基于神經網絡整定的PID控制變量施藥系統設計與試驗
2020-02-02 04:07:44孫文峰劉海洋王潤濤付天鵬呂金慶王福林
農業機械學報 2020年12期
孫文峰 劉海洋 王潤濤 付天鵬 呂金慶 王福林
(1.東北農業大學工程學院, 哈爾濱 150030; 2.嶺南師范學院信息工程學院, 湛江 524048)
0 引言
施用農藥是防治病蟲草害最為快速、經濟、有效的手段。由于植保機械制造及使用水平相對低下,嚴重影響了植保作業的效果[1-2]。目前,大田施藥仍以定量施藥方式為主,車輛低速行走時易造成藥害殘留,車輛高速行走時易造成藥液沉積少而無法有效控制病蟲草害。因此,農業生產中亟需能隨車速變化而相應改變噴量的高效、低污染植保噴霧設備。
變量噴霧是實現精準施藥的一種重要技術方式[3]。歐美等發達國家的大田變量施藥相關研究開展較早,已經取得長足的進展,相關技術已在市場上推廣使用[4-7]。變量噴霧主要通過整合機具速度和管道壓力等機器信息、識別田間作物病蟲草害和形態等作物信息來實現變量、按需施藥。按調節方法變量噴霧可分為濃度調節式、流量調節式和壓力控制式[8-12]。ELAISSAOUI等[13]基于電子控制系統設計了一套小型直接注入式噴霧系統,該系統能夠有效提高原液利用率,且噴霧狀態穩定,但藥液濃度改變延時較長。NEEDHAM等[14]研制了一種比例電磁閥控制系統,電磁閥與噴嘴耦合,利用高頻(10 kHz)脈寬調制信號占空比改變閥門開度、調節通過藥液的流量。PWM式流量調節技術對霧化效果和管道壓力影響較小,但高頻調節時需要優質高速電磁開關閥支持,低頻調節時霧化狀態不連續。壓力控制式變量噴霧系統主要通過改變噴霧管道的控制閥開度進而實現變量噴霧。孫睿[15]設計了一種基于PID模糊控制理論的壓力調控變量噴霧系統,建立了以載體農機動態速度為輸入變量、控制閥驅動電壓為輸出變量的模糊控制規則。但在模糊控制策略下,系統上升時間較長,且穩定性較低。壓力調控變量噴霧系統雖然因頻繁改變管道壓力而影響噴霧均勻度,但該系統具有結構簡單、造價低廉、應用性強等優勢,因此廣泛應用于大田變量噴霧作業中。國內外學者對變量施藥的工作原理及應用進行了深入研究,但對現存變量施藥控制算法滯后及超調優化方面的研究較少[16-21]。
為提高作業效率和農藥利用率,本文設計一種流量自適應的變量施藥系統,以調控管路回流量為目的,以神經網絡PID控制為實施算法,減少系統滯后時間及超調量,并進行相應田間試驗,驗證系統可行性和算法優越性。
1 系統組成與設計
1.1 系統結構組成
變量施藥系統結構與組成如圖1所示。液位傳感器安裝在藥箱底部并與變量噴霧控制器相連,以此監控藥箱液位是否在安全范圍內。藥液受動力輸出軸所驅動的隔膜泵作用依次流經主閥、過濾器,高壓藥液經手動調壓閥第1次分流,一部分藥液由調壓閥流回藥液箱,另一部分形成穩定壓力的藥液經電控調節閥第2次分流,一部分流回藥液箱,另一部分依次流經流量傳感器、分配閥、壓力傳感器供給到噴頭處,流量傳感器與壓力傳感器分別與變量噴霧控制器相連并實時監測系統的機器信息。本文采用霍爾型速度傳感器,獲取裝備的實時前進速度信息[22]。手動調壓閥和電控調節閥開度均可調,其中電控調節閥為變量施藥系統的主要執行部件,其安裝在回流管路上,接收來自變量噴霧控制器的指令信號,通過改變系統藥液回流量進而實現變量施藥的工作目標。
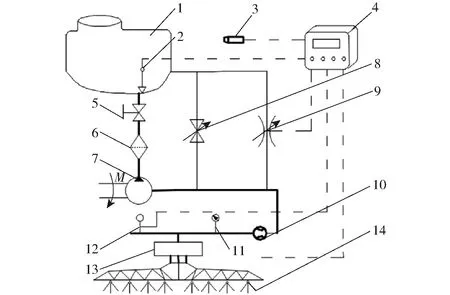
圖1 變量施藥系統管路結構與組成示意圖Fig.1 Schematic of pipeline structure and composition of variable application system1.1000L藥液箱 2.投入式液位傳感器 3.速度傳感器 4.變量噴霧控制器 5.主閥 6.過濾器 7.隔膜泵 8.手動調壓閥 9.電控調節閥 10.流量傳感器 11.壓力表 12.壓力傳感器 13.分配閥 14.扇形噴頭
1.2 電控部分設計
選用的中央控制處理器為STC12C5A60S2型單片機,主要完成對車速、流量、液位、壓力信號的處理,對鍵盤和控制閥的驅動以及控制LCD12864的顯示和控制算法運行;選用JK8002C型霍爾速度傳感器;選用檢測范圍為7.5~150 L/min的LWGYA-20型渦輪流量傳感器,主要完成對管道流量信號的采集;選用SC-PB800型壓力傳感器,其檢測范圍為0~1.6 MPa;采用CBM-2100型投入式靜壓液位計,其檢測范圍為0~200 m;設計了LM2596電源轉換模塊,以保證將車載蓄電池12 V電壓轉換為穩定的5 V直流電供系統使用;使用4個MOS管設計成H橋電路來驅動電控調節閥內部電機,從而使電控調節閥開度能夠按需調控。為采集系統工作信息,基于LabVIEW開發了上位機監測軟件,同時調用Excel在采樣周期為1 000 ms情況下實時記錄機組信息,系統框圖如圖2所示。
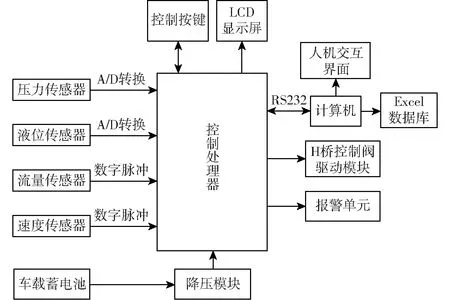
圖2 噴霧系統控制原理框圖Fig.2 Block diagram of spray system
2 系統控制策略
變量施藥系統需實現的技術目標為系統能夠根據牽引機具所行進車速而實時調控施藥量。因此該系統是以單片機為控制核心,速度傳感器輸入數據為調控依據,調節閥為執行機構的變量施藥系統。
2.1 控制原理
農田施藥是一個復雜過程,需要控制的因素較多[23],本文采用的變量施藥方式實質是通過變量噴霧控制器的鍵盤及顯示屏采用人機交互方式預先設置每公頃施藥量、噴頭數目及噴頭間距等參數。工作過程中,控制器通過采集機具行進速度計算出當前所需流量,與流量傳感器采集的實時流量數據進行對比計算偏差,將偏差等參數作為系統輸入量,通過神經網絡PID控制算法修正控制參數,根據計算輸出后電壓的變化實現閥門開度的調節,改變管路藥液回流量,進而使實際施藥量與目標理論流量不斷接近,達到變量施藥目的。目標理論流量與作業速度關系式為
(1)
式中q1——目標理論流量,L/min
C——每公頃施藥量,L/hm2
v——行進車速,km/h
d——噴嘴間距,cm
m——噴頭數目
由質量守恒可知
q2=Q-q1
(2)
式中q2——目標回流量,L/min
Q——主管路流量,L/min
2.2 主要參數檢測
系統以多傳感器的檢測數據為控制依據,處理器對數據進行分析與計算,并發出相應指令。過程中,通過相應的數學模型對數據計算后推導出相應的作業參數。
2.2.1速度檢測
速度傳感器安裝在拖拉機后輪軸內側,每有一個金屬元件接近時會產生一個脈沖,通過對車輪轉動時脈沖計數的方式計算當前車速,其計算式為
(3)
式中r——車輪半徑,m
N——后輪軸上金屬元件個數
p1——時間間隔t1時系統接收脈沖數
2.2.2液位和壓力檢測
液位和壓力主要為系統提供預警及監測作用且輸出均為模擬量,需經A/D將檢測的模擬量轉換為數字量,為避免藥箱內無藥液進而導致隔膜泵空轉,當藥箱液位低于設定值后需進行報警。由于傳感器量程與其所輸出模擬信號范圍呈線性關系,故液位檢測值計算式為
(4)
式中H——液位檢測值,mm
Hmax——液位測量上限,mm
Hmin——液位測量下限,mm
IWd——液位采樣值,mA
IWmin——液位模擬量輸出下限,mA
IWmax——液位模擬量輸出上限,mA
在實際施藥過程中,如果施藥系統在流量傳感器之后的管路連接處產生破損,由于系統流出藥液流量正確,無法得知系統是否存在“漏液”現象;當某些噴頭體過濾網處產生“堵塞”現象時,會造成其余噴頭流量增大進而導致橫向施藥不均;上述兩種工況發生時僅從流量傳感器所傳輸數值無法知曉,因此系統需要通過壓力傳感器所傳輸數據判斷管道壓力是否在安全范圍內,進而判斷是否發生上述兩種現象。壓力檢測值計算公式為
(5)
式中p——壓力檢測值,MPa
pmax——壓力測量上限,MPa
IYd——壓力采樣值,mA
IYmax——壓力模擬量輸出上限,mA
IYmin——壓力模擬量輸出下限,mA
2.2.3流量檢測
流量傳感器輸出為脈沖信號,藥液流經流量傳感器后全部從噴頭處流出,故流量傳感器所檢測數值為實際施藥量。所采用的流量傳感器內部渦輪在藥液作用下旋轉,使其內部磁場產生變化,經由放大器作用后輸出連續矩形脈沖信號,其計算公式為
(6)
式中q3——實際施藥量,L/min
p2——時間間隔t2時系統接收脈沖數
f——流量計系數,取380脈沖/L
2.3 控制器主程序設計
變量噴霧控制采集系統各項參數作為控制依據,利用神經網絡PID控制策略進行參數修正。首先系統初始化并進行按鍵掃描,主要包括端口配置初始化、串口和定時器初始化等,與此同時調用LCD12864液晶顯示屏的顯示子程序;當選擇自動模式后,檢測藥箱液位是否高于最低值,同時控制器發出指令,電控調節閥進行調節;之后開始檢測車輛速度并實現閥門開度的調節;最后將數據發送到上位機儲存在Excel數據庫中,具體流程如圖3所示。
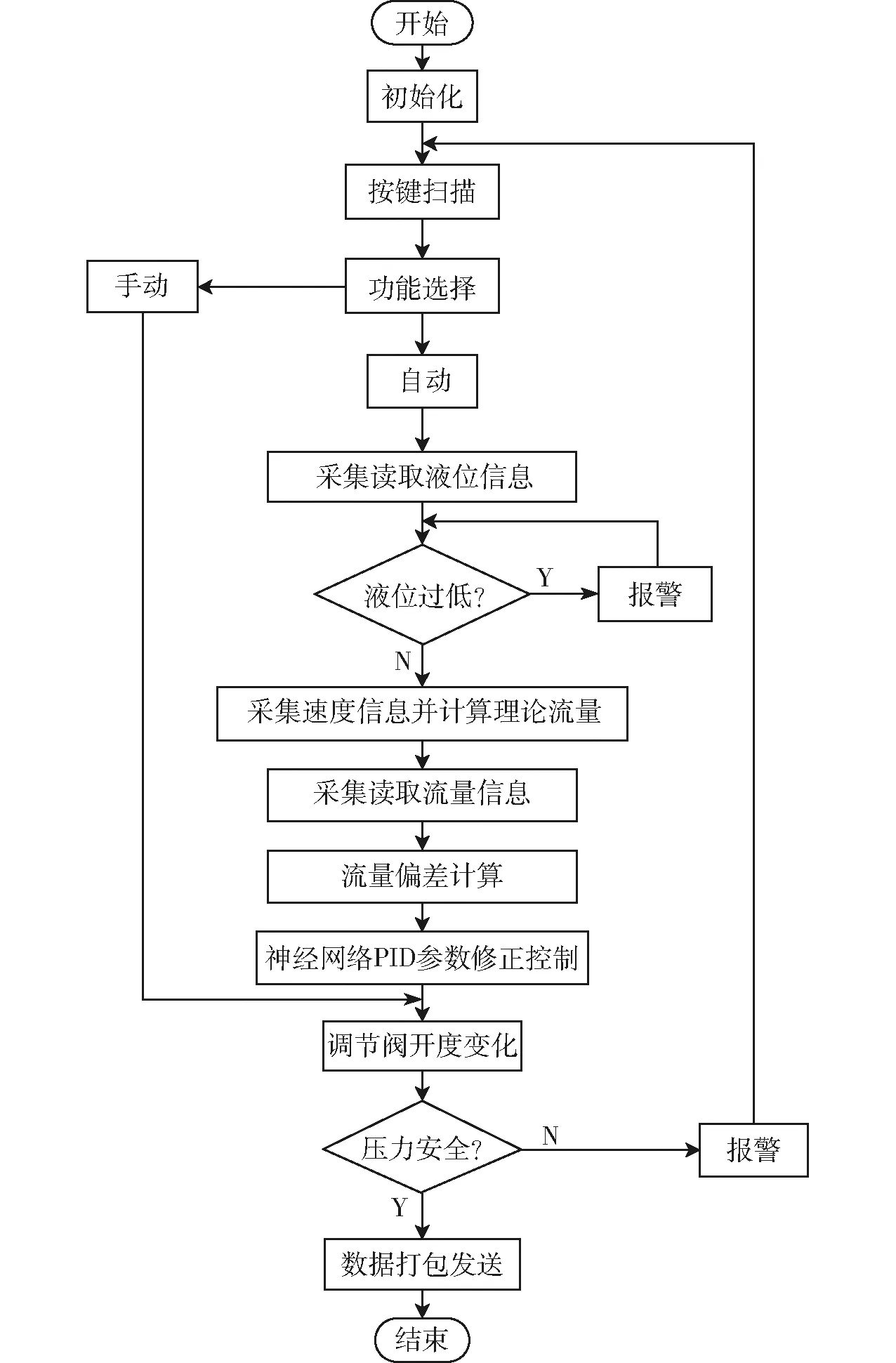
圖3 主程序流程圖Fig.3 Flow chart of main program
當車速低于4 km/h且不為零時,由于本系統所采用的噴頭總成均帶有防后滴裝置,為保證壓力足以頂開防后滴裝置的彈簧機構使藥液得以霧化,故管路壓力應不小于0.1 MPa,需使電控調節閥保持一定開度,因此在系統剛開始啟動時電控調節閥處于關閉過程中。在使用36套3號噴嘴的前提下,不同設定施藥量與管路最低流量對應關系如表1所示。
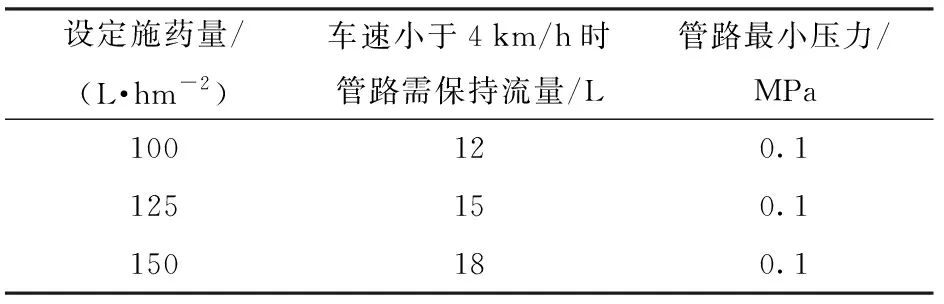
表1 不同施藥量下管路最低流量Tab.1 Minimum flow rate under different dosages
3 控制算法
常規PID控制存在超調大、干擾后調整時間長、穩態誤差較大等問題,并不適用于變量噴霧系統調節,只有調整參數kp、ki、kd,才能取得較優的工作結果。模糊控制雖然可以很好地解決系統的非線性模型問題,但穩定性低及學習能力差的缺點制約其在實際生產中的應用。學習算法和結構簡單的BP神經網絡已經被廣泛應用于PID參數的整定過程中,借助其函數逼近特性及自學習能力不斷地修正參數減小偏差,實現控制參數再整定,最終能夠取得較好的控制效果[24-29]。
3.1 經典增量式PID控制
采用經典增量式PID控制,其公式為[24]
u(k)=u(k-1)+kp(e(k)-e(k-1))+
kie(k)+kd(e(k)-2e(k-1)+e(k-2))
(7)
式中kp——PID比例控制系數
ki——PID積分控制系數
kd——PID微分控制系數
k——采樣序號,k=0,1,2,…
u(k)——第k次采樣實際流量,L/min
e(k)——第k次采樣流量偏差,L/min
3.2 BP神經網絡PID控制算法實現
采用帶有動量項的BP網絡,通過仿真表明隱含層有5個節點時其表現性能較好,準確度較高。設置輸入神經元j=3;隱含層神經元i=5;輸出神經元l=3,輸入層的輸入分別為第k次采樣時刻流量偏差、理論流量值、實際流量值,將PID控制器的3個控制系數kp、ki、kd與輸出層的3個輸出節點相對應,由于3個系數均不能為負數,故輸出層選用非負Log-Sigmoid作為激勵函數[30],其學習速率η=0.2,慣性系數α=0.05,權系數初始值選取[-0.5,0.5]內的隨機數,控制策略如圖4所示。
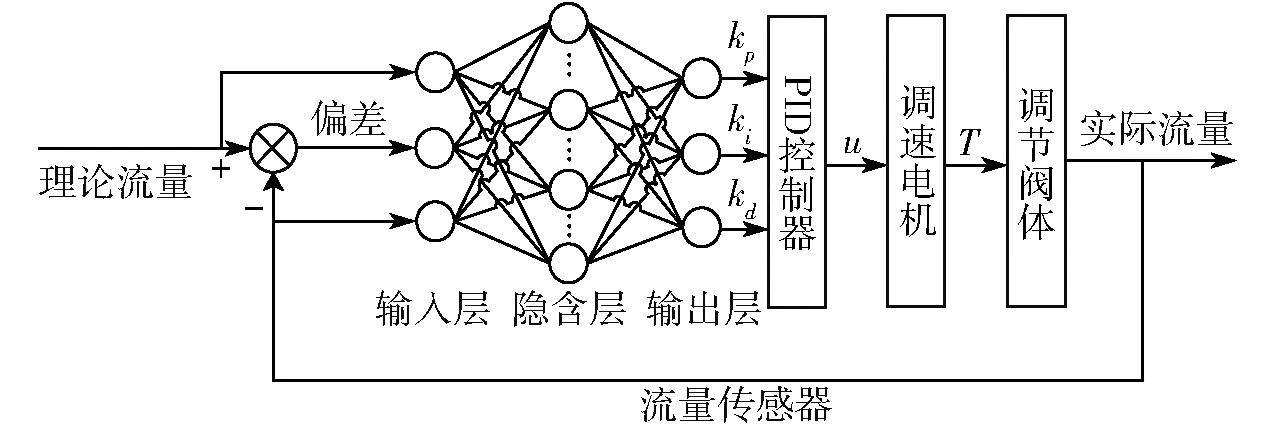
圖4 神經網絡PID控制策略圖Fig.4 NNPID control strategy diagram

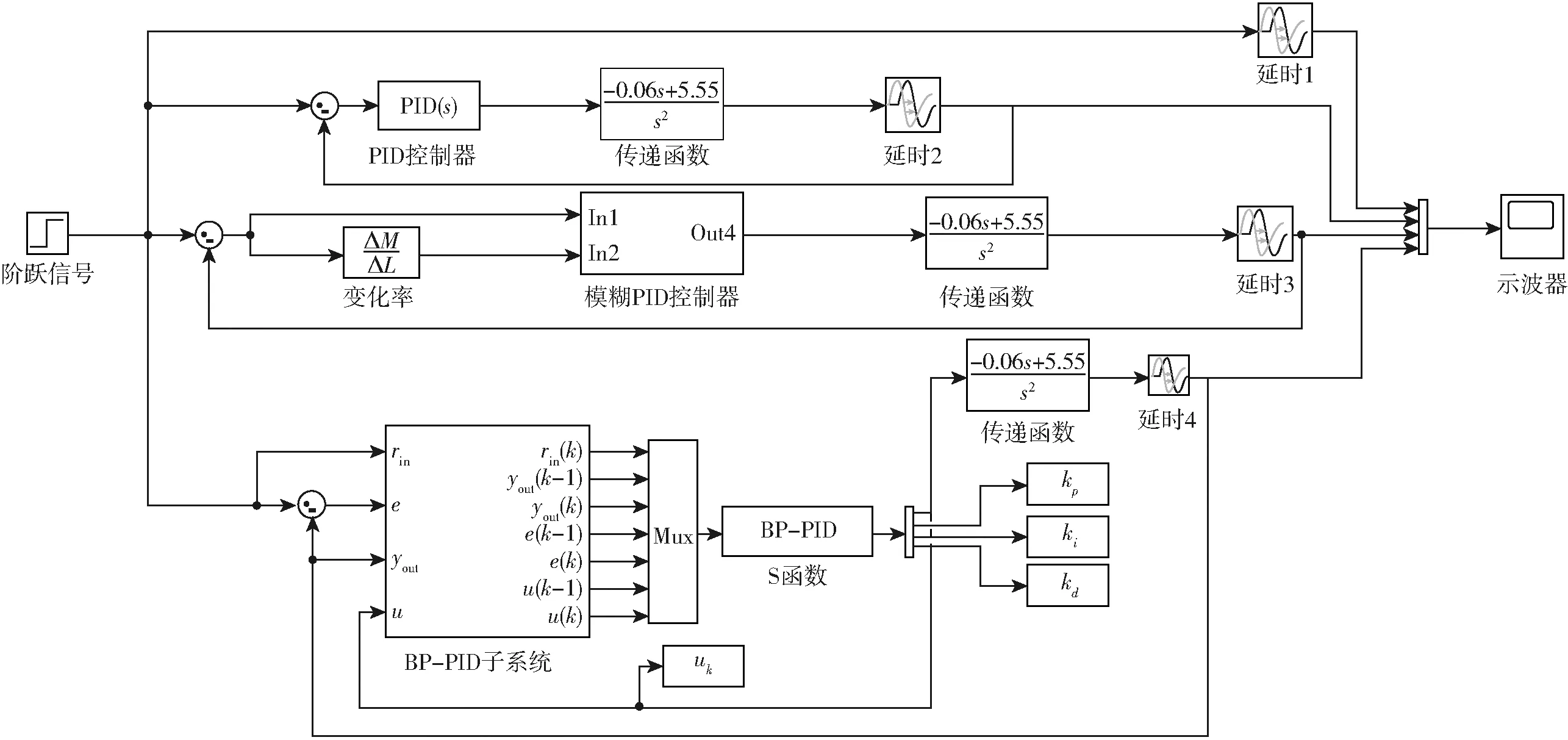
圖5 BP神經網絡PID/模糊PID/常規PID控制系統Fig.5 BP neural network PID/fuzzy PID/traditional PID control system
系統結構輸入層的輸入為
(8)
隱含層的輸入和輸出為
(9)
(10)
隱含層激勵函數為
(11)
網絡輸出層輸入和輸出為
(12)
(13)
在BP神經網絡誤差反向傳播階段,為了使輸出流量與輸入流量之差均值極小,通過系統信號傳播所產生的誤差可計算網絡內各連接權值的更新調整量,通過調整網絡加權系數使輸出流量無限接近理論流量。
4 仿真與分析
為了驗證BP神經網絡整定的PID參數控制對于農用噴霧控制的優越性,運用Matlab/Simulink平臺引入S函數分別搭建了常規PID控制、模糊控制PID及BP神經網絡PID的控制模型,如圖5所示,其中對于常規PID控制采用試湊法分別確定其比例、積分和微分參數,通過調整最終確定kp=1.2,ki=0.2,kd=0.8;其中對于模糊控制,采用文獻[15]所建立的模糊控制原則對控制模型進行搭建。通過階躍仿真對3種控制方式進行對比,結果如圖6所示。
由表2、圖6可知,在階躍信號作用下,BP-PID決策下系統上升時間為0.25 s,超調量為1.30%,穩態誤差為±0.26%。模糊控制PID上升時間為0.64 s,超調量為18.2%,穩態誤差為±0.94%。常規PID控制上升時間為0.30 s,超調量為50.9%,穩態誤差為±1.21%。綜上所述,BP神經網絡PID控制在階躍響應上超調量較少、上升時間較短、穩態誤差較小。通過仿真可知,BP-PID控制在所搭建的控制模型下能夠較好地解決常規PID存在超調量大、模糊PID存在滯后的問題,并能夠取得較好的響應效果。
5 田間試驗
試驗于2020年7月14—18日在東北農業大學種植基地進行,試驗地為馬鈴薯壟作地,以水為試驗介質,由于本次試驗需使用水敏紙(日本AS ONE)探究使用變量噴霧控制系統的液滴沉積效果,應避免田間相對濕度及葉片呼吸作用對本試驗的影響。故霧滴沉積效果探究試驗時間選在14:00—15:00,試驗時空氣相對濕度為68%,環境溫度為27℃。噴霧裝置為3WF-1000型懸掛式噴霧機,配有1 000 L藥液箱、MB390/3.0型隔膜泵、TEEJET AIXR11003型噴嘴(36套)、液壓折疊系統、幅寬18 m桁架,牽引機具為約翰迪爾904拖拉機,施藥控制器為自主研制的PW-01型變量噴霧控制器,如圖7所示。
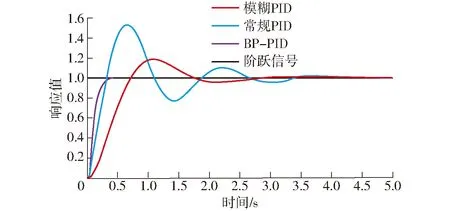
圖6 階躍跟隨曲線Fig.6 Step following graph
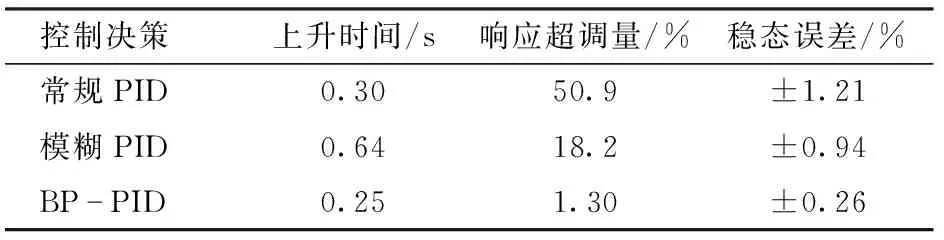
表2 階躍響應結果對比Tab.2 Comparison of step response results
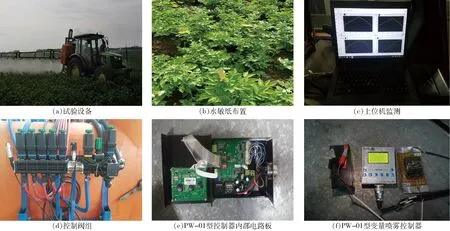
圖7 田間性能試驗Fig.7 Field performance experiment
試驗參考GB/T 20183.3—2006《植保機械 噴霧裝置 農業液力噴霧機每公頃施液量調節系統試驗方法》,標準要求試驗時行進車速為5.4~9 km/h。考慮到田間實際作業是在外界條件多脅迫情況下進行,并且田間實際工作時在啟車及駐車階段(車速較低時)均會進行施藥作業,故本試驗行進速度范圍在國家標準基礎上有一定延伸,最低速度設為0 km/h;同時由于本系統選擇3號噴嘴,在施藥量為150 L/hm2情況下,為保證噴嘴工作壓力不高于0.4 MPa(噴嘴優選的工作壓力)[31],以延長其使用壽命及保證噴霧作業橫向均勻性,試驗最高速度設為11 km/h(噴嘴壓力為0.4 MPa),故行進速度范圍為0~11 km/h。
5.1 動態流量跟隨對比試驗
為更好驗證所設計的BP-PID變量施藥系統在實際作業中的實時調控優越性,采用車速隨機變化的方式來驗證BP-PID變量施藥系統與模糊PID變量噴霧系統的動態跟隨性,模糊PID控制系統采用課題組自行研發并已在市場推廣使用的變量施藥系統[15]。設定需求噴霧量150 L/hm2,駕駛員操控拖拉機使車速在4~11 km/h范圍內隨機變化,拖拉機啟動后首先打開動力輸出軸進行噴霧作業,當車速到達4 km/h后開啟變量噴霧控制器進行施藥量調節并記錄;通過控制油門緩慢增速達到11 km/h后逐漸減速至4 km/h時停止施藥;變量噴霧控制器通過RS232串行通信接口與便攜式計算機相連,通過上位機監測軟件實時計算并記錄當前車速、壓力、理論流量及實際流量。通過曲線形式在上位機展示并實時記錄儲存在Excel數據庫中,模糊PID控制下試驗結果如圖8所示,BP-PID控制下試驗結果如圖9所示。
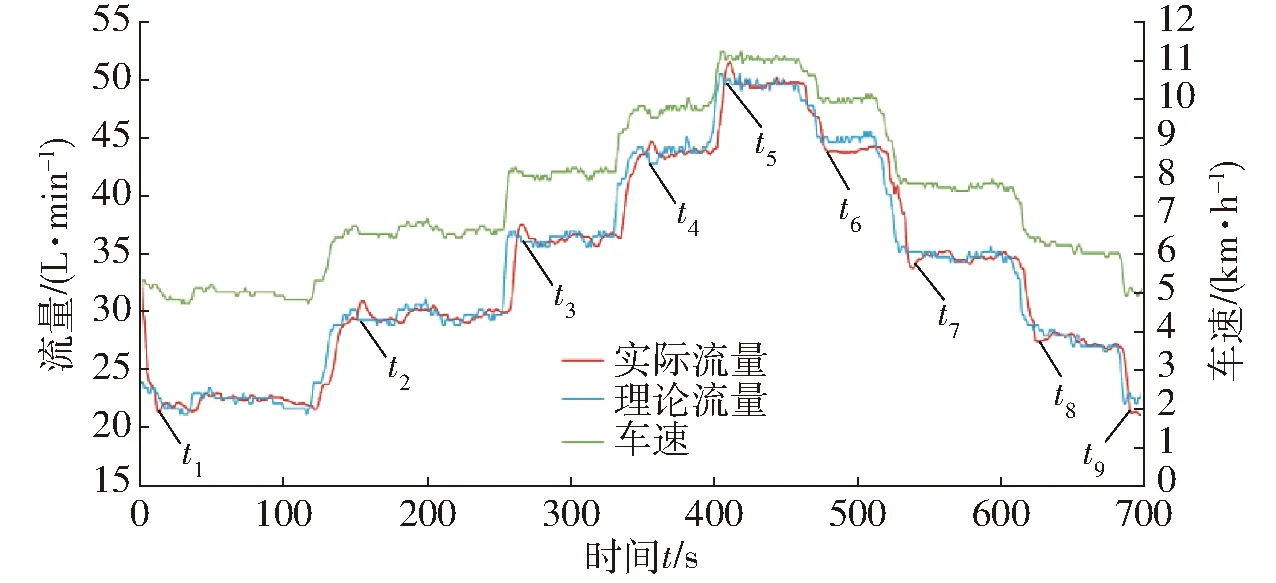
圖8 模糊PID控制動態跟隨流量、速度響應曲線Fig.8 Dynamic follow flow and velocity response curves of fuzzy PID control

圖9 BP-PID控制動態跟隨流量、速度響應曲線Fig.9 BP-PID control dynamic follow flow and velocity response curves
由圖8可知,變量施藥系統采用模糊控制策略會產生1~4 s的滯后;在時刻t2、t3、t4、t5,由于車速增加,噴霧量跟隨產生上升超調,在時間段t2~t5內平均施藥量為157.3 L/hm2,在時刻t1、t6、t7、t8、t9由于系統啟動或車速下降,噴霧量跟隨產生下降超調,在時間段t6~t9內平均施藥量為134.8 L/hm2;整個噴霧過程共噴灑394.5 L,由于增速和減速而產生的超調量為17.6%,平均調整時間為2.54 s;利用Excel軟件統計試驗實測施藥量為142.1 L/hm2,與理論值相差5.9%。
由圖9可知,變量施藥系統采用BP-PID控制策略,流量跟隨緊密,解決了模糊PID控制存在的超調及滯后問題;整個噴霧過程共噴灑752.3 L,平均超調量為2.1%,平均調整時間為0.72 s;統計試驗實測施藥量為151.9 L/hm2,與理論值相差1.3%。
5.2 流量控制精度和縱向施藥均勻度試驗
5.2.1流量控制精度試驗
目前我國大部分地區莖葉處理施藥量為100~150 L/hm2,試驗前設置施藥量為100、125、150 L/hm2。為驗證所設計的BP-PID變量施藥系統在設定施藥量情況下的流量控制精度,首先切換至手動調節模式并采用給定速度試驗方式屏蔽車速傳感器,給定系統車速分別為6、7、8 km/h,在流量顯示值穩定后記錄數據;隨后系統切換至自動調節模式,車輛田間試驗時在車速0~11 km/h范圍內隨機變化,當液位低于設定下限,控制器報警后停止試驗,其試驗結果如表3所示。由表3可知,在進行速度給定試驗時,系統實現了“高速多噴,低速少噴”的作業目標。且由于拖拉機未在田間行走,降低了施藥量誤差,在速度和設定施藥量各水平組合試驗下,試驗誤差均不大于2%。在進行田間行走試驗時,流量隨著車速的不斷改變而變化,由于試驗是在田間多因素脅迫下進行,所以產生誤差較大,但系統總體誤差仍穩定在3%以內。該系統可實現根據車速調節流量的變量噴霧作業目標,且控制精度較高,適用于大田作業。
5.2.2縱向施藥均勻度試驗
提升現有施藥方式縱向(機組行進方向)施藥均勻度是本文的主要目標。選取表3中控制器處于自動調節模式下的9組試驗數據作為BP-PID控制決策施藥系統的樣本來源,同時采用模糊PID控制決策下的施藥系統進行對比試驗,每組重復3次。以機組每行進5 m所噴灑區域(90 m2)施藥量作為計算數值,以此探究所設計變量施藥系統的縱向施藥均勻度。部分噴灑區域施藥量如表4所示。
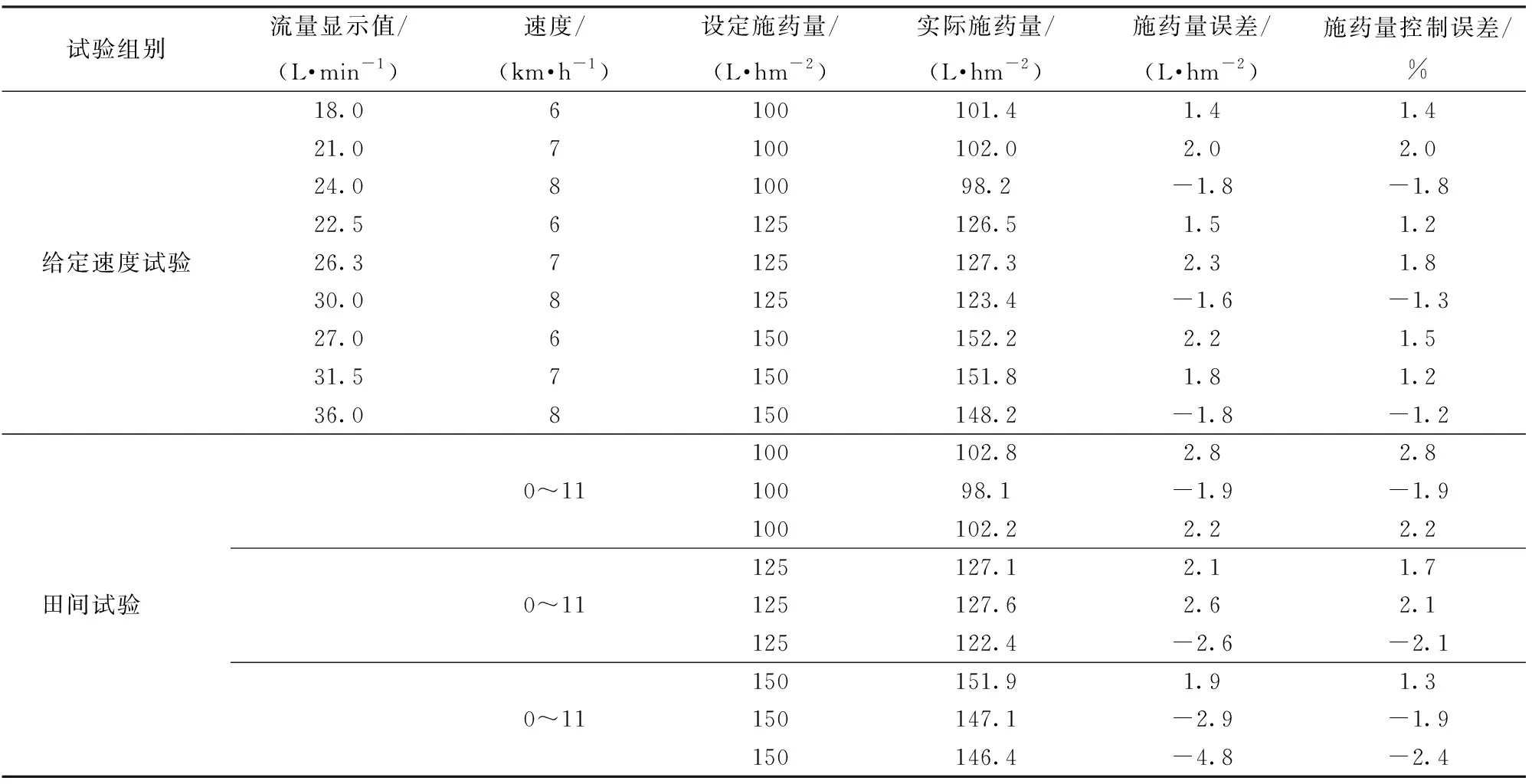
表3 噴霧試驗結果Tab.3 Spray test results
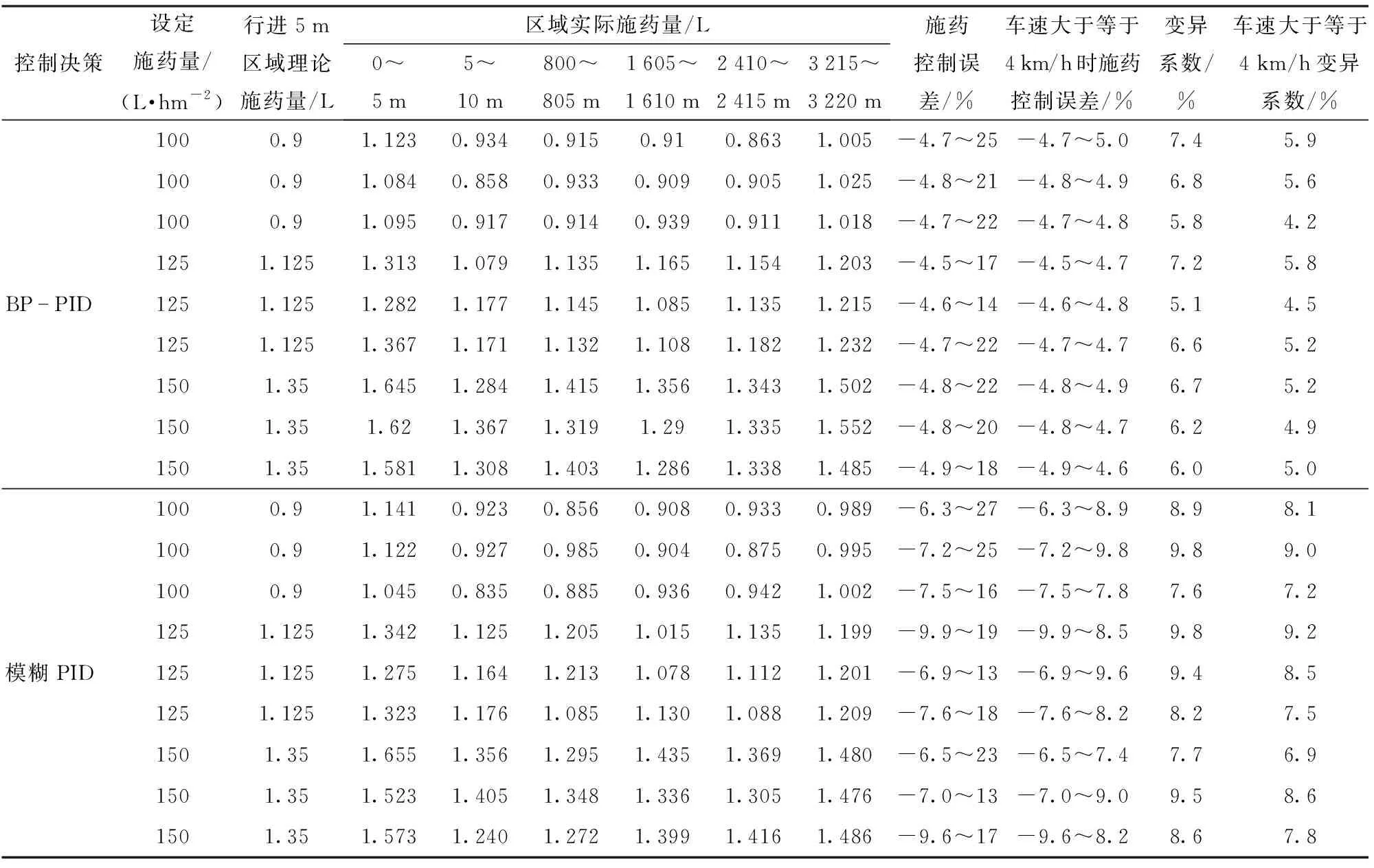
表4 縱向施藥均勻度試驗結果Tab.4 Longitudinal application uniformity test results
由表4可知,BP-PID控制決策下的施藥系統在整個施藥作業過程中,施藥控制誤差最小為-4.5%~14%,控制精度較差,而當工作過程中車速大于等于4 km/h時,施藥控制誤差穩定在-5%~5%之間,控制精度較好,由于當車速低于4 km/h時,為保證管路壓力足以頂開防后滴裝置進行噴霧作業,從而使此區域施藥量較高(0~5 m區域啟車階段、3 215~3 220 m區域駐車階段);當工作過程中車速大于等于4 km/h時,計算不同設定施藥量各噴灑區域施藥量變異系數均小于6%,且組間平均值為5.1%。對于模糊PID控制決策下的施藥系統,當工作過程中車速大于等于4 km/h時,施藥控制誤差最小為-6.3%~7.4%;當工作過程中車速大于等于4 km/h時,計算不同設定施藥量各噴灑區域施藥量變異系數最小值為6.9%,且組間平均值為8.1%,相較采用BP-PID控制決策下的施藥系統高3個百分點,原因是由于模糊PID控制在實際工作中產生的超調及滯后。綜上所述,說明本文所設計的變量施藥系統的縱向施藥均勻度較好,性能穩定。
5.3 霧滴沉積性能試驗
將水敏紙均固定在植株上端葉片,為避免由于采集時間過長而造成水敏紙局部甚至整張變色,同時為減少試驗誤差,各個車速下隨機設置6個水敏紙取樣區域,每個取樣區域面積為1 m2,區域間隔保持5 m以上,各取樣區域內采用五點取樣法選取5株植株作為取樣點,將水敏紙使用訂書器固定在葉片上。在田間設置車速區段提示物及車速變化緩沖帶,經過提示物時駕駛員操縱手動油門適時增速或減速。為了便于數據分析,取因素水平分別為5、6、7、8、9、10 km/h。噴霧機作業后取下水敏紙,帶回實驗室進行分析,試驗取每平方厘米霧滴沉積數為試驗指標,將每個取樣區域內5個取樣點水敏紙霧滴沉積數量統計并取平均值作為該取樣區域數值進行分析。每個車速下取樣區域序號為1、2、3、4、5、6[32-33]。采用樣條插值法繪制車速動態變化下液滴沉積數量如圖10所示。
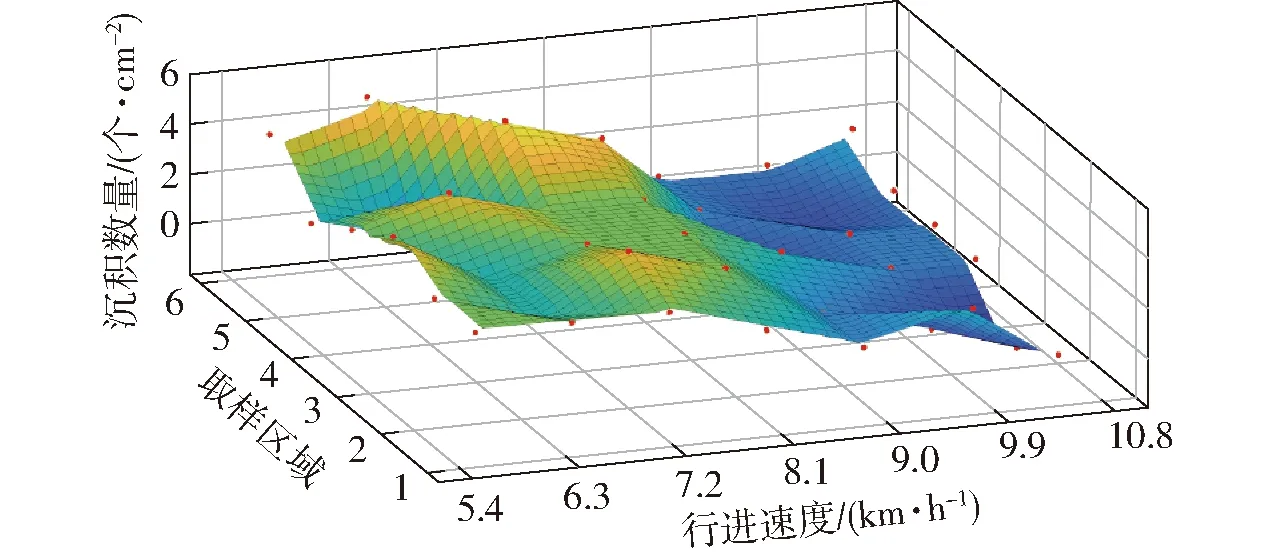
圖10 車速動態變化下液滴沉積數量Fig.10 Droplet deposition under dynamic change of vehicle speed
采用文獻[34]的計算方法,取各車速下液滴沉積數量平均值作為對比數據。隨著車速不斷增加,液滴沉積數量呈減少趨勢,原因可能是由于壓力增加后液滴粒徑尺寸變小,并且拖拉機高速行駛時后方流場作用和相對風速增加而加劇了飄移,但極差為3.1個/cm2,表明數據變化浮動不大。變量噴霧系統在車速變化時藥液沉積數量較穩定。
對每個車速下的各取樣點計算霧滴沉積數量標準差。由圖11可知,隨著車速增加,霧滴沉積數量標準差并無明顯變化趨勢,均小于1.4個/cm2。說明變量噴霧系統在各個車速下霧滴沉積數量較穩定,并無明顯差異。
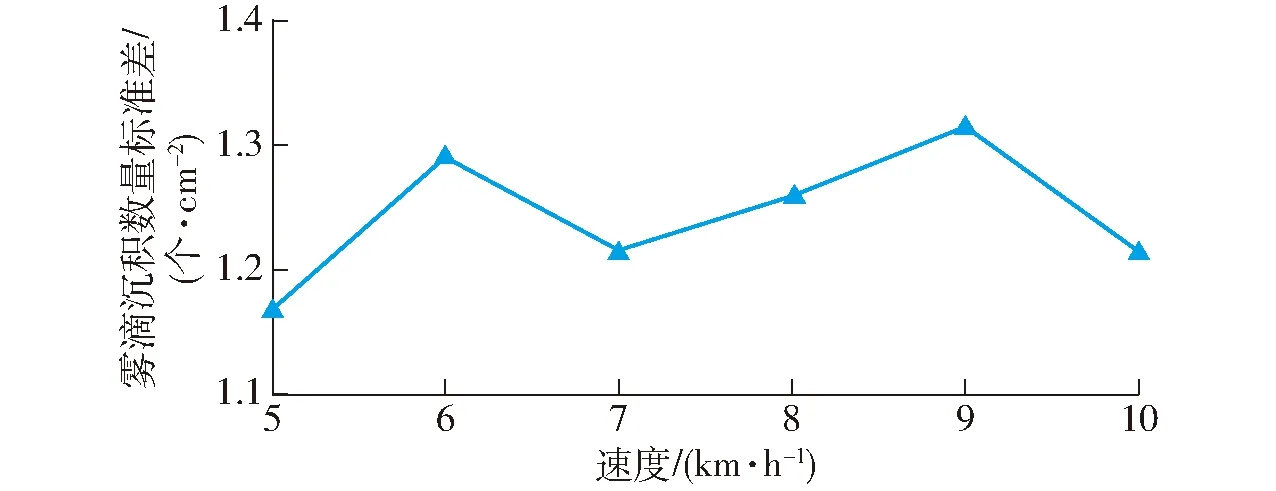
圖11 各車速下霧滴沉積數量標準差Fig.11 Standard deviation curve of droplet deposition number at different speeds
圖12為噴霧作業后沉積效果,國家標準要求進行防蟲或防病噴霧作業時,作物上沉積液滴數量最低為30個/cm2。結合試驗數據分析,本系統工作時單位面積最低沉積數量為38個,作業效果高于國家標準[31]。綜上所述,采用本文設計的變量噴霧施藥方式下液滴沉積密度符合國家標準,其變異系數低,適用于大田作業。

圖12 噴霧作業后水敏紙液滴沉積效果Fig.12 Water-sensitive paper droplet deposition after spray operation
6 結論
(1)針對常規大田定量噴霧方式下容易產生藥害殘留及少噴的情況,同時為了提高現有變量噴霧控制系統的時效性,解決模糊決策的滯后性問題,設計了BP神經網絡PID變量噴霧系統。
(2)運用Matlab分別對3種控制策略進行建模仿真,結果表明,基于BP-PID控制的上升時間、超調量、穩態誤差分別為0.25 s、1.30%、±0.26%,明顯優于其他2種常規控制方式。
(3)在馬鈴薯大田中分別進行了神經網絡PID變量噴霧系統的動態流量跟隨試驗、流量控制精度試驗、縱向施藥均勻度試驗和沉積性能試驗。當車速在4~11 km/h范圍內隨機變化時,試驗實測噴霧量為151.9 L/hm2,與理論值相差1.3%,系統平均調節時間為0.72 s,平均超調量為2.1%;在進行田間行走試驗時,施藥控制誤差穩定在3%以內;當車速大于等于4 km/h時,施藥量控制誤差穩定在-5%~5%之間,且變異系數均小于6%;各速度下霧滴沉積數量標準差均小于1.4個/cm2,且霧滴沉積數量高于國家標準。說明所設計變量施藥系統縱向施藥均勻度較好、性能穩定。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2015年2期)2015-02-28 12:15:41
