基于樽海鞘算法的PID參數優化
2020-02-02 09:14:12劉亞飛郝玉然韓超杰
通信電源技術 2020年20期
劉亞飛,郝玉然,韓超杰
(1.華北水利水電大學 電力學院,河南 鄭州 450000;2.鄭州地鐵集團有限公司,河南 鄭州 450000)
0 引 言
PID控制由于結構簡單、有效性高、控制效果較好、魯棒性強以及可靠性高,廣泛應用在工業領域。有很多方法可以調整PID控制器參數,如手動調整Ziegler-Nichols法、科恩-庫恩調整法以及Z-N階躍響應法,但手動調整存在一定的局限性。隨著智能算法的不斷提出,智能算法優化PID參數取得了較好的結果。遺傳算法(Genetic Algorithm,GA)[1,2]、粒子群算法(Particle Swarm Optimization,PSO)[3-5]、蟻群算法(Ant Colony Optimization,ACO)[6]、人群搜索算法(Seeker optimization Algorithm,SOA)[7-9]、螢火蟲算法(Firefly Algorithm,FA)[10]以及果蠅優化算法(Fruit Fly Optimization Algorithm,FOA)[11,12]等,在優化PID控制器參數中使系統取得了較好的穩態特性和性能指標。
2017年,Seyedali等人通過模擬樽海鞘在海洋航行和覓食時的群集行為,提出了樽海鞘群算法(Salp Swarm Algorithm,SSA)[13]。在多個數學優化函數上對算法進行測試,觀察并驗證了它們在尋找優化問題最優解時的有效行為。
鑒于樽海鞘群算法簡單易行、收斂快以及計算量小等特點,本文提出將該算法優化不穩定系統PID控制器的參數結果與粒子群算法(PSO)優化結果進行比較。
1 PID控制器
控制系統中有PID控制、滑模控制以及魯棒控制等控制方法。PID控制是工業領域最常見的控制,是一種線性控制器。它根據輸入值r(t)與輸出值y(t)的誤差e(t)控制系統,其中誤差e(t)為:

PID的控制規律u(t)為:

式中,Kp、Ki以及Kd為系統誤差的比例系數、積分系數以及微分系數,τ為積分變量。
2 樽海鞘算法
樽海鞘是一種生活在海洋深處、身體透明、形狀類似水桶的海洋無脊椎動物。它的運動方式與身體構成都與水母十分相似,主要依靠吸收身體周圍的水產生動力。不同于大多數群居生物,樽海鞘由于其自身結構,分布形式并非以“群”而是以“鏈”的形式首尾相連,后一個追隨前一個的形式移動。
這條鏈分為領導者和追隨者兩組。領導者在鏈的開始處占據位置,而其余的樽海鞘是追隨者。在SSA的數學模型中,領導者的位置更新使用方式為:

式中,xi1表示領導者在第i維中的位置;Fi為食物源在第i維中的位置;ubi、lbi為第i維的上、下邊界;c1、c2、c3為隨機數。
c1是平衡探索與開發的重要參數,數學定義為:

式中,t為當前迭代;T為最大迭代次數;c2和c3是生成的[0,1]內的隨機數。更新追隨者位置的方式為:

式中,j≥2;xij表示第j個追隨者在第i維中的位置。
運算迭代過程一般情況下都需要設置兩個門限值充當迭代終止條件。兩個門限值中,一個為最大迭代次數,另一個是適應度門限。算法對目前的最優適應度同提前設置好的門限適應度作比較,當其大于門限適應度時終止循環,輸出當前最優適應度值對應的坐標值用于充當目標位置的估計值。當最優適應度始終都未達到其門限值時,看迭代次數是否達到設置好的最大迭代次數,如果達到則輸出整個迭代過程中適應度最優位置的點坐標作為目標位置的估計值。
3 仿真測試
3.1 實驗平臺
實驗搭建的運行環境為Windows 7、3.20 GHz處理器、8 GB內存,所有算法代碼均用Matlab 2016b編程實現。
3.2 目標函數的選取和控制對象
本文選取ITAE指標作為算法的目標函數。ITAE的定義為:

為了驗證提出的算法IMFO的可行性,選擇不穩定系統進行控制,并分別與使用PSO、MFO與該系統PID控制器參數整定結果對比。
不穩定系統拉普拉斯變換(Laplace Transform)為:

式中,s為復頻率。Simulink下的系統模型如圖1所示。
3.3 仿真結果
利用PSO、SSA算法對該系統進行仿真,得PSO、SSA優化適應度函數曲線和系統階躍響應輸出曲線分別如圖2和圖3所示。獨立運行50次PSO、SSA算法,得出控制系統優化結果,并記錄50次得到的適應度函數值,分別得到適應度函數的平均值、標準差、中值、最好值以及最差值,如表1所示。
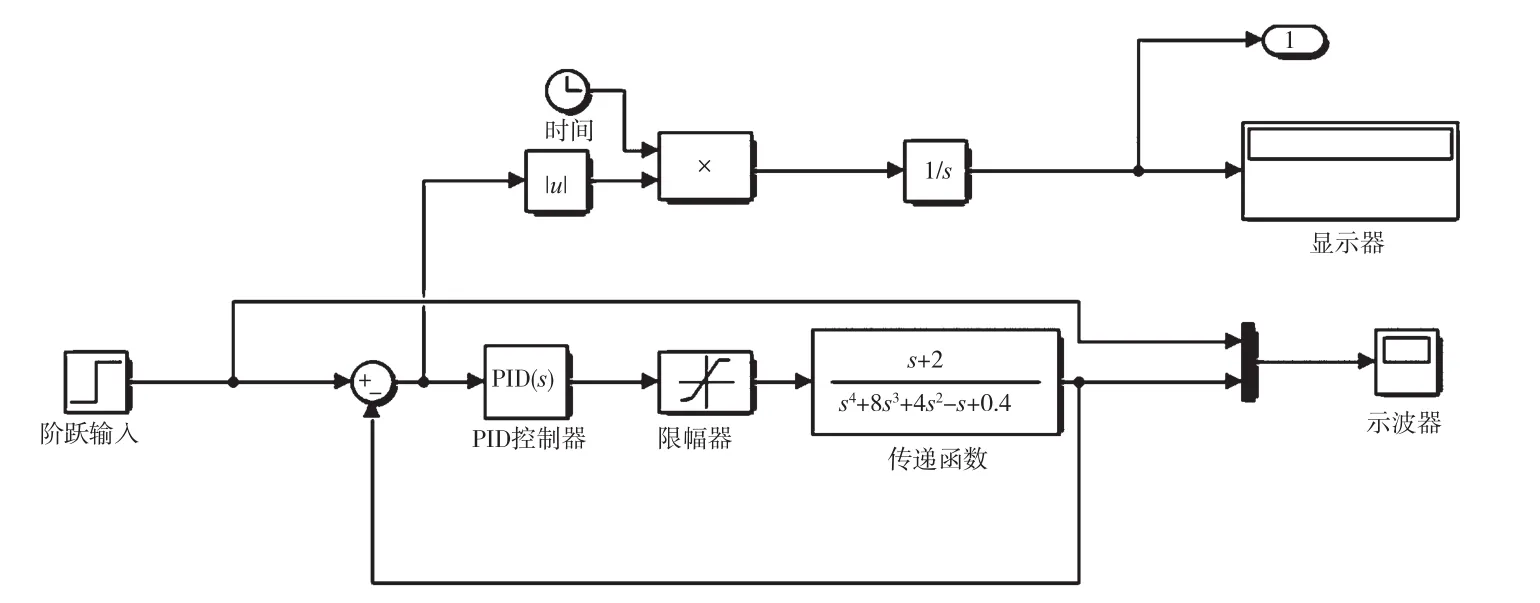
圖1 PID控制仿真模型
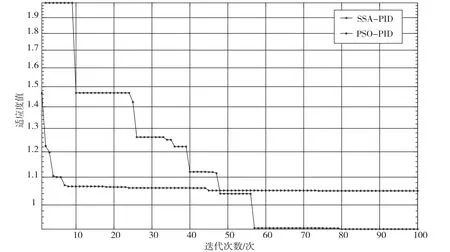
圖2 適應度函數控制曲線
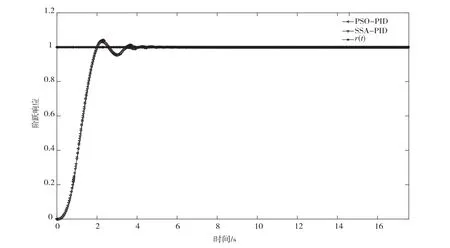
圖3 算法優化后的系統階躍響應

表1 算法評價指標
由圖2適應度函數控制曲線可知,SSA算法比PSO算法收斂速度快、精度高,易找到全局最優解。從階躍響應輸出曲線來判斷,PSO算法平穩時間較長,超調量較大。SSA算法相對于PSO算法,算法控制精度高、收斂快,證明了本文算法的有效性和優越性。通過表1中50次運行結果可以看出,SSA比PSO具有更好的優化結果,算法魯棒性較好。
4 結 論
為了進一步優化PID參數,本文提出樽海鞘算法(SSA)對PID控制器進行參數優化,通過不穩定系統仿真驗證了該算法的有效性和優越性。通過與PSO算法對比可知,SSA算法具有更高的控制精度和魯棒性,能夠為系統PID參數優化提供可靠依據,可使工業控制領域中系統收斂到最優狀態,具有廣闊的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34