輸出的電壓值的識別、轉化、計算、分析、數據處理、數據無線發送以及休眠喚醒等功能。模塊化的軟件設計使得系統更穩定、分工明確。軟件總體設計流程如圖5所示。
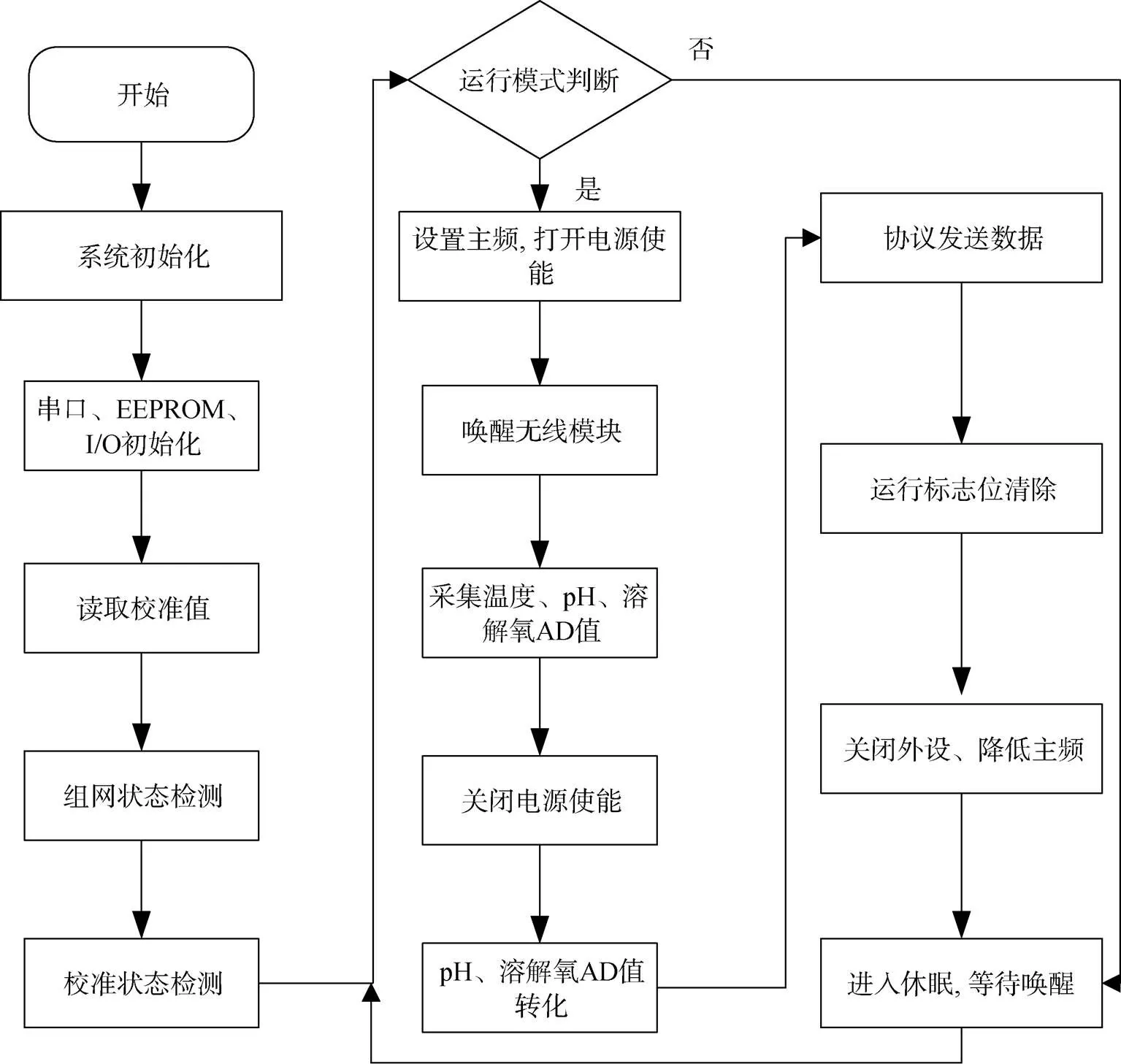
圖5 軟件總體設計流程
系統上電后首先進行系統初始化, 初始化完畢后進入main函數, 初始化變量; 主頻時鐘配置為16 MHz, 等待主頻時鐘穩定后開始初始化串口、EEPROM及I/O口, 讀取EEPROM中存儲的pH值和溶解氧傳感器的校準值, 讀取成功后關閉EEPROM,開始檢測無線模塊是否組網成功(當無線模塊的狀態引腳變為低電平后表示組網成功); 接下來檢測校準功能引腳電平是否為低電平, 如果為低電平則執行校準功能程序, 否則直接執行下一步, 將運行模式標志位置位(開機運行一次后進入休眠模式), 進入運行模式; MCU提高運行主頻, 打開電源管理芯片使能, 給溫度傳感器、pH值、溶解氧信號放大電路供電, 喚醒無線模塊, 讓無線模塊處于發送狀態; 接下來初始化DS18B20, 讀取溫度, 初始化ADC模塊, 開始AD轉化, 數字濾波, 數值量化, 量化完畢后關閉ADC, 關閉電源管理芯片使能; 再給無線模塊發送數據包, 發送完畢后運行標志位清除, 初始化喚醒I/O口, 配置為外部中斷下降沿觸發模式, 降低MCU工作主頻, 同時MCU進入休眠模式, 等待外部中斷將其喚醒進行一下次信息采集。
4 系統測試
在系統完成軟硬件設計后, 對系統進行測試, 系統測試分為室外功耗測試及室內誤差測試兩部分, 首先進行室外功耗測試, 在某近海海域布設6個采集終端、1個岸基協調器進行測試, 采樣深度0.5 m, 采樣速率1次/min, 采集終端分布于該海域養殖工作平臺上, 采集終端與離岸基協調器直線距離范圍為200~600 m, 針對采集終端的電流進行實驗測定, 結果如表1所示。從表中可以看出, 所設計的系統待機工作電流約為200個UA, 工作電流約為10 MA, 較之現有設備幾十至幾百的工作電流有較大幅度的下降。
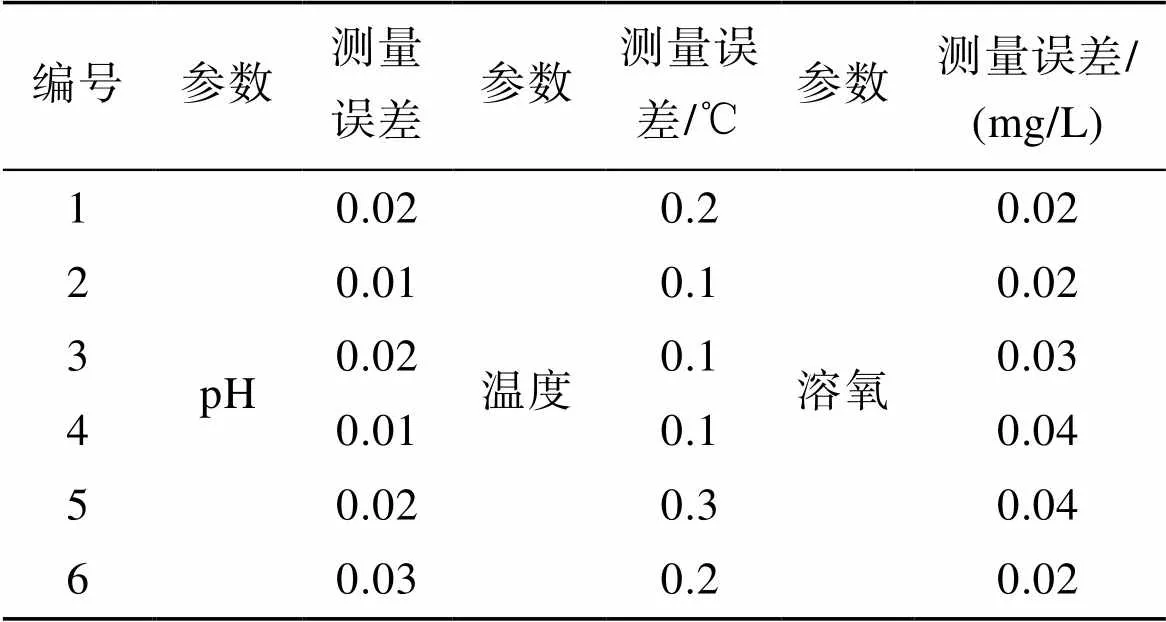
表1 功耗測量表
室內誤差測試由專業測試機構青島華測計量有限公司檢測給出, 采集誤差結果如表2所示。
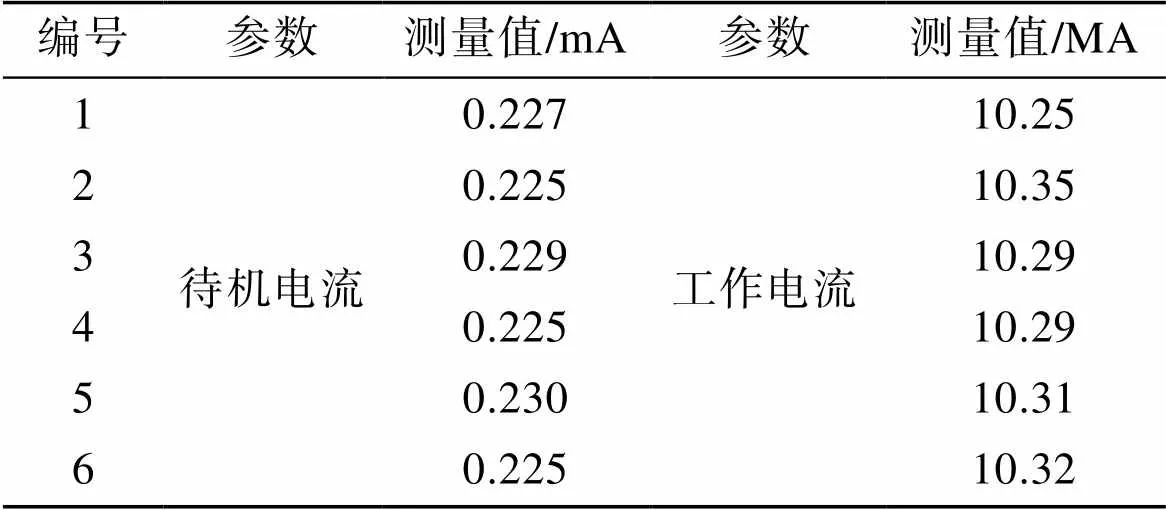
表2 數據測量誤差
從表2數據可以看出, pH值誤差在0.02左右, 溫度誤差不高于0.2, 溶解氧誤差不超過0.04 mg/L, 量測值與計量公司標準儀器具有較高的一致性, 其中溫度參數誤差偏差最大, 誤差滿足海洋觀測規范(GB/T14914.2-2019)中規定的表層海水溫度二級誤差允許規范, pH值、溶解氧誤差較小, 滿足一級誤差允許規范。對于每個采集終端采集誤差, 可采用軟件修正方式進行修正, 使顯示值與真實值更接近。
5 結束語
基于二次卡爾曼濾波方法, 設計了一種近海海洋信息實時采集傳輸系統, 該系統能夠實現近海海洋參數的多點、大范圍監測和無線傳輸, 無需復雜布線, 大大提高了近海海洋信息實時采集效率。同時, 系統具有超低功耗特點, 適合海上長期工作, 能夠為近海海洋養殖業、近海旅游業、近海環保提供數據支撐, 具有較好的應用前景。
[1] 李浩, 任宇輝, 劉鳳嬌. 量子無線通信技術在海洋環境監測中的應用[J]. 海洋科學, 2018, 42(2): 94-98.Li Hao, Ren Yuhui, Liu Fengjiao. Application of quantum wireless communication technology in marine environmental monitoring[J]. Marine science, 2018, 42(2): 94-98.
[2] 謝先偉, 毛紅. 海洋環境監測數據自動分析系統的設計與實現[J]. 艦船科學技術, 2016, 38(12): 121-123. Xie Xianwei, Mao Hong. Design and implementation of automatic analysis system for marine environmental monitoring data[J]. Ship science and technology, 2016, 38 (12): 121-123.
[3] 李穎, 楊光松, 郭文靜, 等. 一種基于ZigBee的海洋環境監控系統設計與實現[J]. 重慶理工大學學報(自然科學), 2018, 32(9): 149-156. Li Ying, Yang Guangsong, Guo Wenjing, et al. Design and implementation of a marine environment monitoring system based on ZigBee[J]. Journal of Chongqing University of Technology (NATURAL SCIENCE), 2018, 32(9): 149156.
[4] 溫玉波. 海洋環境污染信息智能圖像監測技術研究[J]. 現代電子技術, 2018, 41(6): 109-111, 116. Wen Yubo. Research on intelligent image monitoring technology of marine environmental pollution information[J]. Modern electronic technology, 2018, 41(6): 109- 111, 116.
[5] Daniel O B Jones, Andrew R. Gates, Veerle A I, et al. Autonomous marine environmental monitoring: Application in decommissioned oil fields[J]. Science of the Total Environment, 2019, 668.
[6] 王榮. 基于433MHz無線自組傳感器網絡系統的研究與設計[D]. 天津: 天津理工大學, 2018. Wang Rong. Research and design of wireless ad hoc sensor network system based on 433MHz[D]. Tianjin: Tianjin University of Technology, 2018.
[7] 靳熙芳, 王碩. 海洋環境數據智能化監控的現狀與關鍵技術[J]. 海洋預報, 2009, 26(2): 95-102. Jin Xifang, Wang Shuo. Status quo and key technologies of intelligent monitoring of marine environmental data[J]. Ocean forecast, 2009, 26(2): 95-102.
[8] Huimin Lu, Yujie Li, Shenglin Mu, et al. Motor anomaly detection for unmanned aerial vehicles using reinforcement learning[J]. IEEE Internet of Things Journal, 2017, 99: 1-2.
[9] Wang T, Zhang Y, Yan T C, et al. Physics-based coastal current tomographic tracking using a Kalman filter[J]. The Journal of the Acoustical Society of America, 2018, 143(5): 2938-2953.
[10] Nonomura T, Shibata H, Takaki R. Dynamic mode decomposition using a Kalman filter for parameter estimation[J]. AIP Advances, 2018, 8(10): 105-106.
Design and implementation of offshore marine forecast information acquisition system
LIU Pei-xue1, YAN Dong2, DONG Li1, CHEN Yu-jie1
(1. Qingdao Huanghai University, Qingdao 266427, China; 2. Yantai University, Yantai 264005, China)
The offshore marine environment is the most easily polluted area. The real-time monitoring of marine information system is important for offshore aquaculture and fisheries. The traditional methods of collecting information on offshore marine environment are inaccurate, inefficient, have slow transmission speed, and require high energy consumption. In the view of these problems, a real-time ocean information acquisition and transmission system is designed. An acquisition terminal automatically collects data on the temperature, dissolved oxygen, and pH values of the offshore marine environment, and transmits the information to the shore-based coordinator using wireless network. The shore-based coordinator filters the information by the proposed secondary Kalman filtering method and uploads the information to the cloud platform using a 4G network. The experimental results show that the system can collect real-time information of offshore marine environment, and the data acquisition error is small. Also, the system has high consistency, but consumes less power than traditional methods. Users can view information anytime and from anywhere.
offshore ocean; information collection; wireless transmission; environmental monitoring
Dec. 25, 2019
TN915.4
A
1000-3096(2020)11-0087-07
10.11759/hykx20191225001
2019-12-25;
2020-07-04
國家自然科學基金項目(61201457); 山東省重點研發計劃(2019GGX105001、2017GGX201004); 山東省高等學校科技計劃項目(J18KB163); 山東省教育廳高校科技計劃項目(J18KA374); 青島黃海學院校級項目(2018KJ05)
[National Natural Science Foundation of China, No. 61201457; Key R&D plan of Shandong Province, Nos. 2019GGX105001, 2017GGX201004; Science and technology project of colleges and universities in Shandong Province, No. J18KB163, No. J18KA374; Project of Qingdao Huanghai University, No. 2018KJ05]
劉培學(1983-), 男, 山東臨淄人, 副教授, 主要研究方向為嵌入式系統應用, 電話: 15865556723; E-mail: 93987898@qq.com
(本文編輯: 康亦兼)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32