基于DSP技術的在線式UPS設計與研究
2020-02-02 09:14:12徐圣杰
通信電源技術 2020年20期
關鍵詞:檢測
徐圣杰
(雅安職業技術學院,四川 雅安 625000)
1 在線式UPS原理
在線式UPS工作原理如圖1所示。其中,EMI濾波器作為輸入濾波器使用,起到了兩方面的作用。一方面能夠濾除干擾,隔離市電,防止對UPS電路板的信號傳輸產生共模和差模干擾,另一方面防止UPS在逆變時產生的高頻開關信號產生諧波,干擾市電。在線式UPS的輸出功率始終由逆變器提供,由于UPS逆變器使用的是高頻開關,因此無論市電是否正常,切換時間都可忽略[1]。市電經AC-DC整流再后經DC-AC逆變為正弦電壓為負載供電,旁路電池由AC-DC轉換器充電,電源異常時由蓄電池供電,逆變器進行交直流轉換,將直流電轉換為正弦交流供電負載。如果逆變器發生故障,靜態開關將直接由市電供電[2]。
2 SVPWM調制算法分析
對于UPS逆變方式,簡單的正弦波SPWM不能保證電流和電壓在同一相位,控制效果比較一般,因此本文提出了SVPWM調制方式。空間矢量脈寬調制(Space Vector Pulse Width Modulation,SVPWM)是在交流電機變頻調速的基礎上發展而來的,通過改變PWM逆變器的不同開關狀態組合輸出波形近似正弦。與方波調制技術相比,SVPWM有許多優點,最為突出的優勢就是其占空比接近于1,運行起來更加平穩,且易實現數字化。
SVPWM通過對6個開關管進行適當的PWM控制,使3個分矢量合成1個大小不變的旋轉總矢量[3,4]。取開關函數為Sk,其表達式如下:

為便于分析,建立如圖2所示的坐標系圖,其合成空間矢量為:

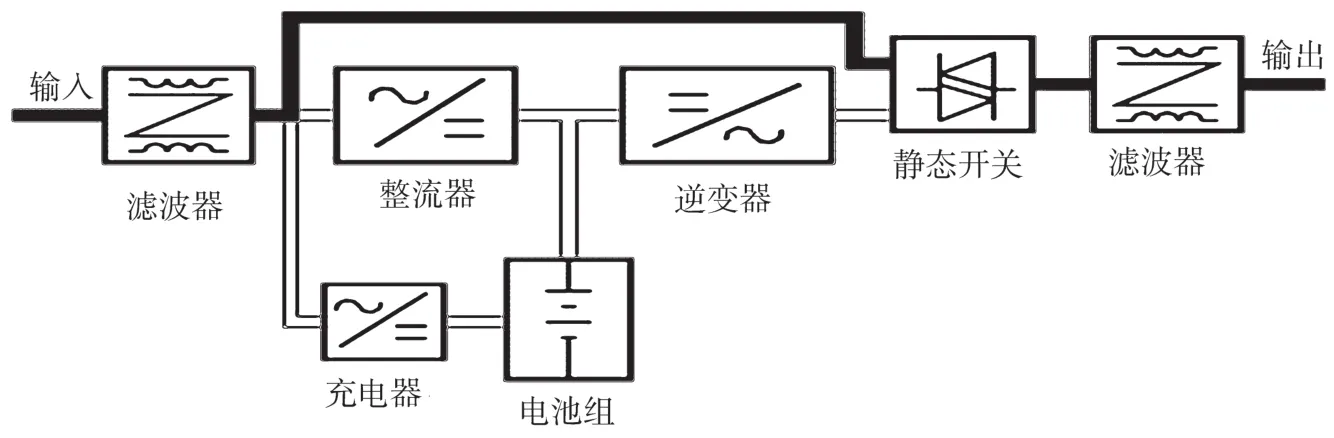
圖1 在線式UPS工作原理圖
式中,定子三相電壓ua、ub、uc與開關函數Sk的關系為:

式中,UDC為SVPWM逆變器輸出的線電壓峰值。
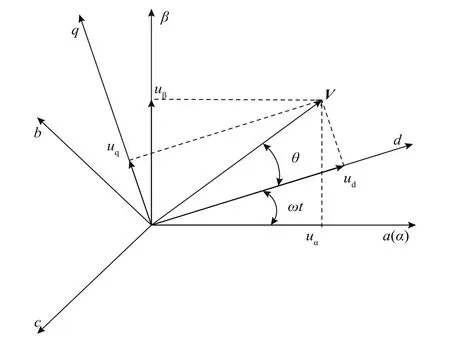
圖2 合成矢量與各坐標系之間的關系示意圖
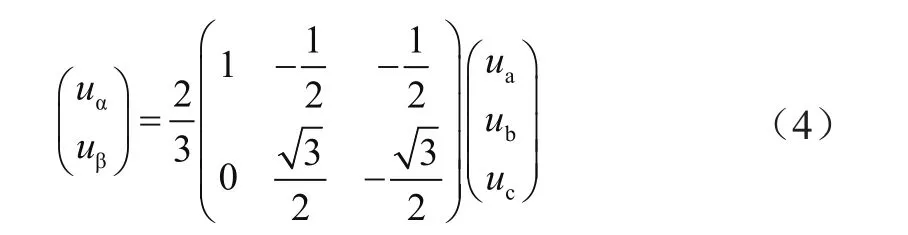
根據開關函數Sk的取值不同,6個開關管可以產生8種不同的狀態組合,分別對應8個空間矢量。SVPWM技術在進行扇區判斷時,需要用到合成的電壓矢量在α軸和β軸上的投影uα和uβ,根據Clarke變換可得:
求取其投影,可得不同的開關組合與電壓矢量的投影分量,8種開關狀態下的矢量及其分量的對應關系如表1所示。
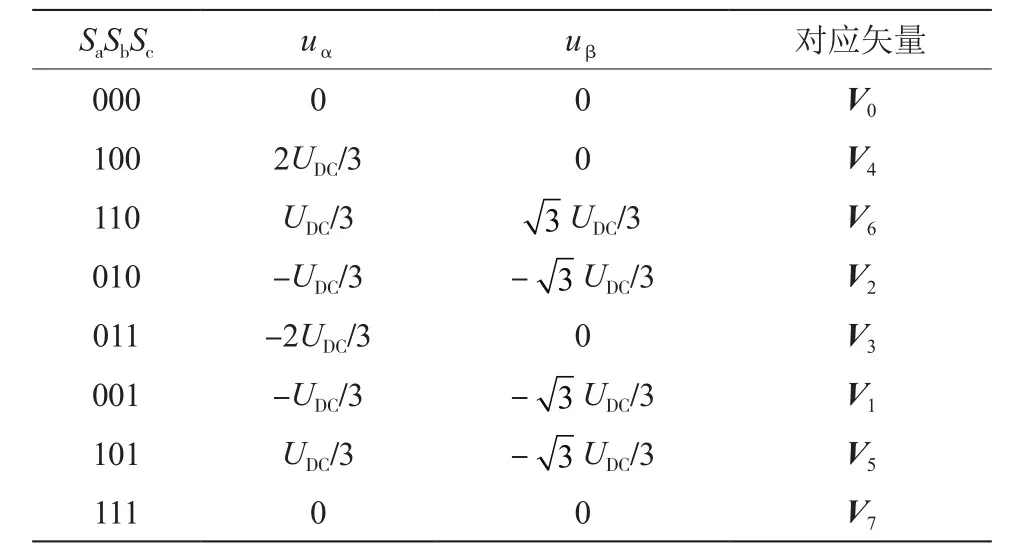
表1 8種開關狀態下的矢量及其分量
由式(4)和表1可知,矢量V1~V6為6個不為零的開關向量,輸出線電壓峰值相等,均為:

V0和V7都是零矢量,電壓矢量空間由6個非零開關矢量劃分為6個扇區。電壓矢量空間的分布用圖形表示如圖3所示,零向量V0和V7位于扇區的中心。
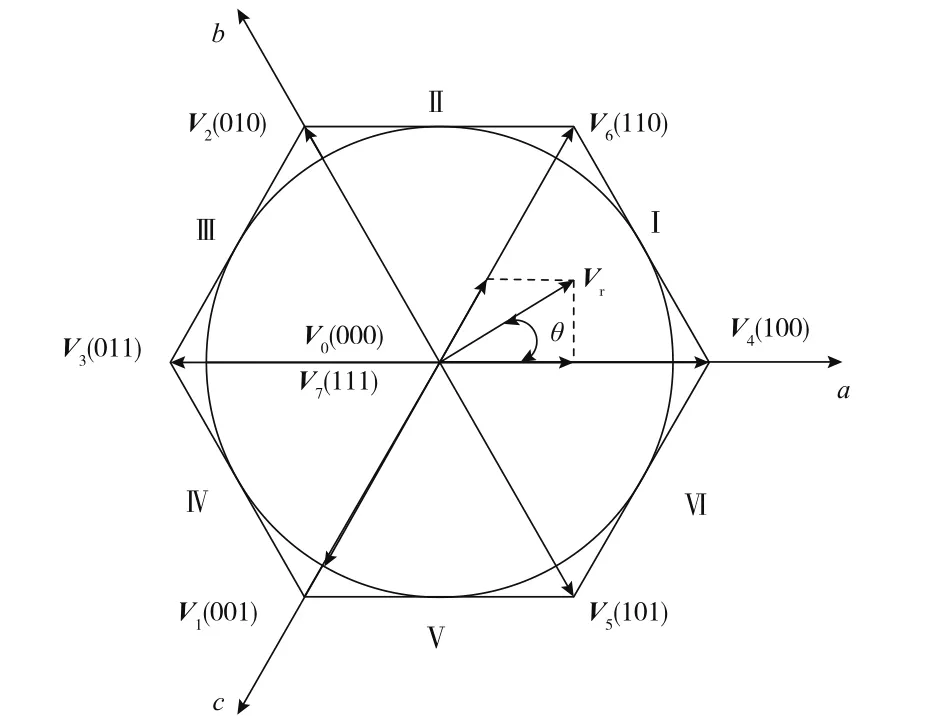
圖3 電壓空間矢量
設某合成矢量位于第一扇區,其相位為θ,模長度為Vr,一個完整的PWM周期為Ts,則其作用效果可用開關向量V1持續時間T1和開關向量V2持續時間T2來等效,即:
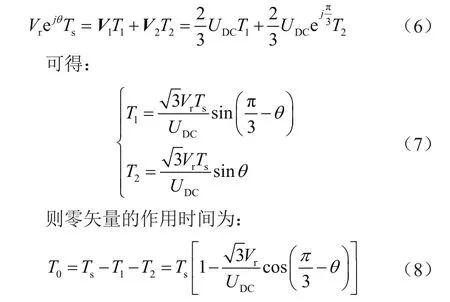
要使PWM逆變器工作在線性調制范圍內,則要求T1+T2≤Ts且T0≥0,將其代入式(8)可得:
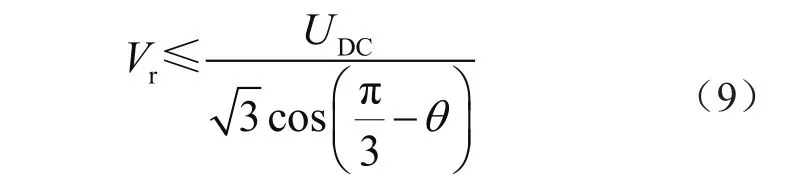
對于任意θ值,式(9)都應成立,其右邊取下限值后可得:


3 UPS系統的硬件設計
本文采用DSP數字處理器設計UPS控制板電路。系統的主要模塊可分為母線電壓檢測模塊、幅值檢測模塊、SVPWM產生模塊以及過電壓過流保護模塊。總線電壓檢測模塊如圖4所示,總線電壓經RC低通濾波器分壓后送入DSP的ADCINA2,另一條總線的電壓通過逆變器和RC濾波器分接到ADCINA3引腳上進行AD轉換。
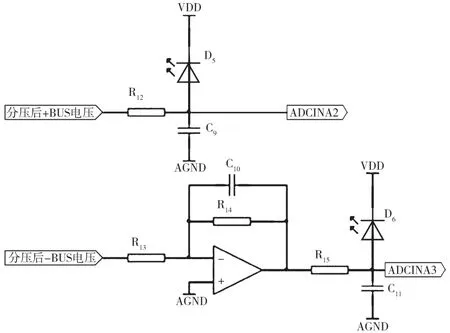
圖4 總線電壓檢測模塊
幅值檢測模塊如圖5所示。該模塊的功能是檢測輸入輸出電壓和電流的幅值,設計了一種正向單向有源精密探測器,其目的是獲得輸出和輸入信號的幅值,并驗證這兩個信號是否具有明顯的線性關系,從而避免普通二極管電路引起的非線性失真。
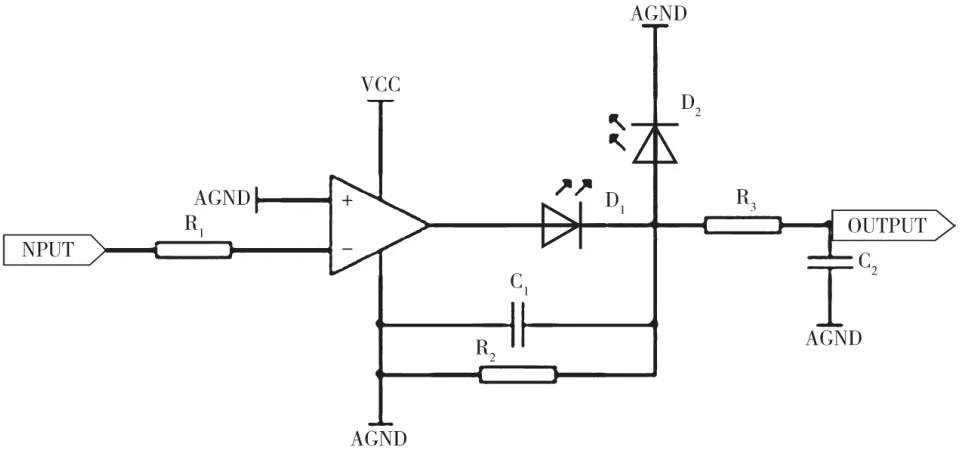
圖5 幅值檢測模塊
SVPWM生成模塊如圖6所示。本文中的UPS采用SVPWM調制方式來實現脈寬調制,利用比較器對三角波和正弦波進行比較,得出三角波與正弦波的時間間隔作為脈沖寬度。
4 實驗結果
實驗過程中,利用示波器檢測市電正常與市電突然掉電情況下的波形。若電網異常,系統自動切換為電池逆變狀態,切換時間小于10 ms,因此可忽略,表明該UPS對電網狀態檢測響應速度快,切換時間短。電網欠壓小于190 V時,UPS輸出由電網轉換為電池逆變狀態,通過逆變器對負載供電,并利用軟開關技術縮短了切換過程,減小了電壓波動。由此可見,UPS系統動態響應速度快,能夠滿足穩定性和動態性能的要求。
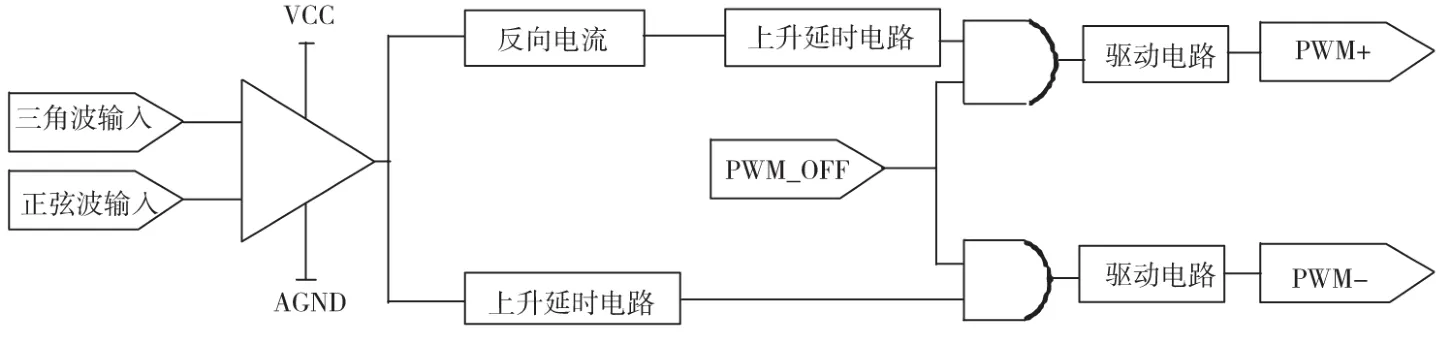
圖6 SVPWM產生模塊
5 結 論
文章完成了基于DSP技術的在線式UPS設計。在線式UPS電源在市電正常時先進行AC-DC變換,然后進行SVPWM調制和濾波,將直流電逆變為交流電向回路的負載供電,同時利用軟開關技術縮短了切換過程,減小了電壓波動。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48