面向航空防護救生的軟質外骨骼助力控制策略研究
2020-02-04 07:28:19徐大文吳青聰陸龍海
航空科學技術 2020年8期
徐大文 吳青聰 陸龍海
摘要:本文設計了一種面向航空防護救生領域的可穿戴軟質外骨骼系統,該系統包含軟質外骨骼服、數據采集系統、傳感檢測模塊以及控制模塊。提出了基于關節力矩估計的助力控制策略,主要包括對肌電信號的采集、濾波和非線性映射。最后通過試驗驗證了此系統在輕度、中度以及重度負載下都有一定的助力效果,滿足航空防護救生系統減輕飛行員肌肉疲勞,增強其自然作業能力,保證飛行員安全的需求。
關鍵詞:可穿戴軟質外骨骼;航空防護救生;關節力矩估計;助力控制策略
中圖分類號:V19文獻標識碼:ADOI:10.19452/j.issn1007-5453.2020.08.011
基金項目:航空科學基金(2017ZC52037)
航空防護救生系統是保障飛行員執行作戰訓練任務中的作戰效能和安全救生的關鍵[1-2]。然而,沉重的個體防護設備嚴重影響了飛行員在執行任務過程中的舒適性和協調性,并且長時間的高過載環境作業極易造成飛行員的生理和心理疲勞,導致作戰效能的降低。此外,在彈射救生過程中,飛行員有可能會落入荒原、深林、海洋等惡劣環境中,易造成四肢損傷,從而失去自我營救的能力[3]。專家們已經針對彈射救生中遇到的問題展開了相關研究[4]。可穿戴式軟質外骨骼機器人是解決這些難題的有效工具[5-7],飛行員穿戴外骨骼,形成人機協調的智能混合體,并基于飛行員的運動意圖,輔助其執行飛行作業和救生任務。外骨骼機器人實現了人的“智力”與機器人的“體力”的有效結合[8],在國防安全和醫療康復等領域具有廣闊的應用前景與重要的研究意義。
飛行員在航空作業中穿戴的個體防護救生裝備需具有結構輕柔、穿戴舒適、質量可靠的特點。為了滿足上述要求,本文依據相關理論設計了一種面向航空防護救生領域的上肢軟質外骨骼系統,并且提出基于估計扭矩的助力控制策略,通過試驗驗證了其助力效果,適用于航空防護救生領域。
1軟質外骨骼方案設計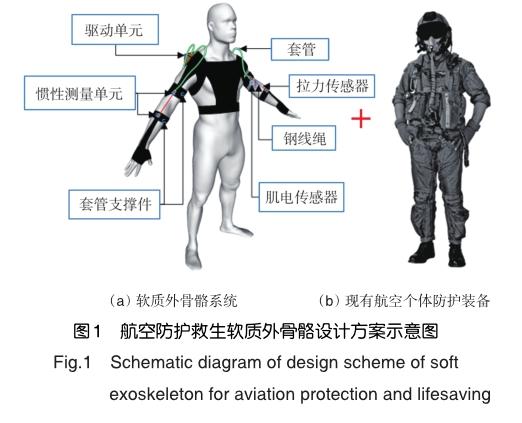
圖1為助力軟質外骨骼設計方案。系統的機械部分整合在外骨骼服上,由伺服電機驅動;執行機構采用套索(鋼絲繩+套管)傳動的形式,實現驅動電機與執行機構的分離;將肌電傳感器貼在肱二頭肌中束,檢測肌電信號;拉力傳感器的一端與鋼絲繩相連,一端與套管支撐件相連,用來測量繩上的拉力;最后使用慣性測量單元測量飛行員的肘關節角度。圖1(a)中的黑色部分為人體穿戴的外骨骼服,它貼合飛行員上半身,并提供驅動力,同時不會阻礙現有個體防護裝備(圖1(b)中的頭盔、面罩、抗荷服、代償服、防寒服等)的工作。套管支撐件的材料是低溫熱塑板,密度小,耐老化。它受熱易變形,冷卻后形狀固定,能和肢體形狀高度匹配,與飛行員接觸處壓強較小,保證外骨骼的穿戴舒適性。
1.1基于肌電傳感器的扭矩估計策略
本文提出了一種基于肌電傳感器的關節扭矩估計算法[9],該算法簡單易操作,并且可以獲得飛行員的實時連續的關節扭矩估計值。在10~500Hz帶通濾波和50Hz陷波濾波的基礎之上,再使用頻率為410Hz的一階巴特沃斯高通濾波器,去除肌電信號中的能量[10],通過全波整流以及1Hz的一階巴特沃斯低通濾波器,獲得原始肌電信號的包絡。包絡代表的是肌肉發力的趨勢,為了將其具體化、數字化,對肌電信號進行歸一化和非線性映射,最終估計的扭矩在0~100N?m內[8],其公式為: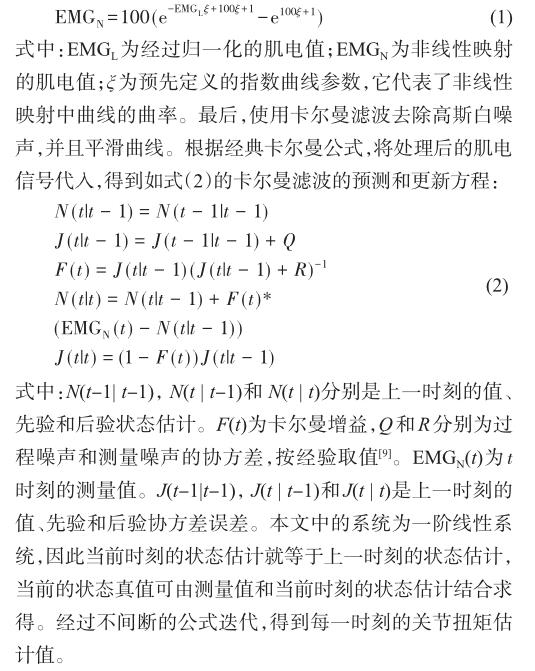
1.2基于估計扭矩的PID助力控制策略
控制策略以PID控制器為基礎,省略了復雜的套索模型。控制器的輸入是估計得到的關節扭矩,閉環反饋是基于拉力傳感器和關節的數學模型計算得到的實際扭矩。以實際扭矩來跟蹤估計的扭矩,從而實現關節的運動。上肢外骨骼助力系統需要融合飛行員的智力與機器人的體力,根據飛行員的需求,實現力量增強和運動輔助。控制器得到飛行員的運動意圖,通過電機驅動外骨骼,帶動飛行員的上肢運動,進而達到助力效果。控制策略框圖如圖2所示。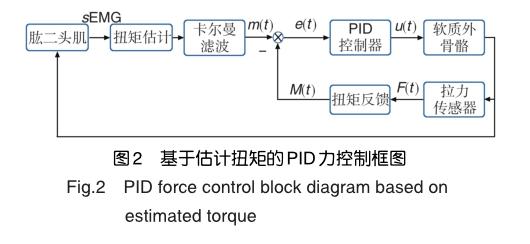
2試驗驗證
2.1平臺搭建
為了驗證該系統在面對航空救生領域的有效性,我們安排了受試者代替飛行員進行有效性試驗。控制系統和試驗平臺如圖3和圖4所示。系統主要包括軟質外骨骼服、數據采集系統、傳感檢測模塊以及控制模塊。xPC Target目標環境是宿主機和目標機配合工作的方式。宿主機主要負責代碼的撰寫、編譯、調試以及運行,而后通過RS232串口線將編譯生成的可執行控制代碼下載到目標機中,最后控制系統物理硬件部分實現控制代碼指令。試驗時,受試者將軟質外骨骼服穿戴在身上,慣性測量單元記錄肘關節的運動情況,STM32中運行角度轉換算法,后經RS232串口通信的方式將計算得到的角度傳送到目標機中。編碼器記錄電機的信息。目標機中裝有PCL-818數據采集卡和PCL-727輸出卡,前者用于實時采集拉力傳感器、肌電傳感器與編碼器的信號,后者將控制信號發送給伺服驅動器,驅動電機,通過上肢外骨骼驅動裝置、套索傳動系統和軟質外骨骼向飛行員提供輔助力。為了保證受試者在試驗過程中的安全,從以下兩方面進行考慮。(1)硬件上,在小臂和大臂的正面分別設置了錨點,使得大臂和小臂的運動夾角在安全范圍內。(2)軟件上,為電機的輸出扭矩設置了飽和函數,設置驅動器的模擬輸入電壓的閾值為3V(電機處于力矩模式下的額定扭矩對應的模擬電壓為5V),使套索的輸出拉力不超過100N,進一步保證了受試者的安全。
2.2試驗過程
飛行員在執行機動飛行或營救任務過程中,上肢常常需要承擔一定的負載。因此,在本次試驗中,受試者需要模擬飛行員的作業環境,進行負載訓練。為了驗證助力控制策略的助力效果,受試驗人員分別在有助力和無助力情況下彎舉2.5kg、5kg和7.5kg三種重量(質量)的杠鈴,即承擔輕度、中度和重度負載。每組試驗盡量以相同姿勢和相同速度進行。在不使用外骨骼的情況下,抬起和放下三組負載各一次。每組負載下,杠鈴被抬起和放下6~8次,同時記錄表面肌電信號值與關節估計扭矩值。在有外骨骼助力的情況下,重復上述操作。注意,每組運動結束后休息5min以消除肌肉疲勞。為了考察該系統在不同工作頻率下的助力效果,彎舉頻率被分別設置為1/12Hz、1/8Hz、1/6Hz、1/ 4Hz、1/2Hz,即完成一次抬起和放下杠鈴的動作所需的時間分別為12s、8s、6s、4s和2s。不同頻率下的訓練也符合飛行員不同的工作狀態,在每個頻率下分別驗證其助力效果。
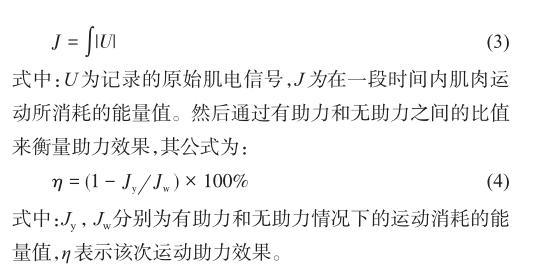
基于上述記錄的有助力和無助力情況下的肌電信號,可以對助力效果進行評價。本文使用肌電信號的積分值來衡量在一段時間內運動所消耗的能量,如式(3)所示:
2.3試驗結果和討論
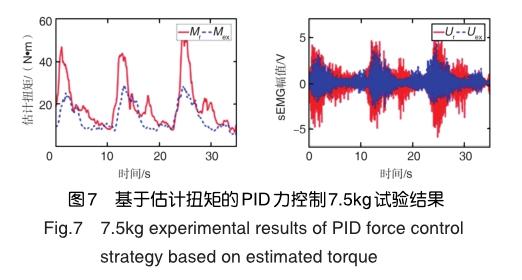
試驗結果如圖5~圖7所示。圖中表示的是1/12Hz頻率下不同負載條件的助力效果,其中Mex,Mr分別為有助力和無助力情況下的關節估計扭矩值。Uex,Ur分別為有助力和無助力情況下的原始肌電信號值。圖5~圖7分別展示了在輕度、中度和重度負載下關節估計扭矩的有助力和無助力對比圖。在這個面向飛行員肘關節助力的外骨骼系統中,在保證系統結構輕質柔軟、穿戴舒適美觀的同時,也要滿足驅動柔順安全、控制準確協調等人機共融協作需求。在關節估計扭矩的曲線上,局部有尖峰值,這是因為當外骨骼提供助力后,在相同負載下,受試者消耗的能量減小,關節估計扭矩變小,反過來又使得外骨骼提供的力變少。而當外骨骼助力變小后,關節估計扭矩又會增大。這個重復的過程導致了局部尖峰的出現,但局部尖峰的幅值都很小,結合試驗過程和結果可看出,該現象不影響外骨骼的整體助力效果。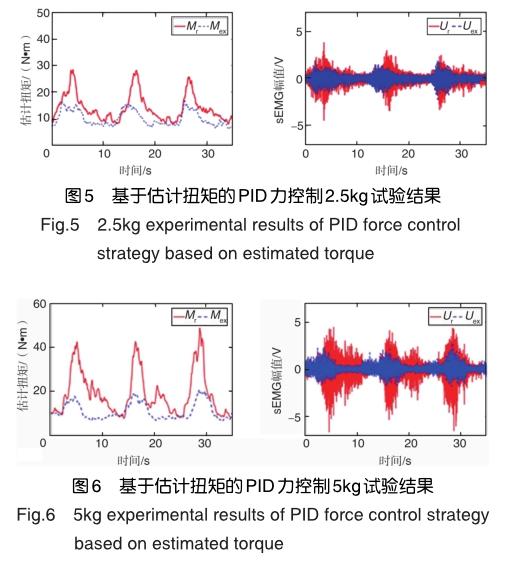
輕度、中度和重度負載下的助力效果見表1。工況為輕度負載的助力效果不如中度負載與重度負載條件下,其原因是在輕負載條件下,肱二頭肌消耗的能量不高,關節估計扭矩不大,外骨骼的助力也不大,使得助力效果不夠好。重度負載的助力效果又稍微低于中度負載,原因大致有兩個:一是伺服電機的輸出扭矩和速度被限制在一定范圍之內,影響了重度負載下的效果。在控制算法中,電機的輸出受到飽和函數的限制,其目的是為了保證外骨骼和人在交互過程中的安全性和舒適性。過大的輸出扭矩和速度都可能會對試驗者造成人身傷害。二是在重度負載下肌肉抖動程度大,導致估計扭矩變化大,與試驗扭矩誤差變大。試驗結果證明,在輕、中和重度負載下,該系統都能實現一定的助力效果,因此在航空航天應用領域中,該系統一方面能夠緩解飛行員長時間工作帶來的肌肉疲勞,另一方面還能增強彈射救生著陸后飛行員的自我營救能力。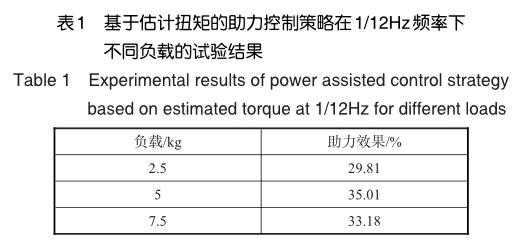
各個試驗頻率下的試驗數據見表2。由表2可知,隨著試驗頻率的提高,肌肉需要在短時間內進行多次伸縮,這導致肌肉異常活動的情況(抽搐、抖動)增加;此外,系統硬件的反應時間也縮短。上述兩個原因使得低頻條件下的助力的效果在總體上略好于高頻下的助力效果。
由試驗結果可知,本文提出的扭矩估計策略和控制方法在不同負載不同頻率下都有一定的助力效果,這驗證了系統能夠實現助力。雖然在不同頻率下的表現不盡如人意,但是基本符合飛行員執行任務時候的狀態,能夠減輕飛行員負擔,保證其安全。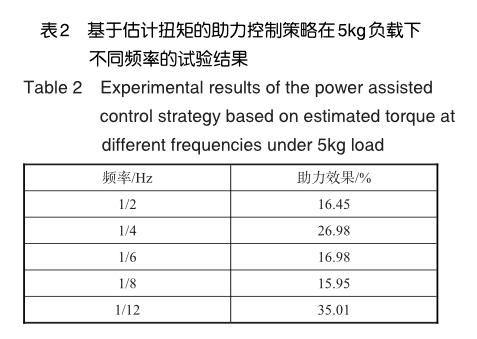
3結論
本文開發了一套面向航空防護救生領域的上肢外骨骼助力系統,闡述了關節扭矩估計算法,提出了助力控制策略,并通過試驗驗證了軟質外骨骼在不同工況下的助力效果。試驗結果表明,在本次搭建的試驗環境中,助力效果最佳時負載為5kg,頻率為1/12Hz。該外骨骼系統可穿戴在飛行員身上,可以準確快捷地識別飛行員的運動意圖并實現運動助力,減輕飛行員的負擔,增強飛行員的自救能力,保證飛行員的安全。
參考文獻
[1]姜濤,王煒,譚率,等.航空防護救生系統舒適性設計和標準現狀分析[J].航空標準化與質量, 2014 (3): 3-6. Jiang Tao,Wang Wei,Tan Shuai,et al. Comfort design and standard status analysis of aviation protection and life-saving system[J]. Aviation Standardization and Quality, 2014 (3): 3-6.(in Chinese)
[2]韓夢珍.國外航空救生技術現狀及展望[J].航空科學技術, 2003(2):23-25. Han Mengzhen. The present situation and prospect of aviation lifesaving technology abroad[J]. Aeronautical Science & Technology, 2003(2):23-25. (in Chinese)
[3]劉峰.航空個體防護技術與裝備[M].北京:科學出版社, 2008. Liu Feng. Aviation individual protection technology and equipment[M]. Beijing: Science Press, 2008. (in Chinese)
[4]余書山,周方.裝備自動化:海上彈射救生成功的關鍵[J].航空科學技術,2005(3):27-30. Yu Shushan, Zhou Fang. Equipment automation:the key to the success of sea ejection rescue[J]. Aeronautical Science & Technology, 2005(3): 27-30. (in Chinese)
[5]Asbeck A T,Kai S,Walsh C J. Soft exosuit for hip assistance[J]. RobotAuton System,2014,73:102-110.
[6]Ye D,Kim M,Kuindersma S S,et al. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking[J]. Science Robotics,2018,15(3):1-8.
[7]Stirling L,Yu C H,Miller J,et al. Applicability of shape memory alloy wire for an active,soft orthotic[J]. Journal of Materials Engineering & Performance,2011,20(4):658-662.
[8]楊金江.助力型下肢外骨骼機器人多信號融合感知系統研究[D].杭州:浙江大學, 2017. Yang Jinjiang. Study on multi-signal fusion perception system of the lower extremity exoskeleton robot[D]. Hangzhou: Zhejiang University, 2017. (in Chinese)
[9]Li Z,Wang B,Sun F,et al. sEMG-based joint force control for an upper-limb power-assist exoskeleton robot[J]. IEEE Journal of biomedical and health informatics, 2014,18(3):1043-1050.
[10]Potvin J R,Brown S H M. Less is more:high pass filtering,to remove up to 99% of the surface EMG signal power,improves EMG-based biceps brachii muscle force estimates[J]. Journal of Electromyography and Kinesiology,2004,14(3):389-399.(責任編輯王為)
作者簡介
徐大文(1995-)男,碩士研究生。主要研究方向:智能機器人技術、先進醫療器械。
Tel:19852830079
E-mail:xudawen@nuaa.edu.cn
吳青聰(1988-)男,博士,講師。主要研究方向:機器人動力學及其控制、康復機器人、先進醫療器械等。
Tel:15850608592
E-mail:wuqc@nuaa.edu.cn
陸龍海(1993-)男,碩士研究生。主要研究方向:康復器械、智能機器人。
E-mail:lu_longhai@foxmail.com
Research on Assistance Control Strategy of Soft Exoskeleton for Aviation Protection and Lifesaving
Xu Dawen,Wu Qingcong*,Lu Longhai
Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
Abstract: A wearable soft exoskeleton system for aviation protection and lifesaving was designed in this paper, which includes soft exoskeleton suit, data acquisition system, sensing detection module and control module. A powerassisted control strategy based on joint torque estimation was proposed to drive the system, which includes the acquisition, filtering and nonlinear mapping of sEMG signals. Finally, the experiments were conducted to verify that this system can save power effect under light, medium and heavy loads, which can meet the requirements of aviation protection and lifesaving system to reduce muscle fatigue of pilots, enhance their natural operation ability, and ensure the safety of pilots.
Key Words: wearable soft exoskeleton; aviation protection and lifesaving; joint torque estimation; assistance control strategy
