一種二次雷達(dá)數(shù)據(jù)處理中目標(biāo)方位修正的方法
2020-02-03 02:38:06巫文俊陳偉鄒亮
電子技術(shù)與軟件工程 2020年19期
巫文俊 陳偉 鄒亮
(四川九洲空管科技有限責(zé)任公司 四川省綿陽(yáng)市 621000)
針對(duì)單脈沖二次雷達(dá),測(cè)角是利用主波束駐留時(shí)間內(nèi)和/差波束先確定每一個(gè)接收到應(yīng)答脈沖的方位,并對(duì)其進(jìn)行處理,再對(duì)所有應(yīng)答脈沖的方位進(jìn)行方位凝聚。如果應(yīng)答脈沖受到干擾,將會(huì)影響目標(biāo)方位的準(zhǔn)確性,從而影響二次雷達(dá)的探測(cè)精度。
為了使脈沖受到干擾時(shí)以后依然能保證探測(cè)精度,本文提出一種二次雷達(dá)數(shù)據(jù)處理中目標(biāo)方位修正的方法,可以在方位凝聚時(shí),通過(guò)算法識(shí)別出當(dāng)前測(cè)角的置信度,通過(guò)后續(xù)的航跡處理對(duì)測(cè)角進(jìn)行修正,從而提高二次雷達(dá)的探測(cè)精度。
1 單脈沖二次雷達(dá)的測(cè)角原理
單脈沖測(cè)角是一種精確測(cè)試信號(hào)方位角的技術(shù),由一個(gè)應(yīng)答脈沖就可以確定目標(biāo)方位角,單脈沖測(cè)角名字由此得來(lái)。
單脈沖二次雷達(dá)測(cè)角通過(guò)對(duì)飛機(jī)的應(yīng)答脈沖進(jìn)行和差通道處理后,得到脈沖的和幅度SumScop、差幅度DeltaScop,從而計(jì)算出此次目標(biāo)偏離掃描主軸信息(OBA):
oba=SumScop-DeltaScop
通過(guò)和的相位差,可以得到目標(biāo)偏離掃描準(zhǔn)軸的符號(hào)信息(Sign),掃描準(zhǔn)軸方位信息(Acp)由方位編碼器給出.綜合以上信息,可以解算出此次應(yīng)答脈沖的方位信息。
二次雷達(dá)詢問(wèn)主波束掃過(guò)飛機(jī)時(shí),飛機(jī)會(huì)產(chǎn)生一系列應(yīng)答脈沖,如圖1所示,從而會(huì)得到一組飛機(jī)的方位值ω1、ω2...ωn,最終飛機(jī)的方位值為:
測(cè)角對(duì)二次雷達(dá)探測(cè)性能的影響:
二次雷達(dá)數(shù)據(jù)處理主要分為點(diǎn)跡凝聚和航跡處理,點(diǎn)跡凝聚只對(duì)當(dāng)前周期的應(yīng)答信號(hào)進(jìn)行處理,當(dāng)應(yīng)答信號(hào)受到干擾時(shí),直接影響最后點(diǎn)跡的方位精度。航跡處理包括航跡建立、航跡更新、航跡外推、航跡濾波以及航跡平滑,其中航跡濾波會(huì)根據(jù)歷史周期的方位信息,與當(dāng)前周期的點(diǎn)跡測(cè)量方位進(jìn)行加權(quán)處理,得到最終的航跡方位信息。假設(shè)航跡濾波使用α-β 濾波,飛機(jī)做勻速直線飛行,當(dāng)測(cè)角發(fā)生偏差θ 時(shí),經(jīng)過(guò)航跡濾波后,探測(cè)的方位精度偏差為:

其中ω 為飛機(jī)真實(shí)方位
2 一種二次雷達(dá)數(shù)據(jù)處理中目標(biāo)方位修正的方法
本文所提出的修正方法包含以下3 個(gè)步驟:
2.1 完成原始應(yīng)答信號(hào)的采集
每個(gè)應(yīng)答脈沖經(jīng)過(guò)和差通道處理,得到脈沖的和幅度、差幅度以及符號(hào)位,并存儲(chǔ)在和幅度數(shù)組SumScop[n]、差幅度數(shù)組DeltaScop[n]以及對(duì)應(yīng)的符號(hào)位數(shù)組Sign[n],同時(shí)記錄對(duì)應(yīng)的轉(zhuǎn)臺(tái)方位Acp[n],數(shù)組下標(biāo)對(duì)應(yīng)每一次應(yīng)答。
2.2 完成應(yīng)答信號(hào)質(zhì)量分析
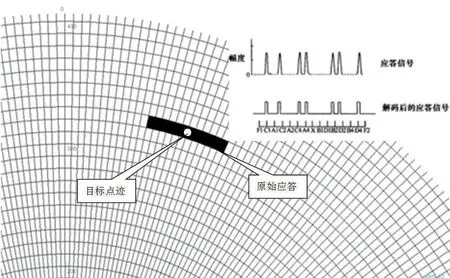
圖1:飛機(jī)應(yīng)答信號(hào)圖
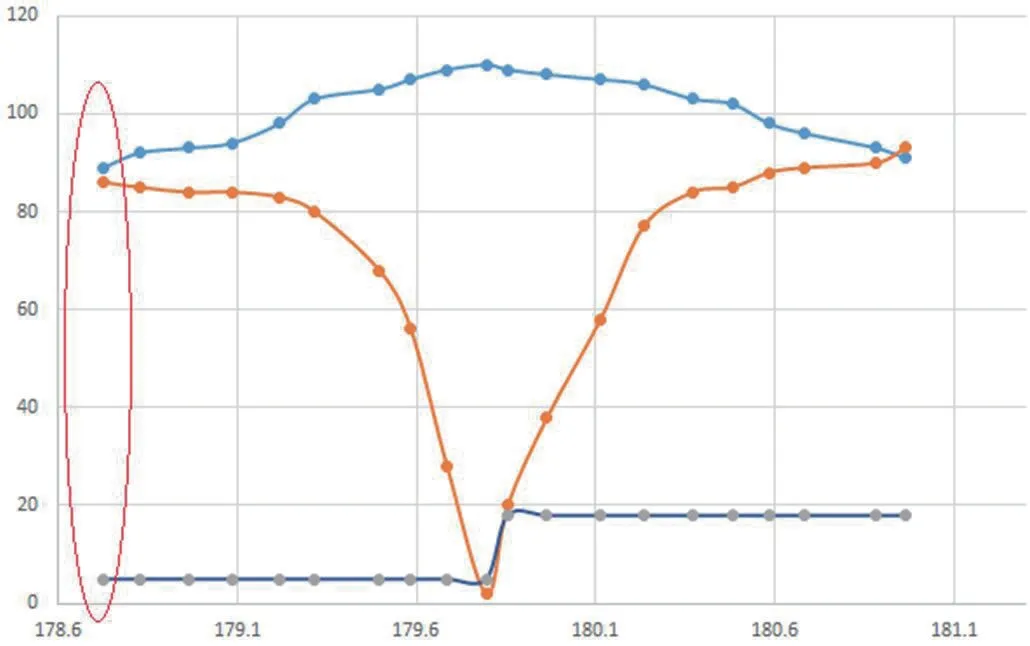
圖2:應(yīng)答信號(hào)和差幅度曲線圖
以轉(zhuǎn)臺(tái)方位Acp[n]為橫坐標(biāo)、和幅度數(shù)組SumScop[n]為縱坐標(biāo)得到應(yīng)答脈沖的和幅度曲線;
以轉(zhuǎn)臺(tái)方位Acp[n]為橫坐標(biāo)、差幅度數(shù)組DeltaScop[n]為縱坐標(biāo)得到應(yīng)答脈沖的和幅度曲線;
以轉(zhuǎn)臺(tái)方位Acp[n]為橫坐標(biāo)、符號(hào)位數(shù)組Sign[n]為縱坐標(biāo)得到應(yīng)答脈沖的符號(hào)位變化曲線;
正常應(yīng)答信號(hào)的和差幅度以及符號(hào)位曲線如圖2所示。
其中符號(hào)位曲線滿足如下規(guī)律:
(1)符號(hào)位在和幅度最大值、差幅度最小值處,發(fā)生翻轉(zhuǎn);
(2)符號(hào)位翻轉(zhuǎn)有且僅有一次翻轉(zhuǎn)。
和幅度曲線滿足如下規(guī)律:
有且僅有一個(gè)波峰,波峰左側(cè),呈單調(diào)遞增趨勢(shì),波峰右側(cè),呈單調(diào)遞減趨勢(shì)。
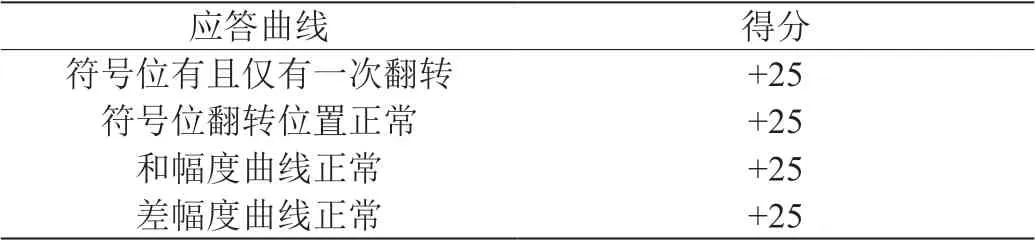
表1:點(diǎn)跡方位準(zhǔn)確度打分策略
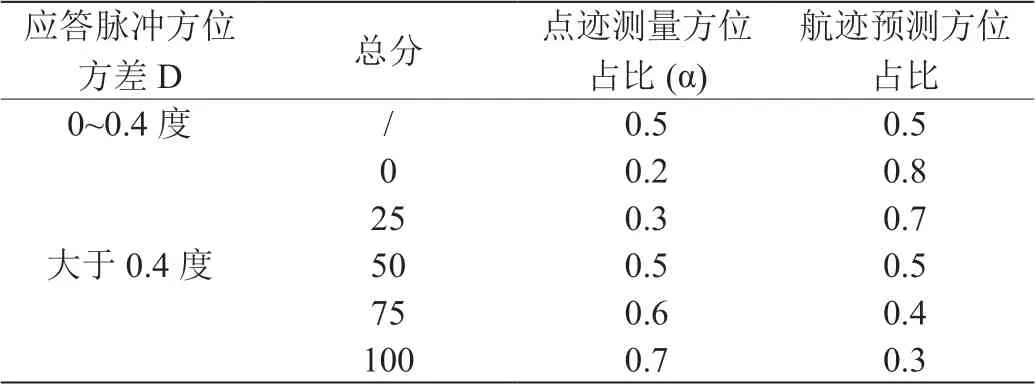
表2:分值與濾波系數(shù)的對(duì)應(yīng)關(guān)系表
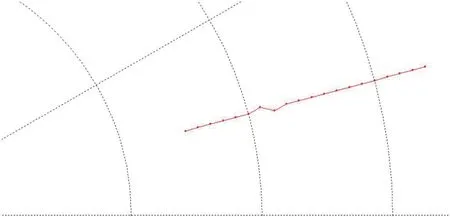
圖3:未進(jìn)行方位修正的航跡效果圖
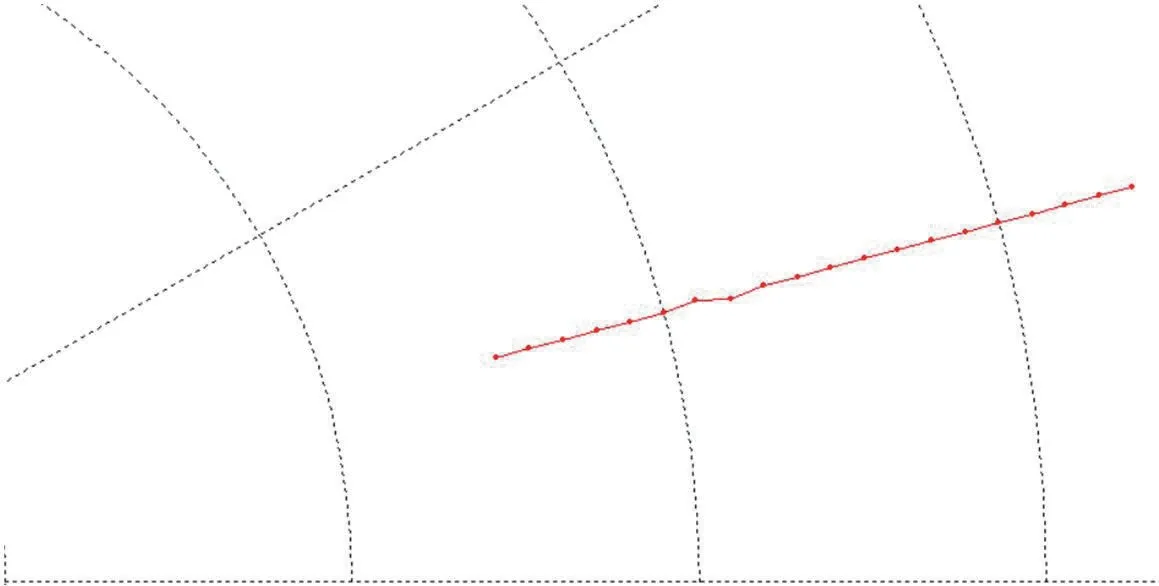
圖4:進(jìn)行方位修正后的航跡效果圖
差幅度曲線滿足如下規(guī)律:
有且僅有一個(gè)波谷,波谷左側(cè),呈單調(diào)遞減趨勢(shì),波谷右側(cè),呈單調(diào)遞增趨勢(shì)。
根據(jù)原始應(yīng)答脈沖的和差應(yīng)答方位ω1、ω2...ωn,點(diǎn)跡凝聚的方位為ω,因此可以得到應(yīng)答方位的方差為:

D 代表點(diǎn)跡原始應(yīng)答脈沖方位的離散程度,可以一定程度反應(yīng)最終點(diǎn)跡方位的準(zhǔn)確性。
通過(guò)對(duì)原始應(yīng)答脈沖群的符號(hào)位曲線、和幅度曲線、差幅度曲線進(jìn)行分析,在進(jìn)行點(diǎn)跡凝聚時(shí),對(duì)當(dāng)前周期的點(diǎn)跡方位的準(zhǔn)確度進(jìn)行打分,初始分值0 分,分?jǐn)?shù)越高,點(diǎn)跡方位的準(zhǔn)確度越高,滿分100 分。打分策略見(jiàn)表1。
2.3 完成目標(biāo)方位修正
根據(jù)步驟(2)中得到的點(diǎn)跡方位的分值以及點(diǎn)跡應(yīng)答脈沖群方位的方差D,實(shí)時(shí)調(diào)整航跡濾波時(shí)的濾波系數(shù)。分值與濾波系數(shù)的對(duì)應(yīng)關(guān)系見(jiàn)表。
航跡濾波后方位T 的計(jì)算方法為:

其中α 為點(diǎn)跡測(cè)量方位占比,ω 為點(diǎn)跡測(cè)量方位,T'為航跡預(yù)測(cè)方位。當(dāng)點(diǎn)跡應(yīng)答脈沖群方位的方差D 小于0.4 度時(shí),α 取固定系數(shù)0.5,即點(diǎn)跡測(cè)量方位和航跡預(yù)測(cè)方位權(quán)重相同;當(dāng)點(diǎn)跡應(yīng)答脈沖群方位的方差D 大于等于0.4 度時(shí)α 按表2 進(jìn)行取值。
3 方位修正方法的實(shí)現(xiàn)和效果分析
由于應(yīng)答脈沖在傳輸過(guò)程中可能會(huì)受到環(huán)境因素以及采樣的影響,導(dǎo)致單脈沖測(cè)角出現(xiàn)偏差,但是這種偏差是偶發(fā)性的,在二次雷達(dá)后端數(shù)據(jù)處理的航跡處理中,會(huì)對(duì)目標(biāo)角度進(jìn)行濾波處理,假設(shè)使用α-β 濾波進(jìn)行航跡濾波,一般情況下α 值為0.5,表示測(cè)量方位占比0.5,預(yù)測(cè)方位占比0.5。當(dāng)測(cè)角發(fā)生偏差時(shí),會(huì)導(dǎo)致最后的航跡精度出現(xiàn)偏差,航跡不平滑。如圖3所示。
按照本文提出的方法對(duì)目標(biāo)方位進(jìn)行修正后,形成的航跡精度有所提高,航跡平滑度提高。如圖4所示。
4 結(jié)論
現(xiàn)在的二次雷達(dá)普遍為單脈沖二次雷達(dá),單脈沖測(cè)角技術(shù)在二次雷達(dá)中應(yīng)用越來(lái)越廣泛,由于空域的環(huán)境復(fù)雜性,以及二次雷達(dá)前端信號(hào)處理采樣的誤差,可能會(huì)導(dǎo)致應(yīng)答脈沖受到干擾,將直接影響單脈沖二次雷達(dá)的測(cè)角精度。本文通過(guò)對(duì)應(yīng)答脈沖群的統(tǒng)計(jì)分析,推算出此次測(cè)角精度的準(zhǔn)確性,并根據(jù)信號(hào)處理后得到的和、差幅度以及符號(hào)位的變化趨勢(shì),對(duì)方位的準(zhǔn)確性進(jìn)行打分,同時(shí)通過(guò)計(jì)算原始應(yīng)答脈沖群方位的方差,一定程度上可以反應(yīng)應(yīng)答脈沖的信號(hào)質(zhì)量。后續(xù)航跡處理進(jìn)行航跡濾波時(shí),根據(jù)方位分值以及原始應(yīng)答脈沖群方位方差實(shí)時(shí)調(diào)整濾波系數(shù),再結(jié)合航跡當(dāng)前的運(yùn)動(dòng)趨勢(shì),對(duì)目標(biāo)航跡方位進(jìn)行了修正,相比于修正前的目標(biāo)方位,修正后的方位更加接近于目標(biāo)的真實(shí)方位。
根據(jù)分析比較,本文中的方位修正方法能一定程度修正目標(biāo)的方位值,改善目標(biāo)的態(tài)勢(shì)效果。此方法基于目標(biāo)歷史運(yùn)動(dòng)軌跡的準(zhǔn)確性,在測(cè)量方位發(fā)生偏差時(shí),使用預(yù)測(cè)方位修正測(cè)量方位,如果歷史方位存在較大誤差,將降低本方法的改善效果。因此要改善二次雷達(dá)的測(cè)角精度,還是要在雷達(dá)前端中降低信號(hào)噪聲,提高信號(hào)質(zhì)量。
