多視點(diǎn)的三維重建技術(shù)的研究及實(shí)現(xiàn)
2020-02-03 02:37:48王錦
電子技術(shù)與軟件工程 2020年19期
王錦
(廣州大學(xué)紡織服裝學(xué)院 廣東省廣州市 510165)
三維重建技術(shù)可以基于計(jì)算機(jī)的高處理性能,進(jìn)行有效實(shí)現(xiàn)。在虛擬現(xiàn)實(shí)三維動(dòng)畫當(dāng)中,其整體技術(shù)得到了顯著發(fā)展與應(yīng)用。如在macOS Big Sur 系統(tǒng)以及Windows10 系統(tǒng)當(dāng)中,其自身均內(nèi)置了虛擬現(xiàn)實(shí)仿真門戶,使用者可以通過(guò)此應(yīng)用程序,達(dá)成三維模型的構(gòu)建,實(shí)現(xiàn)全面提升。此外,在三維軟件當(dāng)中,利用3DMax、BIM(Building Information Modeling)等三維建模軟件可以實(shí)現(xiàn)有效的交互。在三維建模圖像處理當(dāng)中,計(jì)算機(jī)可以有效提取相應(yīng)建模的表面信息,建立有效的仿真模型,以便于各領(lǐng)域進(jìn)行有效連接。如,在進(jìn)行工程建設(shè)當(dāng)中,為了保證整體工程性的有效開展,可使用BIM 技術(shù)進(jìn)行構(gòu)建,通過(guò)計(jì)算機(jī)模擬相關(guān)的工程,實(shí)現(xiàn)整體的有效連接。
1 基于計(jì)算機(jī)自身的三維模型重建技術(shù)
對(duì)三維模型重建進(jìn)行分析,可以得知其以計(jì)算機(jī)視覺為主要研究方向,對(duì)自身的構(gòu)建可實(shí)現(xiàn)“單幅”或“多幅”圖像實(shí)現(xiàn)采集、拼接,有效構(gòu)建三維模型。在構(gòu)建方式當(dāng)中,其主要基于以下四大構(gòu)建模式[1]。
基于明暗的三維重建。此類方法可以根據(jù)單幅圖像完美恢復(fù)出整體物體的三維信息,但在成像過(guò)程當(dāng)中,由于其參考依據(jù)僅根據(jù)單幅圖像設(shè)定。因此,其整體深度信息呈現(xiàn)了一定的不足,對(duì)表面特性無(wú)法實(shí)現(xiàn)全面體現(xiàn),精準(zhǔn)度較低。在應(yīng)用范圍當(dāng)中,未能得到有效發(fā)展。
雙目立體視覺法。此種方法可通過(guò)計(jì)算機(jī)自身的核心,模擬出動(dòng)物以及人類的眼睛。在動(dòng)物以及人類眼睛的成像過(guò)程當(dāng)中,其具有一定的“間距性”。而計(jì)算機(jī)完美的模擬了此中“間距性”。在拍攝過(guò)程當(dāng)中,同時(shí)攝取場(chǎng)景圖像,根據(jù)光學(xué)三角原理,獲取物體表面三維坐標(biāo)。隨后轉(zhuǎn)換為相應(yīng)的數(shù)據(jù),在系統(tǒng)當(dāng)中,生成三維圖形,有效實(shí)現(xiàn)立體匹配[2]。
三目立體視覺以及多目立體視覺方法。作為先進(jìn)的三維構(gòu)件法,在三目立體視覺當(dāng)中,其可以采用計(jì)算機(jī)進(jìn)行自動(dòng)匹配,使匹配結(jié)果更具精準(zhǔn)性。在三目視覺匹配當(dāng)中,為了提升整體的匹配可靠性,必須減少相機(jī)之間的基線,保持自有精準(zhǔn)性。多目立體視覺方法當(dāng)中的“多目立體匹配”機(jī)制,可以對(duì)多度的重疊點(diǎn)進(jìn)行交匯,利用較多的冗雜數(shù)據(jù),有效解決其在建筑過(guò)程當(dāng)中的匹配問(wèn)題。合理有效的提升三維模型的精準(zhǔn)度,但其對(duì)其硬件設(shè)置以及相機(jī)的拍攝標(biāo)準(zhǔn)具有明顯要求。
基于運(yùn)動(dòng)系統(tǒng)的三維結(jié)構(gòu)重建。此種方式可以采用動(dòng)態(tài)追蹤,利用相機(jī)對(duì)相關(guān)圖像進(jìn)行拍攝,構(gòu)建有效的三維結(jié)構(gòu)圖形,在數(shù)字傳感器、微處理器等硬件的加持下,重新繪制三維結(jié)構(gòu),使整體的三維技術(shù)得到飛速發(fā)展。現(xiàn)如今,此技術(shù)已被廣泛應(yīng)用于工業(yè)、建筑、航空等領(lǐng)域。在整體的視覺系統(tǒng)當(dāng)中,根據(jù)相關(guān)的圖像信息,實(shí)時(shí)繪制三維場(chǎng)景,使整體項(xiàng)目明顯具備可用性。
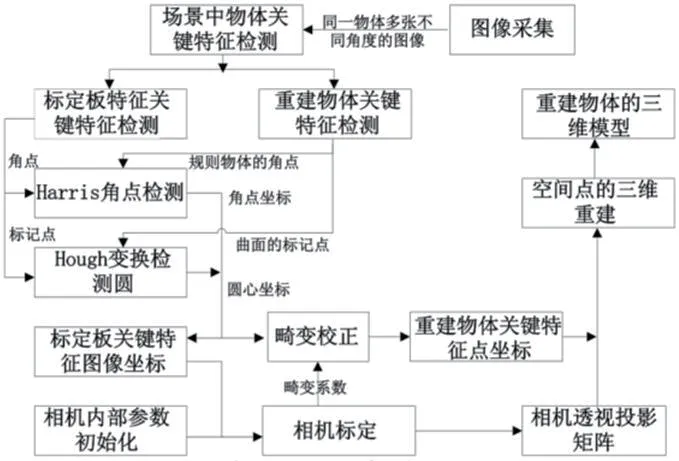
圖1:多視點(diǎn)三維重建相關(guān)結(jié)果
2 多視點(diǎn)重建算法的整體分析建立
在進(jìn)行三維重建當(dāng)中,在其特征檢測(cè)環(huán)節(jié),可對(duì)物體的特征(如物體自身的邊緣、輪廓等)等實(shí)現(xiàn)幾何構(gòu)件。通過(guò)像素特點(diǎn)進(jìn)行重組,有效提升三維重建的速度,在現(xiàn)有圖像當(dāng)中,計(jì)算機(jī)提取定位精準(zhǔn)的特征點(diǎn)。在重建過(guò)程當(dāng)中,有效達(dá)到其理想目標(biāo),在特征點(diǎn)、側(cè)重點(diǎn)檢測(cè)中,相機(jī)數(shù)據(jù)可有效提取整體坐標(biāo)系,將已知數(shù)據(jù)進(jìn)行全面整合,基于此類特點(diǎn),可直接影響到相機(jī)標(biāo)記以及物體重建的結(jié)果,實(shí)現(xiàn)全面精準(zhǔn)度[3]。
在圖像特征當(dāng)中,根據(jù)圖像的自由規(guī)則進(jìn)行設(shè)定,可以得知其自身在圖像透露形狀信息時(shí)具有明顯的吸收性。此外,“角點(diǎn)”是圖像非常重要的一個(gè)局部因素。“角點(diǎn)”具有“旋轉(zhuǎn)不變形”以及“不隨光照改變”等優(yōu)點(diǎn),在三維重建技術(shù)應(yīng)用當(dāng)中,可以“角點(diǎn)”為特征,進(jìn)行全面處理。有效減少參與計(jì)算的整體數(shù)據(jù)量,使整體圖像信息以“角點(diǎn)”為特征,進(jìn)行構(gòu)建,全面實(shí)現(xiàn)其自身價(jià)值。在構(gòu)建模式當(dāng)中,所有物體均具有明顯的特征點(diǎn),“角點(diǎn)”模型構(gòu)建需要在物體表面分布具有明顯特征識(shí)別的元素。作為標(biāo)記點(diǎn),常見的圖形有圓形、十字劃線等圖案,提升整體的提取可靠性,實(shí)現(xiàn)全自動(dòng)化操作。
3 多視點(diǎn)三維重建的相關(guān)實(shí)驗(yàn)結(jié)果
在多視點(diǎn)三維重建實(shí)驗(yàn)過(guò)程當(dāng)中,利用采集到的多幅場(chǎng)景圖像,可以對(duì)整體的模型進(jìn)行完美模擬[4]。在拍攝位置與姿態(tài)基礎(chǔ)當(dāng)中,實(shí)現(xiàn)有效的交互性,為其人機(jī)共融提供了有效的基礎(chǔ)。同時(shí),三維重建也可基于算法,對(duì)其特征點(diǎn)進(jìn)行有效獲取(如圖1所示)。
3.1 實(shí)現(xiàn)相關(guān)的基礎(chǔ)圖像采集工作
作為三維重建的重要步驟,圖像采集是其基本環(huán)節(jié)。如何得到理想的圖像,對(duì)三維重建模型的精準(zhǔn)度有直接聯(lián)系,因此,在采集過(guò)程當(dāng)中,其照明、相機(jī)質(zhì)量、傳感器等均對(duì)被測(cè)物體的基本特征精準(zhǔn)度具有直接關(guān)系。在實(shí)驗(yàn)過(guò)程當(dāng)中,針對(duì)重建物體自身的特征,可以在自然光照環(huán)境下,完美體現(xiàn)。使用日光燈為輔助照明工具,保證被測(cè)物體的重要特征,有效展現(xiàn)以重建物體為中心,在扇形區(qū)域內(nèi)對(duì)不同角度進(jìn)行有效采集[5]。
3.2 保障相關(guān)的信息特征點(diǎn)提取
在采集過(guò)程當(dāng)中,所有物體表面均包含了此物體的特征點(diǎn),對(duì)于三維重建技術(shù)而言,在構(gòu)建過(guò)程當(dāng)中,必須基于此的特點(diǎn)進(jìn)行完全設(shè)定。在自有輪廓邊緣當(dāng)中,采用Harris 檢測(cè)法進(jìn)行全面檢測(cè)。由于檢測(cè)過(guò)程當(dāng)中,基于其繪圖變化為焦點(diǎn)特征進(jìn)行測(cè)量,因此,為了驗(yàn)證整體算法的精準(zhǔn)性以及有效性,在實(shí)驗(yàn)場(chǎng)景當(dāng)中加入適量光照,實(shí)現(xiàn)全面特征體現(xiàn)。
3.3 相機(jī)標(biāo)定
在后續(xù)相機(jī)標(biāo)定當(dāng)中,可以得知其根據(jù)內(nèi)部數(shù)據(jù)參數(shù)以及外部數(shù)據(jù)參數(shù)進(jìn)行全面測(cè)量,設(shè)立相對(duì)應(yīng)的關(guān)系在整體的測(cè)量環(huán)節(jié)當(dāng)中,對(duì)于標(biāo)定板的選擇,可以根據(jù)事先的已知尺寸設(shè)定,標(biāo)定版使用具有相應(yīng)的優(yōu)點(diǎn)。首先,標(biāo)定板面自身的結(jié)構(gòu)比三維標(biāo)定物簡(jiǎn)單,在圖像投射過(guò)程當(dāng)中,整體選擇較為豐富,便于制作。此外,在運(yùn)營(yíng)過(guò)程當(dāng)中,方塊圖形在圖像模式當(dāng)中,易于提取,且焦點(diǎn)自身具有旋轉(zhuǎn)普遍性等優(yōu)點(diǎn)。采用方形圖案標(biāo)定版,可以保證三維重建技術(shù)的有效性,整體的圓形標(biāo)定可以按照相關(guān)的行列進(jìn)行排序,以便其相機(jī)標(biāo)點(diǎn)算法,基于坐標(biāo)點(diǎn)進(jìn)行換算[6]。
3.4 空間點(diǎn)的精準(zhǔn)三維構(gòu)建
在整體的構(gòu)建流程當(dāng)中,相機(jī)排列順序以相機(jī)CCD 設(shè)定,例如器“y”為“0”,在三維重建時(shí),以小孔成像為基準(zhǔn)模型進(jìn)行設(shè)定。但其相機(jī)的整體成像原則與小孔成像概念具有一定的差異性,整體鏡頭的復(fù)雜性與工藝水準(zhǔn)受時(shí)間因素影響,在后期成像系統(tǒng)當(dāng)中有可能會(huì)受到一定干擾。因此,其空間坐標(biāo)點(diǎn)可能與實(shí)際坐標(biāo)存在較大差異。
在后續(xù)的建設(shè)過(guò)程當(dāng)中,普通相機(jī)的圖像采集自身具有明確的不穩(wěn)定性因素。在重建過(guò)程當(dāng)中,有可能會(huì)出現(xiàn)誤差,因此,在采集多張圖像后,通過(guò)Tsai 兩步法,將相機(jī)標(biāo)定相應(yīng)物體的特征點(diǎn)進(jìn)行修正。由此可見,在后期的三維重建法當(dāng)中,整體實(shí)驗(yàn)具有明顯的可行性。在整體物體的成像當(dāng)中,實(shí)現(xiàn)進(jìn)一步推廣,利用誤差分析法,驗(yàn)證本文實(shí)驗(yàn)的有效性[7]。
4 三維重建技術(shù)的應(yīng)用展望
三維重建是一項(xiàng)非常龐大且復(fù)雜性的問(wèn)題,在整體的經(jīng)驗(yàn)積累探索當(dāng)中,必須基于此類特點(diǎn),實(shí)現(xiàn)全面融合,對(duì)專業(yè)領(lǐng)域進(jìn)行全面研究。首先,在“非歐氏空間三維重建”當(dāng)中,整體基于視覺歐氏圖集和發(fā)展。因此,具有一定的提升性。而曲面重建融合當(dāng)中,可以通過(guò)相應(yīng)物體的形狀,以“點(diǎn)”、“線”、“面”等基本元素進(jìn)行構(gòu)建。因此,全面重建同樣具有明顯的推廣性,曲面基元構(gòu)成的三維重建模型,可以有效規(guī)劃出完全整體[8]。
在我國(guó)未來(lái)的發(fā)展過(guò)程當(dāng)中,三維重建技術(shù)將應(yīng)我國(guó)各領(lǐng)域,實(shí)現(xiàn)有機(jī)融合,在醫(yī)療、建筑、教育等領(lǐng)域?qū)崿F(xiàn)全面應(yīng)用。例如,在醫(yī)療領(lǐng)域,三維重建技術(shù)可以通過(guò)掃描的形式,對(duì)患者的身體構(gòu)造進(jìn)行三維模擬,便于醫(yī)生對(duì)手術(shù)方案進(jìn)行全面設(shè)定。分析在手術(shù)過(guò)程當(dāng)中有可能會(huì)出現(xiàn)的相關(guān)風(fēng)險(xiǎn),提升整體的手術(shù)成功率。而在教學(xué)過(guò)程當(dāng)中,教師基于三維重建技術(shù),也可對(duì)學(xué)生進(jìn)行知識(shí)體系的規(guī)劃,保證學(xué)生通過(guò)合理有效的形式,對(duì)整體知識(shí)點(diǎn)進(jìn)行全面吸收。三維重建技術(shù)與計(jì)算機(jī)領(lǐng)域?yàn)楣采鸂顟B(tài),在一定程度上也提升了我國(guó)人才對(duì)于信息技術(shù)的掌握,對(duì)后續(xù)發(fā)展提供了全面的保障。對(duì)我國(guó)自有建設(shè)以及全方面的人才培養(yǎng)起到了一舉多得的培養(yǎng)效果以及吻合作用[9-10]。
5 結(jié)束語(yǔ)
綜上所述,在多視點(diǎn)的三維重建技術(shù)研究當(dāng)中,其整體雖然存在一定的問(wèn)題,如“成本偏高”、“靈活性”以及“適應(yīng)性”有待提升等問(wèn)題外。其自身對(duì)于物體特征重建實(shí)現(xiàn)了完美的應(yīng)用,三維重建是以一種可以實(shí)現(xiàn)廣泛應(yīng)用的技術(shù),其對(duì)于我國(guó)各領(lǐng)域均可實(shí)現(xiàn)有效融合。在“虛擬現(xiàn)實(shí)”、“三維動(dòng)畫”等領(lǐng)域當(dāng)中,實(shí)現(xiàn)了全面提升。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
