兩輪自平衡小車的設計及實現
2020-02-03 02:38:14叢玉華吳洪佳朱惠娟朱嫻謝玲
電子技術與軟件工程 2020年19期
叢玉華 吳洪佳 朱惠娟 朱嫻 謝玲
(南京理工大學紫金學院 江蘇省南京市 210023)
1 引言
《嵌入式控制系統》課程,是很多高校自動化專業的專業核心課程,是一門多學科交叉領域的課程,課程教學目標是使學生了解嵌入式控制系統的基本知識和原理,掌握嵌入式控制系統的接口開發技術和系統設計流程與方法,掌握嵌入式控制系統的軟件設計技術等。課程以基于嵌入式計算機的自動控制系統為載體,一方面介紹這類系統的設計原理與方法,另一方面講述如何將自動控制理論應用于實際的自動控制系統,是專業基礎理論與實際工程設計的接口課程,是一門兼顧理論與應用技術、實踐性較強的課程。兩輪自平衡小車為移動機器人的一種,為自動控制理論和嵌入式技術結合的有機載體,采用它作為嵌入式控制系統課程的綜合實驗平臺,有助于提高學生的理論聯系實際的能力和系統開發設計的能力。下面將介紹兩輪自平衡小車實驗平臺的設計和實現。
2 系統總體設計
兩輪自平衡小車,作為自動控制系統綜合實驗開發平臺,主要服務于三方面:
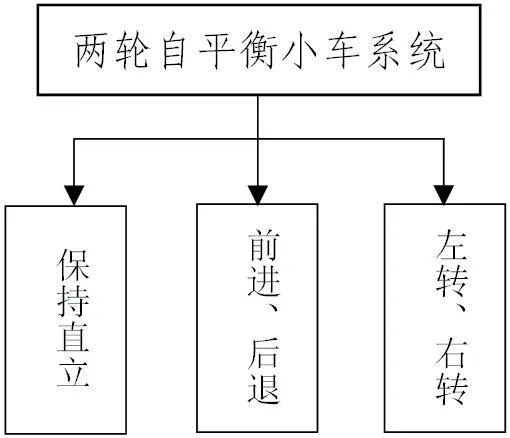
圖1:系統總體功能圖
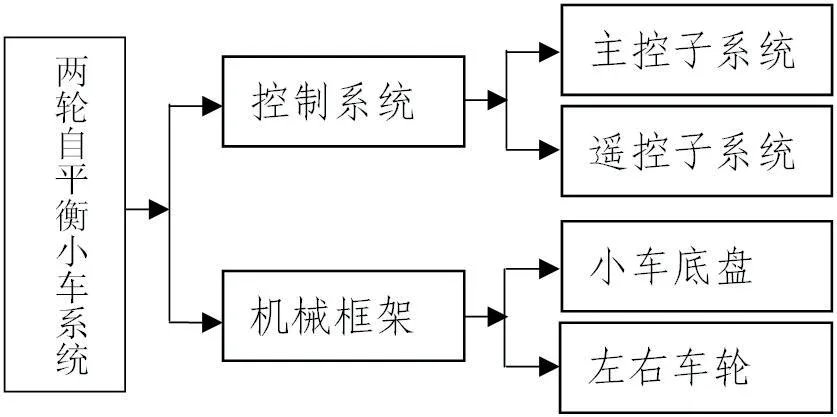
圖2:系統總體結構圖
(1)自動控制基礎理論,考察學生對開環控制、閉環控制、系統性能、PID 控制方法等的理解和掌握;
(2)嵌入式控制技術,鍛煉學生對嵌入式控制系統的硬件及接口設計能力和硬件基礎上的軟件編程能力;
(3)系統開發思路,加深學生對系統工程開發流程的理解,提升學生系統開發能力。為此,實驗平臺總體的功能和結構設計如下。
2.1 系統功能分析
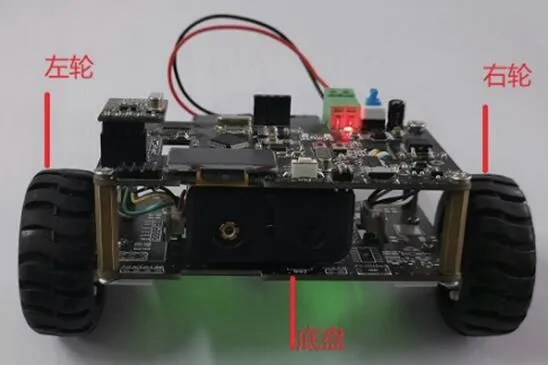
圖3:機械框架圖
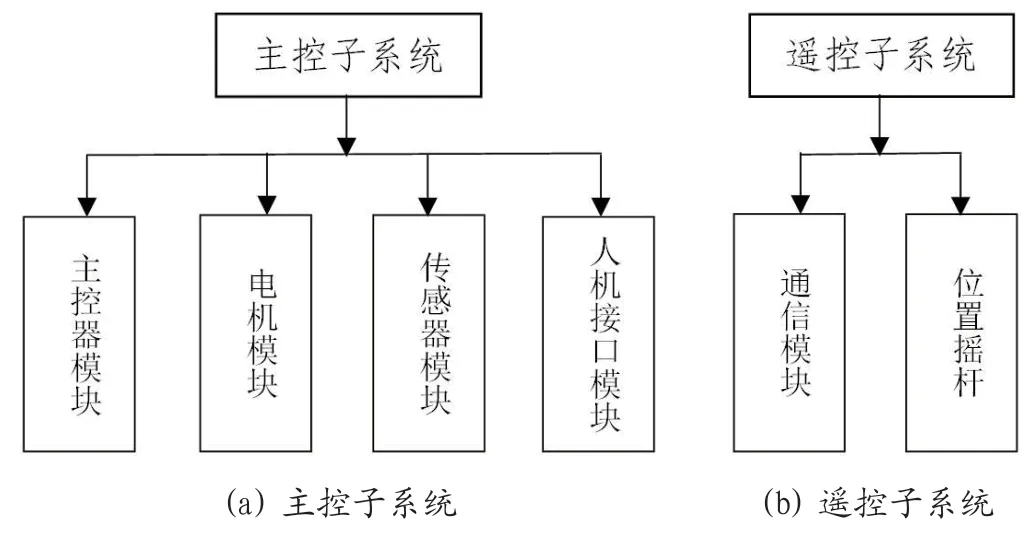
圖4:主控子系統構成圖
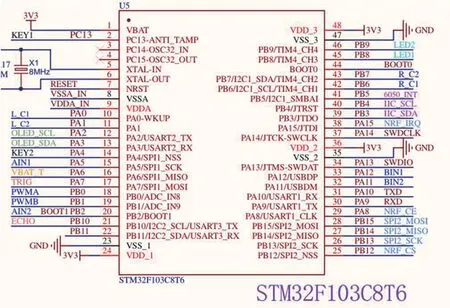
圖5:主控器總體接口設計圖
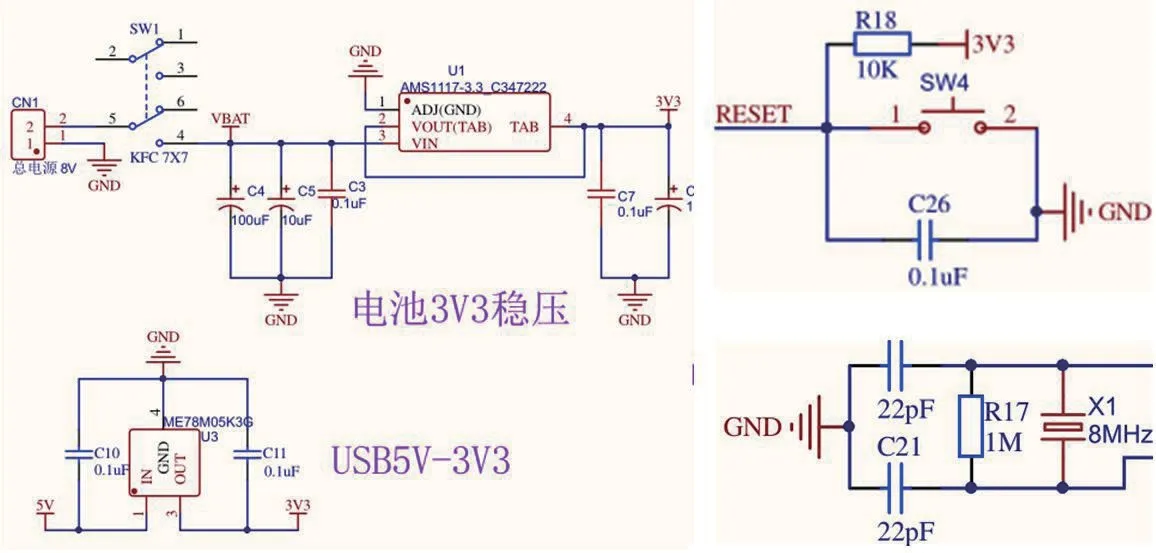
圖6:最小系統電路圖
對兩輪自平衡小車系統最基本的要求是空閑時能保持直立,有任務時須實現前進、后退、左轉和右轉,所用動作都基于對小車車輪的控制。為此,要實現兩輪自平衡小車的基本控制,需要系統具備功能如圖1所示。
2.2 系統結構設計
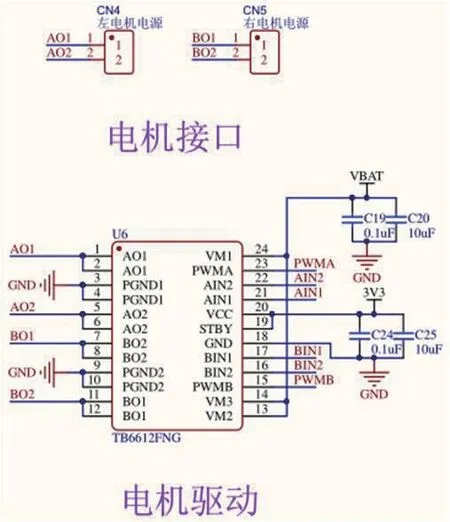
圖7:電機驅動模塊電路及接口圖
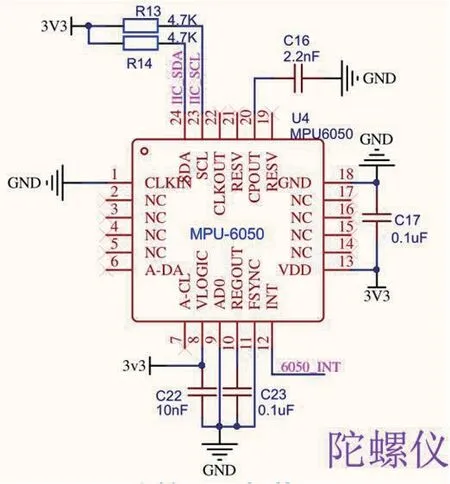
圖8:姿態傳感器電路及接口圖
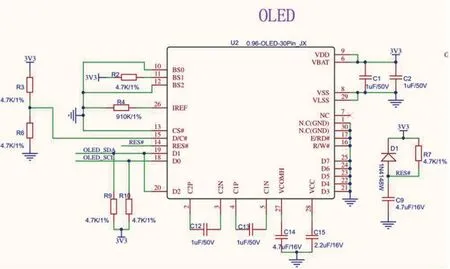
圖9:OLED 的電路及接口圖
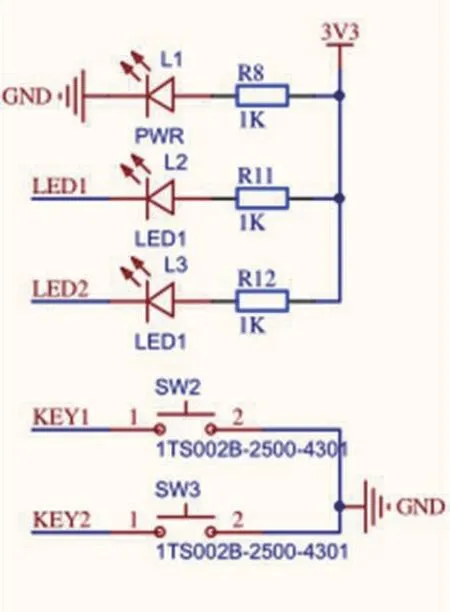
圖10:按鍵/LED 電路及接口圖
為實現上述功能,兩輪自平衡小車系統結構應包括:機械框架和控制系統,其中機械框架主要由小車底盤和左右車輪構成,控制系統又包含主控子系統和遙控子系統。具體結構如圖2所示。
3 硬件平臺設計
3.1 機械框架
兩輪自平衡小車機械框架由小車底盤和左右車輪構成,如圖3所示。
3.2 控制系統
控制系統由主控子系統和遙控子系統兩部分構成。
3.2.1 主控子系統
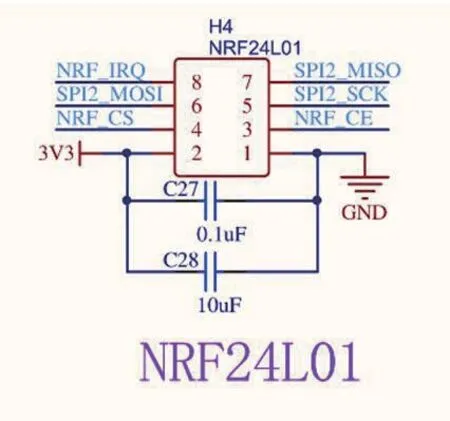
圖11:無線模塊電路及接口圖
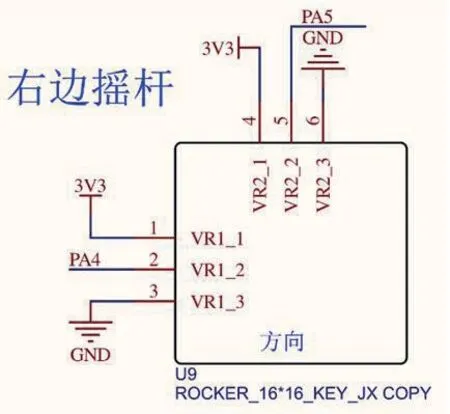
圖12:遙控器的搖桿電路及接口圖
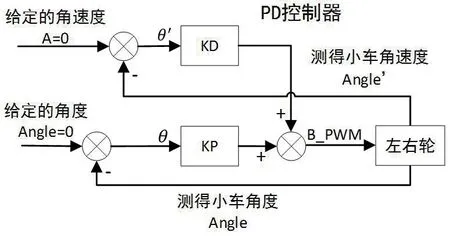
圖13:直立控制結構框圖
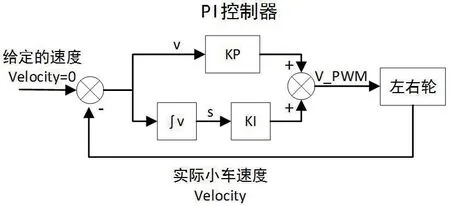
圖14:速度控制原理框圖
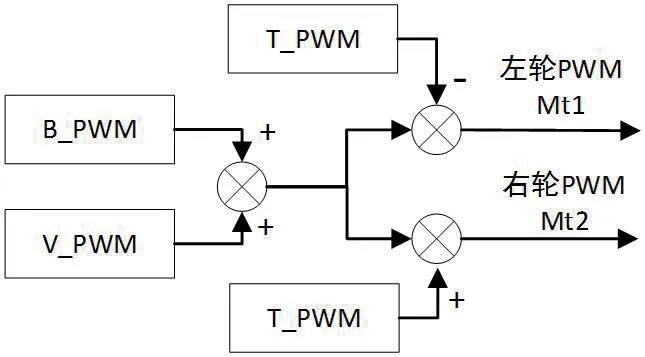
圖15:轉向控制原理框圖
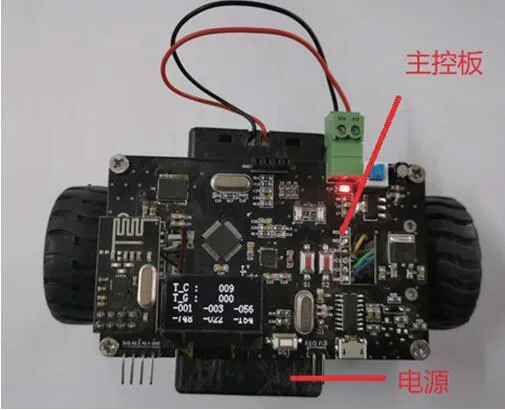
圖16:系統整體實物圖
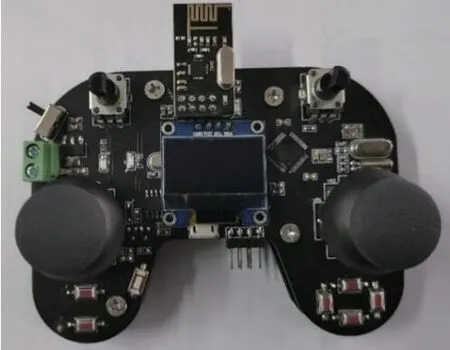
圖17:遙控器實物圖
主控子系統含主控器模塊、電機模塊、傳感器模塊、人機接口模塊;如圖4(a)所示。
3.2.1.1 主控器模塊
(1)主控器。主控器采用STM32F103C8T6 芯片,該芯片是基于ARM Cortex-M3 內核的STM32 系列32 位的微控制器,程序存儲器容量是64KB,系統頻率為72MHz,具有48 個引腳,輸入輸出引腳為37 個。圖5 為總體接口設計圖。
(2)最小系統。以主控器為核心構成的最小系統,外圍電路由電源電路、復位電路、振蕩電路組成。電源電路:采用LDO對電池或USB 進行降壓穩壓后產生3.3V 電壓供電,電池端采用AMS1117-3.3 穩壓芯片,USB 端采用ME78M05K3G 穩壓芯片。復位電路:采用低電平復位,共兩種復位方式,上電復位、手動復位。振蕩電路:該電路由晶振、起振電容及反饋電阻構成。晶振選擇8MHZ,起振電容選用22pF,反饋電阻選擇1MΩ,與主控器XTAL_IN 和XTAL_OUT 連接。圖6 為最小系統電路圖。
3.2.1.2 電機模塊
(1)直流電機。系統使用了帶編碼器的型號為GM12-N20VA的減速電機,在6V 供電下額定轉速約300 轉/分,自帶的霍爾傳感器可獲取電機實時轉速。
(2)電機驅動。電機驅動模塊選擇TB6612FNG。有4 種控制模式:正轉/反轉/制動/停止;PWM 支持頻率高達100 kHz。圖7 為電機驅動模塊接口圖,電機控制端與PB2,PA5,PA12,PA11相連,PWM 輸出引腳與PB0,PB1 相連。
3.2.1.3 傳感器模塊
(1)姿態傳感器。采用MPU-6050 模塊,內部整合了3 軸陀螺儀和3 軸加速度計測量小車姿態,可測俯仰角、橫滾角和偏航角及其角速度,采用三個16 位ADC 進行模數轉換,通過主IIC 接口與MCU 通信。采用傳感器自帶的DMP 數字運動處理器實現姿態解算。圖8 為姿態傳感器電路及接口圖,MOPU6050 通過PB3,PB4,PB5 與STM32 相連。
(2)霍爾傳感器。電機帶有霍爾編碼器引出AB 兩相,STM32 的定時器有編碼器模式,特定的GPIO 口可以直接連接電機上的編碼器接口,讀取脈沖獲得速度值。霍爾傳感器,左右編碼器引腳與PA0,PA1,PB6,PB7 相連。
3.2.1.4 人機接口模塊
OLED 顯示屏:采用分辨率是128×64 的0.96 寸OLED,通過IIC 總線與STM32 主控器通信,實時顯示小車的狀態,圖9 為其電路及接口圖。按鍵及LED:按鍵及LED 用于狀態顯示,其電路及接口如圖10所示。
3.2.2 遙控子系統
遙控子系統包括:通信模塊和位置搖桿。具體構成如圖4(b)所示。
(1)通信模塊。無線通信模塊采用nRF24L01,工作在2.4GHz~2.5GHz 頻段。通過SPI 接口對輸出功率頻道選擇和協議進行設置。圖11 為其電路及接口圖,通過SPI2 總線與主控器連接。
(2)位置搖桿。搖桿采用360°可轉動搖桿,通過兩個方向的電位器阻值變化確定搖桿當前位置,STM32 通過ADC 采集兩個方向電壓值計算位置,輸出控制信號車。圖12 為其電路及接口圖,STM32 的PA4,PA5 引腳進行ADC 數據讀取。
4 程序設計
4.1 直立環控制
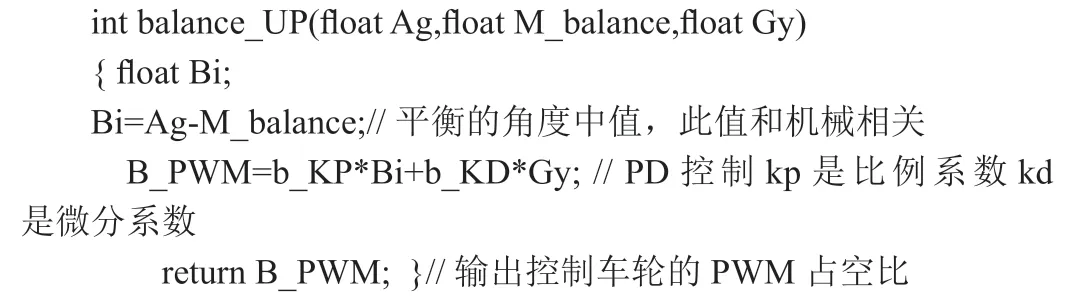
4.1.1 原理分析平衡小車在重力作用下,受到和角度成正比運動方向相反的回復力,空氣中運動受到空氣的阻尼力。為了讓小車靜止在平衡位置附近,不僅需要在電機上施加和傾角成正比的回復力,還需要增加和角速度成正比的阻尼力,阻尼力與運動方向相反。小車的平衡控制算法為:
a=kp*θ+kd*θ'
其中,θ 是俯仰角偏差,θ'是俯仰角速度偏差。只要測量平衡小車的俯仰角和俯仰角速度,據此通過PD 調節來輸出小車的控制量a,就可以完成小車的直立控制。其中kp 為比例系數,kd 為微分系數。以上的輸出控制量,直接關聯施加在電機上面的電壓,通過調節控制電機PWM 的占空比即可。圖13 為直立控制結構框圖。
4.1.2 程序實現
4.2 速度控制
4.2.1 原理分析
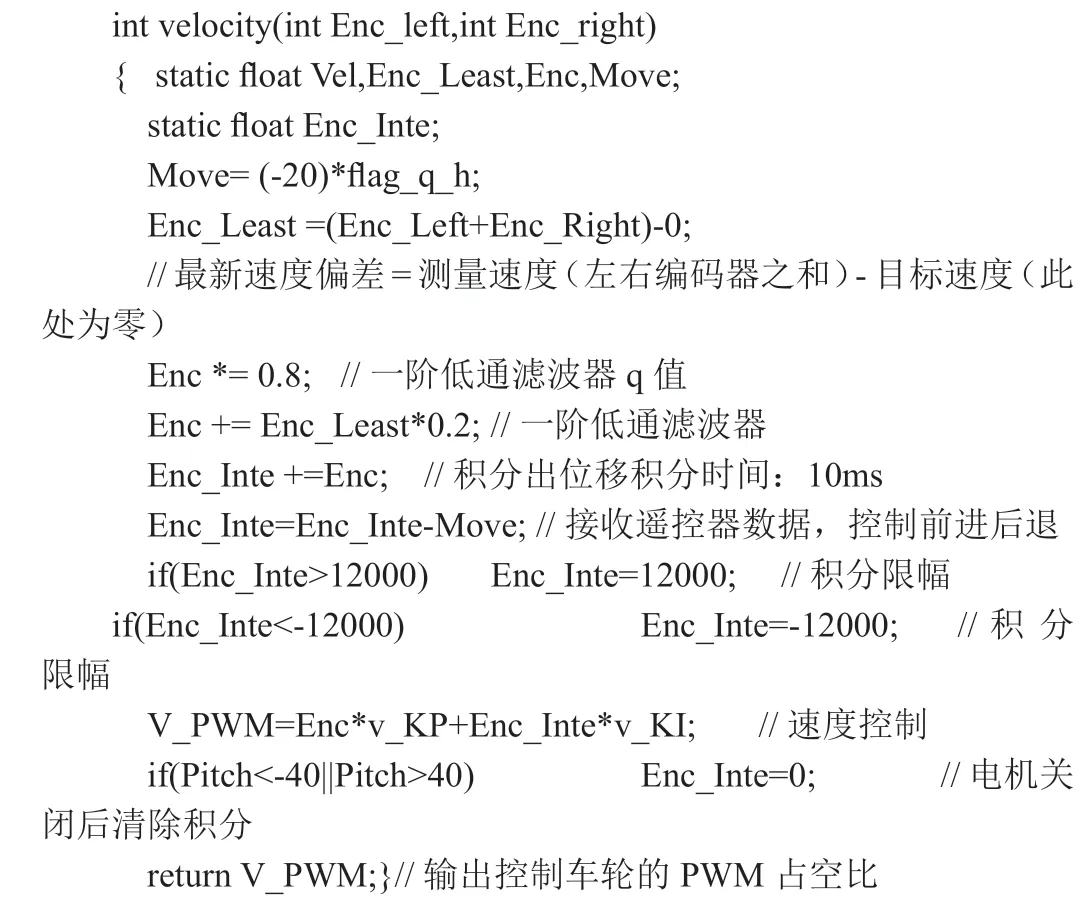
當小車以一定的速度運行時,要讓小車停下來,需要給小車施加更快的速度去平衡,是一個正反饋的效果。編碼器可能存在的噪聲,為防止噪聲被放大并消除系統靜差,速度控制使用PI 控制。小車的速度平衡控制算法為:
a1= kp*e(k)+ki*∑e(k)
e(k)是速度控制偏差,∑e(k)是速度控制偏差的積分。速度控制偏差為:測量值-目標值,為減緩速度值變化,防止速度控制對直立造成干擾,對速度值進行一階低通濾波。用軟件實現硬件RC濾波器效果,以抑制干擾信號。一階低通數字濾波原理為:
Yn= qXn+(1-q)Yn-1
式中q 為數字濾波器的時間常數,此處q=0.8,采樣周期為10ms。Xn為第n 次采樣時的濾波器輸入,Yn為第n 次采樣時濾波器輸出。速度控制原理框圖如圖14所示。
4.2.2 程序實現
4.3 轉向控制
4.3.1 原理分析
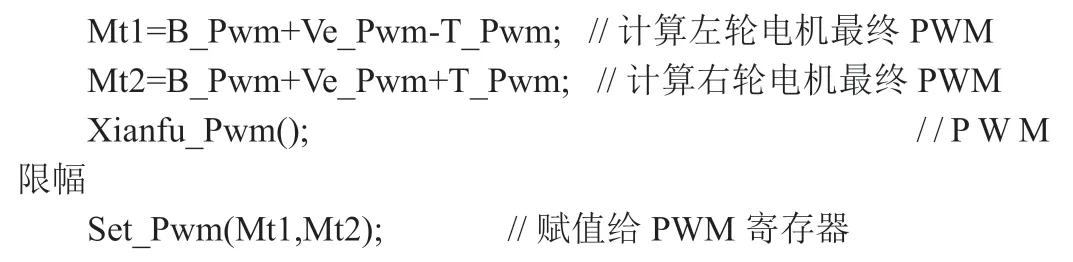
STM32 輸出給電機用于控制其姿態的PWM 應為小車的直立環B_PWM 與速度環V_PWM 之和,如果有遙控左右則應該疊加相應的轉向環的T_PWM分別控制左右電機。轉向控制原理如圖15所示。
4.3.2 程序實現
4.4 遙控設計
4.4.1 原理分析
通過STM32 的ADC 功能讀取搖桿電位值,獲得搖桿位置,通過無線模塊與小車通信,控制小車的前進后退以及左轉右轉。前后和左右兩個通道數值范圍為0-20,中間值為10。
4.4.2 程序實現
5 測試與總結
5.1 功能測試
兩輪自平衡小車集成后如圖16,圖17 為遙控器。測試情況為,自平衡控制:直立環,機械中值取0,KP= -280,KD= -0.4;速度環,KP = -70;KI = -0.35;取得較好的自平衡效果。轉向控制:將遙控器發來數據乘以20 以,加入左右輪的PWM 中,取得較好轉向效果。
5.2 總結
兩輪自平衡小車系統,作為《嵌入式控制系統》課程綜合實驗平臺,可以滿足學生對自動控制原理基礎知識的理解與應用,鍛煉學生嵌入式開發技術和軟硬結合的系統開發方法,因系統目前僅實現了自平衡小車的基本控制功能,后續可在此基礎上拓展循跡、避障、追蹤等功能,也可加入模糊控制、自適應控制等不同的控制算法優化控制效果,加深控制理論的學習和應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32
