播種機導種技術與裝置研究進展分析
2020-02-02 04:07:26廖宜濤李成良廖慶喜
農業機械學報 2020年12期
廖宜濤 李成良 廖慶喜 王 磊
(1.華中農業大學工學院, 武漢 430070; 2.農業農村部長江中下游農業裝備重點實驗室, 武漢 430070)
0 引言
播種是農業生產基礎環節,要求播量穩定、行距和株距均勻、播深穩定,播種質量對作物產量產生直接影響。種子的田間分布由行距、株距和播深組成的三維空間坐標值所決定[1]。傳統的人工播種方式作業效率低,難以保證穩定的行距、株距和播深;機械化方式播種作業效率高、均勻性好、出苗整齊,利于作物的田間管理和機械化收獲。精確行距、株距和播深的機械化精量播種方式是精準農業和智慧農業發展的技術基礎。
播種機按照農藝要求的播量和行株距將合格種子均勻播入一定深度的種溝內,并覆以適量的土壤鎮壓,具有多功能聯合作業的大中型、復合型播種機還可以同步完成耕整地、開溝、施肥等作業。播種機為種子萌發和植株個體、群體生長發育創造良好的環境和均勻空間,減輕了勞動強度,提高了生產效率和播種質量[2-4]。
播種機作業時,將種子由種箱運移至種床合理位置。在前處理環節,播種機土壤工作部件整理好種床和種溝。在播種環節,種箱內的種子群在排種器的作用下定量分離形成連續種子流,運移過程中的籽粒處于由混沌群體到有序單粒化階段,根據種子在排種器中的狀態可以分為充種、囊種、護種、卸種等環節;從排種器排出的種子經導種裝置約束落入種溝,形成滿足農藝要求的均勻株距分布,運移過程中的籽粒處于有序單粒化狀態保持階段,主要包括導種和投種環節。在后處理環節,播種機配套的覆土器、鎮壓輪等工作部件對種溝的種子進行覆土、鎮壓等作業。種子的運移過程是一個多環節串聯過程,任何環節都將直接影響種子田間分布均勻性。
機械化播種的技術核心是種群的有序單粒化和單粒化狀態保持,即精量排種技術和種子平穩運移技術[5]。精量排種技術是國內外學者研究的重點和熱點[4-6]。導種和投種環節作為播種過程中使種子保持均勻有序狀態入土的末端環節,對種子最終田間分布的均勻性具有重要作用。種子與導種裝置的碰撞及與種床土壤的彈跳滑移是破壞均勻有序運移狀態、并導致田間播種行株距不均的主要原因[7-8],研究導種裝置運移機理、進行結構創新設計對提高播種質量具有重要意義。
種子在空間具有沿3個直角坐標軸方向移動和繞3個坐標軸轉動的6個自由度。在導種過程中,導種裝置對種子運移過程每施加一個約束,種子運移自由度就減少一個,即種子運動的隨機性減小,播種均勻性提高。為避免種子在導種運移過程中因受到剪切作用而發生損傷,除大蒜等要求種子直立、鱗芽向上的作物播種對其轉動自由度有約束要求外[9],其他作物一般不需要施加轉動約束,給予種子一定的局部自由運動空間。
本文綜述國內外播種機導種技術與裝置的研究進展,對各類導種原理與導種裝置對種子運移的約束狀態進行分析,根據種子運移過程對自由度約束情況,將導種技術原理劃分為無約束導種、欠約束導種和全約束導種3種形式,對3種形式的導種原理與導種裝置優缺點及適用對象進行系統闡述與歸納,為播種機導種技術研究和導種裝置創新設計提供參考。
1 無約束導種研究進展
無約束導種是指種子脫離排種器到落入種床土壤過程僅受慣性力和重力的作用,運動過程不受任何約束,具備6個運動自由度。圖1是兩種典型的采用無約束導種原理的播種機,該類播種機采用芯鏵式播種開溝器,在機器前進時,由開溝器分開并隔離種床土壤,為排種器排出的種子流創造自由下落空間,種子在重力和離開排種器時的初始運動速度作用下落入種溝,再經過回流土壤和覆土裝置覆土,完成播種。應用該原理的播種機導種裝置結構簡單,常與種溝開溝器集成于一體,并將排種器與開溝器集成為一個工作單元。由于無約束導種時種子運移只受慣性力和重力作用,因此離開排種器時的投種高度和投種初始速度對排種均勻性有很大的影響,是研究重點[10-13]。
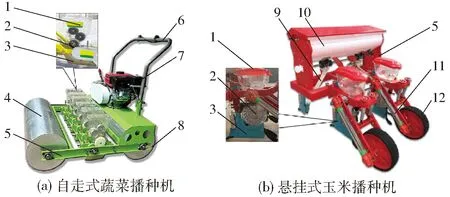
圖1 無約束導種播種機結構圖Fig.1 Structural charm of unconstrained seed guiding device planter1.種箱 2.排種器 3.開溝器 4.驅動輪 5.機架 6.手推把手 7.汽油機 8.后鎮壓輪 9.落肥管 10.肥箱 11.密封式傳動軸 12.橡膠輪
投種高度是投種口至種床土壤的垂直距離,根據排種器安裝位置可分為低位投種和高位投種,一般由排種器結構、導種形式、傳動方式以及整機結構共同決定[14]。投種高度越大,種子運移過程經歷的時間越長,落點不確定性越大,田間分布均勻性越差。張建平等[15]應用Monte Carlo(蒙特卡羅)方法模擬了氣吸式排種器播種大豆時投種高度對播種均勻性的影響,發現當投種高度小于20 cm時,隨投種高度增加,排種變異系數增長迅速;當投種高度大于20 cm時,隨投種高度增加,排種變異系數增長緩慢且逐漸趨近于固定值。研究結果證明,當投種高度過大,垂直地面的分速度增大,動能增大,落地與土壤接觸時的非彈性碰撞隨機性增加,種子落地后的運動處于隨機狀態,排種均勻性變異系數符合隨機統計規律。為提高播種均勻性,無約束導種常采用“低位投種”,即將排種器設計在靠近種床土壤的位置來降低投種點與種溝垂直高度,從而一定程度降低種子與種床土壤碰撞彈跳滑移。邢赫等[16-17]運用高速攝影研究水稻氣力式排種器的稻種在送種正壓作用下脫離排種盤后的軌跡以及投種成穴性,研究發現在水稻種子投種高度為15 cm以下時,種子運動時間短、隨機性低,投種高度對水稻成穴性影響不顯著。
奧地利Wintersteiger公司[18-20]研制的Monoseed TC型自走式小區單粒播種機,排種器為一對組合吸縫盤和驅動格輪,排種器與開溝器合為一體,通過盡可能降低投種高度緩解了種子與種床土壤的彈跳滑移,提高了播種精度,在很多國家和地區得到推廣使用。河北德易播農機發展有限公司研制的DB系列蔬菜播種機均采用無約束導種,通過芯鏵式開溝器隔離土壤,為排種器排出的單粒連續種子流創造無約束自由下落空間,投種高度小,低速低振動工況下播種均勻性較好[21]。
投種速度是投種時種子水平分速度和種子垂直地面分速度的合速度,一般由排種元件半徑、排種元件工作轉速、投種角度及型孔數量共同決定[14];投種絕對水平分速度是種子水平分速度和機具前進速度的合速度,是影響投種質量的主要因素[22-23];投種絕對水平分速度越大,種子與種床土壤碰撞時,水平方向的彈跳滑移現象就越嚴重,粒距均勻性和排種合格指數就越低。根據兩者關系可分為向前投種、向后投種和零速投種;當種子水平分速度與機具前進速度大小相等、方向相反時,兩者相互抵消,此時可視為零速投種[24]。以氣吸式馬鈴薯排種器[25-27]為例,當排種器轉速為25~31 r/min時,零速投種對排種質量影響較小;當排種器轉速為31~40 r/min時,零速投種可有效提高排種合格指數,降低變異系數。“反向投種”是實現零速投種的重要途徑之一,即對排種器排出的種子進行反向加速,獲得與播種機前進方向相反的慣性作用,平衡機組前進速度,減小種子落入種溝瞬間與種床土壤水平方向的彈跳滑移,提高種子落點準確性。如采用正壓氣流對氣吸式馬鈴薯排種器[25-27]排出的種子沿播種機前進方向反向加速,結合具體作業速度,并準確調節正壓氣流的大小和投種時的正壓氣室位置,達到理論零速投種,在排種器工作轉速為35 r/min時,排種合格指數為95.22%,相比于非零速投種提高6.13個百分點。
綜合分析可知,無約束導種裝置結構簡單,但因對種子運動無自由度約束,受投種高度和投種初速度影響,存在種子運動隨機性大、種子落點準確性差的情況,通過“低位投種”和“反向投種”可一定程度提高播種均勻性。無約束導種主要適用于粒徑較大、質量較大、農藝要求株距較高的大中粒徑種子播種,如馬鈴薯、玉米等,其自由導種過程不易被種子自由下落空間內的空氣、機器的振動等干擾破壞;當應用于小粒徑種子播種時,如圖1a的手推自走式蔬菜播種機,僅在低速、低振動工況下作業質量好。
2 欠約束導種研究進展
欠約束導種狀態下種子脫離排種器到落入種床土壤過程中施加一定的約束,進而使種子在導種過程中具有相對固定的運移軌跡,主要方式是在排種器卸種口增設導種管,利用導種管的曲線構造來約束種子運移自由度,規劃種子運動軌跡、落地速度和角度,并使導種管出口盡可能接近種溝進行低位零速投種。該方式既可降低種子與種床土壤彈跳滑移現象,又可預留足夠空間安裝仿形機構或播深調節機構,便于播種機的設計與整體布局。導種管材料要有足夠的彈性和伸縮性,以適應開溝器升降、同步仿形和株距調整[2]。導種管類型有塑料波紋軟管、塑料光滑軟管、塑料硬管、橡膠波紋軟管、金屬卷片管、蛇皮管等[28],目前應用最廣泛是塑料波紋軟管、塑料硬管和塑料光滑軟管。
根據種子在導種管內運移過程的主要作用力,可以分為重力式導種和氣送式導種。重力式導種是指種子僅受重力牽引從排種器口滑落到種溝內,在導種管內會與約束其運動的管壁發生摩擦、碰撞等作用;在沿導種管下滑時,運移曲線斜率必須大于種子與管道的摩擦因數,且運移過程要保證種子有足夠的動能;因此其運移過程動能變化、規劃設計合理導種路徑是重力式欠約束導種技術的研究重點。氣送式導種是種子受重力牽引,并同時在導種管內氣流裹挾作用下運移到種溝內,適應于寬幅播種機,種子通常處于懸浮狀態,運動主要受導種管內氣流場的影響,因此導種管內氣流輸送速度、壓力損失、氣流場均勻穩定是氣送式欠約束導種技術的研究重點。
2.1 重力式欠約束導種
重力式導種是目前應用最廣的欠約束導種技術,導種過程中,種子與導種管內的摩擦、碰撞越劇烈,種子運移無序程度越高,播種均勻性越低。KOCHER等[29]以美國John Deere公司的高速氣吸播種機為研究對象,以球形種子和扁平形種子為研究對象,對比新導種管和粗糙度更大的舊導種管,發現更換新導種管可以使播種精度提升20%以上。國內外農機學者結合理論分析、數值模擬、臺架試驗及高速攝影等手段和方法開展了動力學能量損耗、投種均勻性影響因素、導種管結構設計、種子運移規律和土壤與種子接觸過程等方面相關研究。
ENDRERUD[30]運用種子在導種管運動時的動力學能量變化規律,以種子在導種管內投送過程動能損耗最小為目標,對導種管內種子投送影響因素進行了探究,研究表明:當導種管傾斜角為90°時,即導種管與水平面垂直時,動能損耗最大;當導種管傾斜角為45°時,導種管直徑對能量損耗無影響;當導種管傾斜角為60°時,導種均勻性最佳。廖慶喜等[31]以玉米種子為研究對象,通過臺架試驗發現導種管直徑對排種性能影響顯著,當導種管直徑為22 mm、長度為500 mm、導種管傾斜角為60°時,可保證較高的播種均勻性。劉建英等[32]利用離散元對導種管施加直線運動和正弦振動,對玉米種子經導種管落入土壤的過程進行模擬,模擬結果表明:當免耕播種機作業速度為1.389 m/s時,最佳導種管高度為500 mm。
高速攝影技術可在短暫曝光的時間內精準捕捉物體高速運動過程[33-35],為種子運移規律研究、導種管結構設計和導種管布置方式確定提供手段和依據。于海業等[36]通過高速攝影觀察小麥種子在排種口處、導種管內及脫離導種管到著地過程3個階段的運動狀態,發現種子在導種管內的運動存在滑動、滾動和滑動兼滾動3種隨機狀態,主要以滑動運動為主,且存在運動速度趨于一致的一段滑動范圍。
排種器轉速對種子卸種軌跡存在影響。王樂等[37]基于高速攝像技術對不同排種器轉速下玉米種子落入導種管口位置及在導種管中運動軌跡進行研究,表明排種器轉速對種子投送軌跡和種子落地水平位移存在顯著性影響。李渤海等[38]應用EDEM軟件模擬玉米種子在導種管內的運動情況,并利用高速攝影技術得出不同排種盤轉速下種子的不同運動軌跡,研究結果表明:隨排種盤轉速的增加種子的水平方向位移逐漸增加,當轉速大于27 r/min時,種子水平位移出現大幅度的偏移。王金武等[39-40]運用高速攝影捕獲了玉米種子投種運移規律,試驗結果表明:當工作轉速為15~45 r/min、傾斜角為0°時,種子正面及側面軌跡水平位移隨工作轉速增加而增加;當工作轉速大于35 r/min時,種子軌跡及落點位置分布逐漸離散;在工作轉速為30 r/min、傾斜角為-12°~12°時,軌跡投種角隨傾斜角的增加而減小。王磊[41]、余佳佳等[42-43]對不同形式的正負氣壓組合式排種器開展高速攝像試驗,發現種子以一定初速度離開排種器后的運動軌跡曲線為空間拋物線,投種位移和投種速度隨著卸種正壓增大而增大。因此導種管的設計要符合種子卸種運動軌跡,根據不同工況下投種軌跡曲線設計特殊的導種管曲線軌跡和結構來約束種子運移路徑,避免種子因劇烈碰撞改變有序運動次序,并實現零速投種,通常采用塑料成型工藝制作成傾斜曲線式、截面漸縮的方管型導種管。
圖2為美國John Deere公司[44]免耕播種機及配套導種管,該導種管為傾斜曲線式結構,導種截面上寬下窄呈漸縮趨勢,排種器排出的種子在重力作用下沿導種管內壁滑落,配置于導種管內側的光電傳感系統可同步檢測重播及漏播情況。圖3所示為德國Horsch公司[45-46]MAESTRO SW型氣吸式精密播種機配套導種管,同樣采用傾斜曲線式結構,導種截面也呈現上寬下窄漸縮趨勢;內側設有光電傳感器可同步檢測重播及漏播情況,實現單粒精密播種。對于具有復雜曲線結構的導種管應用逆向工程手段重構其三維幾何模型,相對傳統的理論計算和試驗研究,可縮短導種管的設計周期,降低設計成本[47]。
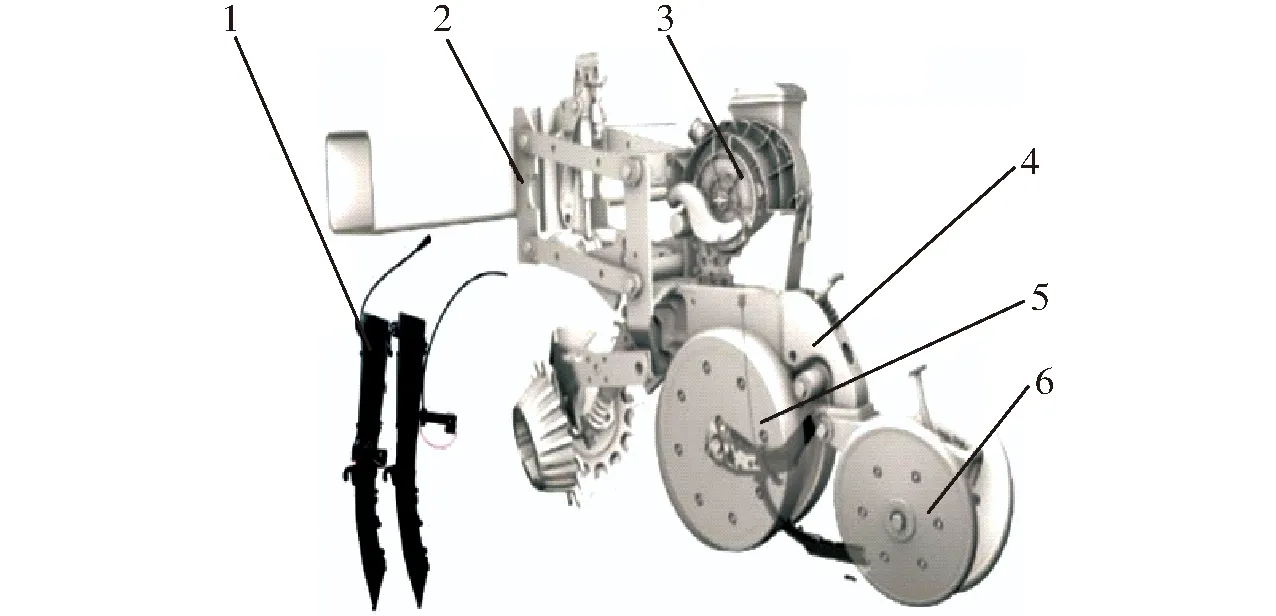
圖2 免耕播種機及配套檢測導種管Fig.2 No-tillage planter and matching detection seed guiding tube1.導種管 2.仿形機構 3.排種器 4.機架 5.開溝器 6.鎮壓機構
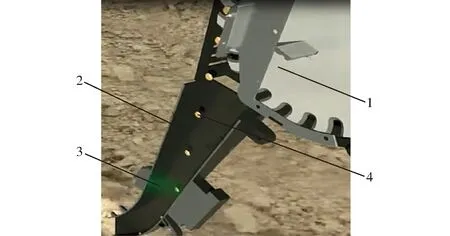
圖3 Maestro SW型精密播種機配套檢測導種管Fig.3 Matching detection seed guiding tube for Maestro SW type precision planter1.排種器 2.導種管 3.光電傳感器 4.種子
雙段式導種管通過合理曲線構造可減小種子與導種管壁的彈跳碰撞且保證種子具有合適的落地速度和角度。楊文彩等[48]基于零速投種理論將傳統直段式導種管改進成雙段式導種管,該導種管由直線段和圓弧段組成,配置于2BQ-28型三七精密播種機,解決了播種不均勻、不穩定的問題。仲云龍等[49]設計了一種配套于旋耕滅茬施肥播種聯合作業機的雙段式導種管,根據連續拋投形成拋物線原理將導種管前段曲線設計為下凹拋物線,減小種子與管壁的碰撞;根據最速降線原理將導種管后段曲線設計為擺線,使種子在導種管內滑行時間最短,同時又具有合適的落地角度和落地速度;通過臺架試驗得出播種均勻性變異系數最高為13.2%,播種均勻性較好。李玉環等[50]通過分析原導種管投種過程玉米種子下落情況,提出了一種利用推種裝置實現直線投種的方法,設計的直線投種原理排種器與配套導種管如圖4所示,減少了玉米種子與導種管壁的碰撞,提高了高速作業播種質量。
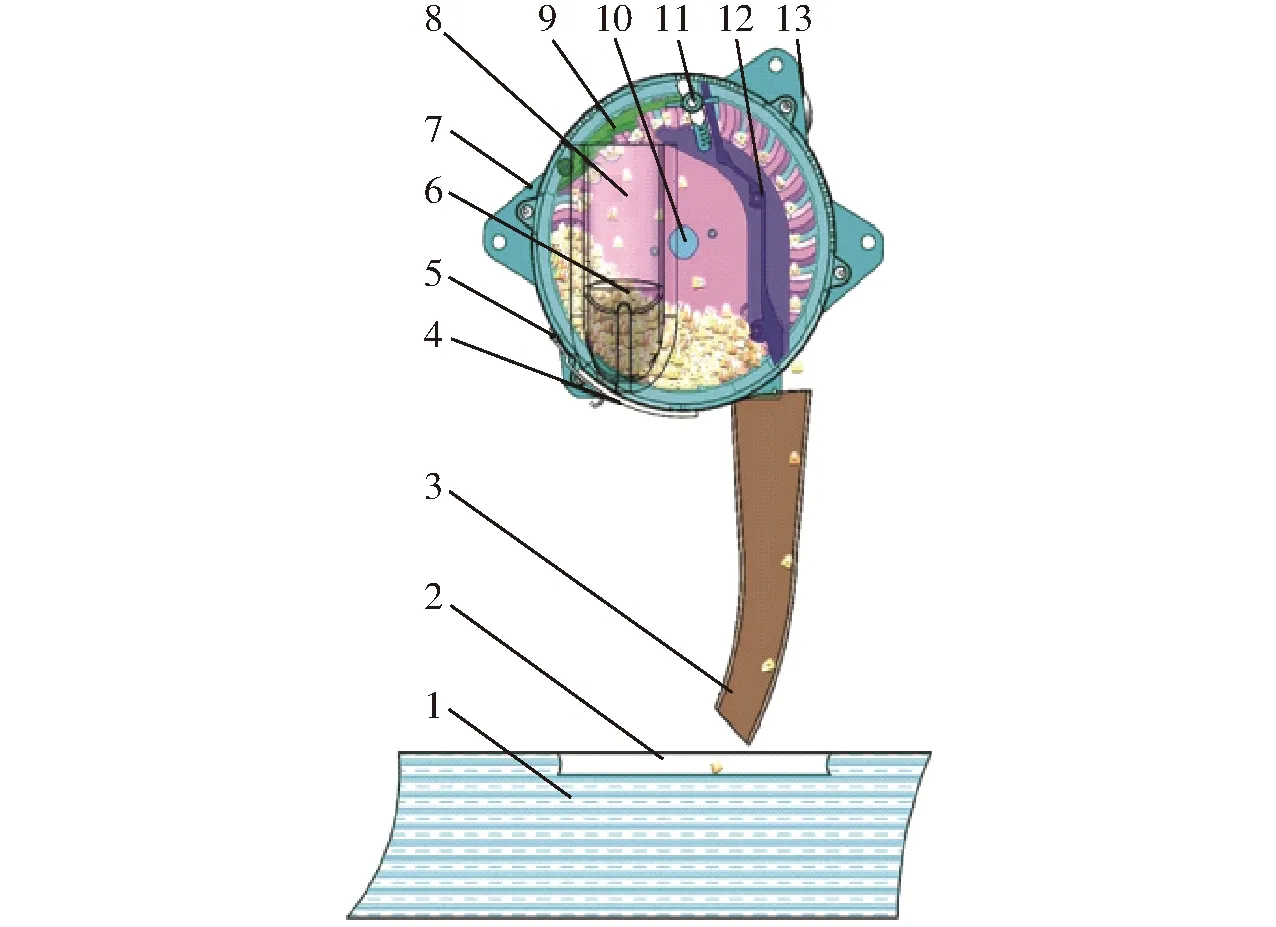
圖4 氣吸式高速精量排種器直線投種過程示意圖Fig.4 Diagram of linear seeding process of high speed precision metering device with air suction1.土壤 2.種溝 3.導種管 4.卸種擋板 5.快卸裝置 6.前殼體 7.后殼體 8.種盤 9.清種機構 10.傳動軸 11.清種調節裝置 12.推種裝置 13.進氣口
重力式導種管可一定程度上限制種子運移自由度,但隨著播種機作業速度的增加,由于導種管自身局限性、種子入射角差異大,實際生產中播種機存在顛簸起伏振動等因素,需考慮種子在導種管內運動隨機性和種子飛出導種管的運動軌跡隨機性等問題。
2.2 氣送式欠約束導種
氣送式導種涉及氣力輸送技術,是氣力式播種機的核心[51],其通過正壓氣流對導種管內種子運移自由度進行柔性約束,進而減少種子與導種管壁的隨機碰撞。氣送式導種技術根據種子分配原理主要分為直接氣送式和分配氣送式,導種管內部涉及氣固兩相流輸送理論及隨機過程理論,種子在導種管內運動狀態復雜,通常設計成細長的塑料光滑軟管。
氣送式導種管直徑對氣力輸送系統工作狀態影響顯著。過小的導種管管徑會導致額外的壓力損失,引起氣流波動或阻塞,過大的導種管管徑會導致氣流穩定性差且能耗大,選擇合適的導種管直徑對提高氣送式導種管性能具有重要意義。YATSKUL等[52]建立了氣送式播種機氣力輸送系統的設計方法,提出了一種計算壓力損失的理論計算方法,指出了導種管參數是影響氣力輸送系統的首要因素;以小麥、肥料及小麥肥料混合物作為研究對象,分別在管徑為20、25、30 mm 三水平下進行對照試驗,建立了氣流速度、輸送濃度及導種管管徑之間的關系,指出了理想的導種管管徑。Horsh、Kuhn和John Deere等國外農機企業常采用的氣送式導種管直徑為20~30 mm[52]。
氣送式導種管氣流輸送速度是影響氣力輸送系統工作狀態的重要因素之一。過高的氣流速度會增加導種管中種子破碎率,導致種子發芽率和抗病性下降,過低的氣流速度會增加導種管堵塞風險[51-53]。導種管氣流輸送速度與種子破碎率呈冪次相關[54-55],選擇合適的氣流輸送速度范圍對于提高氣送式導種管性能具有重要意義,目前常采用的氣流輸送速度為18~24 m/s[52]。何有璋[56]使用7類種子、12種導種管進行試驗,探究各類種子在各種導種管內的運動規律和影響導種均勻性的因素,發現氣流速度與種子輸送速度的關系曲線為上凹單增的;對于懸浮速度高的大而重型種子可采用20 m/s左右或更高的氣流輸送速度;對于懸浮速度低的小而輕型種子可采用17 m/s左右或更低的氣流輸送速度。
2.2.1直接氣送式導種
直接氣送式導種技術主要采用“排種器精量排種+氣力輸送”,氣流裹挾著種子通過導種管,降低了種子碰撞無序的風險,具有作業速度快、播種均勻性好、機具振動對排種影響小等優點。德國Amazone公司[57-58]研制的EDX系列高速精密播種機結構如圖5所示,采用正壓氣流輸送式導種方式,氣力滾筒式排種器可實現“一器多行”排種,排出的種子在正壓吹力的作用下沿導種管內壁快速滑落入土壤,種子與導種管壁碰撞少,播種均勻性好,導種效率高,可實現低位投種和同步仿形,最高作業速度可達15 km/h。英國Ferguson公司[59]研制的MF543型機架式通用播種機,導種管同樣采用正壓氣流輸送式導種方式。祁兵等[60-61]根據集中排種和氣送導種原理,設計了一種中央集排氣送式玉米精量排種器,采用正壓氣流輸送式導種方式,氣力滾筒式排種器可實現“一器多行”排種,排種裝置通過直接固定于機架實現與仿形機構的分離,排種器振動小,播種均勻性好且對高速作業有較好的適應性。
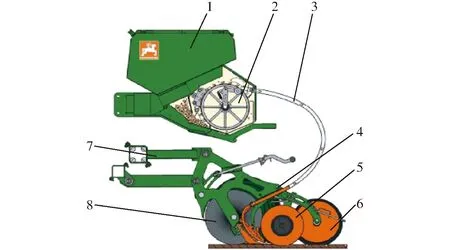
圖5 EDX系列高速精密播種機結構圖Fig.5 Structural charm of EDX series high-speed precision planter1.種箱 2.滾筒式排種器 3.氣送式導種管 4.機架 5.仿形驅動輪 6.覆土鎮壓輪 7.仿形機構 8.雙圓盤開溝器
瑞典Vaderstad公司[62]研制的Tempo系列玉米精量播種機導種過程采用正壓氣流彈射投種技術,通過氣流約束使種子快速通過導種管投射入種床土壤,導種過程如圖6所示,可適用于高速作業且播種精度高,最高作業速度可達20 km/h。意大利Maschio Gaspardo公司[63]研制的CHRONO型高速精密播種機(圖7)和荷蘭Lockwood公司[64]研制的馬鈴薯氣吸交錯式播種機,導種過程均采用正壓氣流彈射投種技術。王超等[65]設計了一種氣動式小麥精準投種裝置,該裝置根據引射器原理設計而成,在高速氣流的沖擊作用下將種子從加速管中高速推入土壤,完成小麥高速精準投種作業,播種均勻性好。
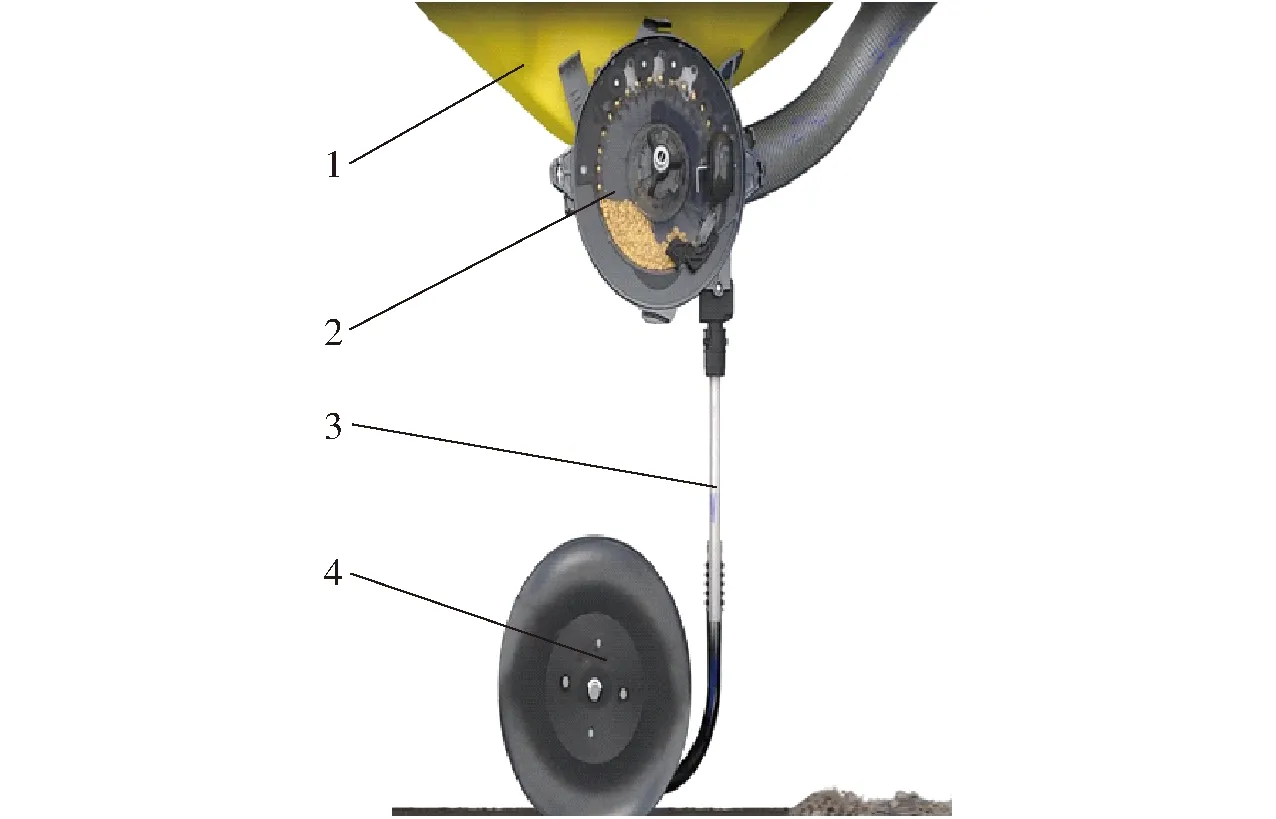
圖6 Tempo系列玉米精量播種機氣流投射導種裝置Fig.6 Tempo series corn precision planter air flow projection seed guiding device1.種箱 2.排種器 3.氣送式導種管 4.覆土鎮壓輪
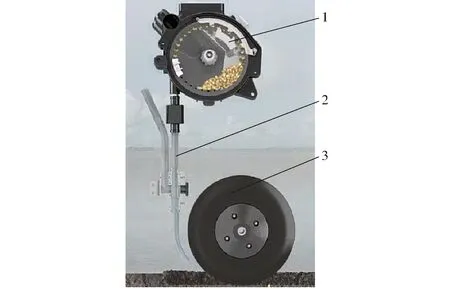
圖7 CHRONO型高速精密播種機氣流投射導種裝置Fig.7 CHRONO type high-speed precision planter air flow projection seed guiding device1.排種器 2.氣送式導種管 3.覆土鎮壓輪
直接氣送式導種技術通過正壓氣流對導種管內種子運移自由度進行再約束,種子處于懸浮狀態,降低了種子碰撞無序的風險,可實現播種單體的同步仿形、低位投種,一器多行遠距離輸送寬幅播種,具有作業速度快、播種均勻性好、機具振動影響小等優點。
2.2.2分配氣送式導種
分配氣送式導種技術主要采用“機械定量供種+氣流分配成行+氣力輸送”形式,可實現“一器多行”,具有作業幅寬大、作業速度快、適用范圍廣等優點,已在美國、法國、德國、意大利等發達國家得到大規模推廣使用[66-69],代表機型主要包括:德國Amazone公司[70]生產的Citan大型氣送式精量播種機(圖8a)、德國Lemken公司[71]生產的Solitair系列氣送式精量播種機(圖8b)、法國Kuhn公司[72]生產的Maxima系列氣送式精量播種機(圖8c)和意大利Maschio Gaspardo公司[73]生產的Pinta系列氣送式精量條播機(圖8d)等。

圖8 國外分配氣送式播種機Fig.8 Foreign air-assisted distribution planter
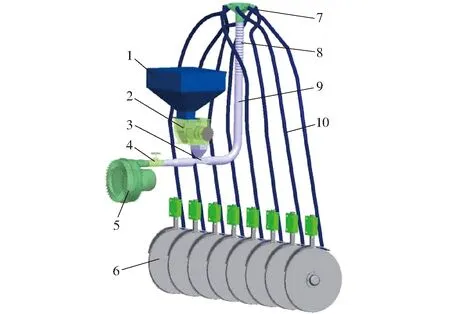
圖9 氣送式集排器示意圖Fig.9 Structure of air-assisted centralized metering device1.種箱 2.供種裝置 3.供料裝置 4.氣壓調節閥 5.風泵 6.雙圓盤開溝器 7.分配器 8.增壓管 9.輸種管道 10.導種管
張曉輝團隊[74-77]連續多年對氣送式集排系統開展研究工作,研制出2BQ-10型氣流一階集排式排種系統。劉立晶等[78-79]通過改進國外氣送式集排系統,研制出2BMG-24Q型氣流輸送式小麥免耕播種機。農業部南京農業機械化研究所[80-81]研制的2BDZQ-33800型氣力集排式水稻直播機,其配有的基于電驅控制的氣力集排系統采用“集中排種+氣流均勻分配”形式,可實現“一器33行”作業,排種效率高。
雷小龍等[82-83]針對氣送式集排器(圖9)具有較長導種管和氣流擾動影響種子運動軌跡的問題,分析了導種管材料、直徑、長度組合、角度布置、氣流壓強等因素對排種性能的影響。李衍軍等[84]通過分析氣送式排種系統導種管長度與導種管內氣流流速的關系,得到了不同長度導種管管內氣流速度流場分布圖及種子量分布圖,為解決不同長度導種管導致排種性能不佳等問題提供了理論依據。
分配氣送式導種技術與直接氣送式導種技術導種運移自由度約束機理基本相同,具有作業幅寬大、作業速度快、適用范圍廣等優點。相比于重力式導種管,作業質量和播種效率大大提高,主要用于油菜、水稻、小麥和玉米等作物大中型寬幅高速播種機。但易受前序分配環節種子狀態與氣流狀態的影響,保證形成的均勻的氣固耦合流平均分配到各行導種管內是分配氣送式導種技術研究的重點和難點。
3 全約束導種研究進展
全約束導種是指通過新型導種裝置對種子離開排種器后的運移進行全自由度約束或者進行僅具有局部自由度的全約束,強制種子保持其有序狀態,是一種保證播種粒距均勻分布的主動式導種方式,可有效避免因播種機振動和其他原因導致的種子與導種管壁、種床土壤產生“碰撞異位”和“彈跳異位”,常見的方式有帶式導種和點播式導種等。
3.1 帶式全約束導種
帶式導種是目前先進的全約束導種技術之一,其通過輸送帶將種子從排種器出口單粒有序運移至低位進行投種。美國John Deere公司[85]研制的John Deere 2015系列毛刷帶式導種裝置,其配套播種單體結構如圖10所示,可通過調節毛刷帶的轉速使種子落入土壤瞬間的水平分速度與播種機前進速度相近且反向,相互抵消實現零速投種。美國Precision Planting公司[86]研制的SpeedTube型輸送帶式導種裝置,其結構如圖11所示,安裝于排種器卸種口處,通過撥指的旋轉運動將排種器排出的種子運送至輸送帶上,在輸送帶的轉動下將種子輸送至底部并導入種床土壤,可通過調整輸送帶轉速保證種子達到最佳投種狀態,最高作業速度可達20 km/h。

圖10 John Deere 2015系列播種單體Fig.10 John Deere 2015 series seeding monomer1.覆土鎮壓輪 2.機架 3.毛刷帶式導種裝置 4.排種器 5.雙平行四連桿同步仿形機構
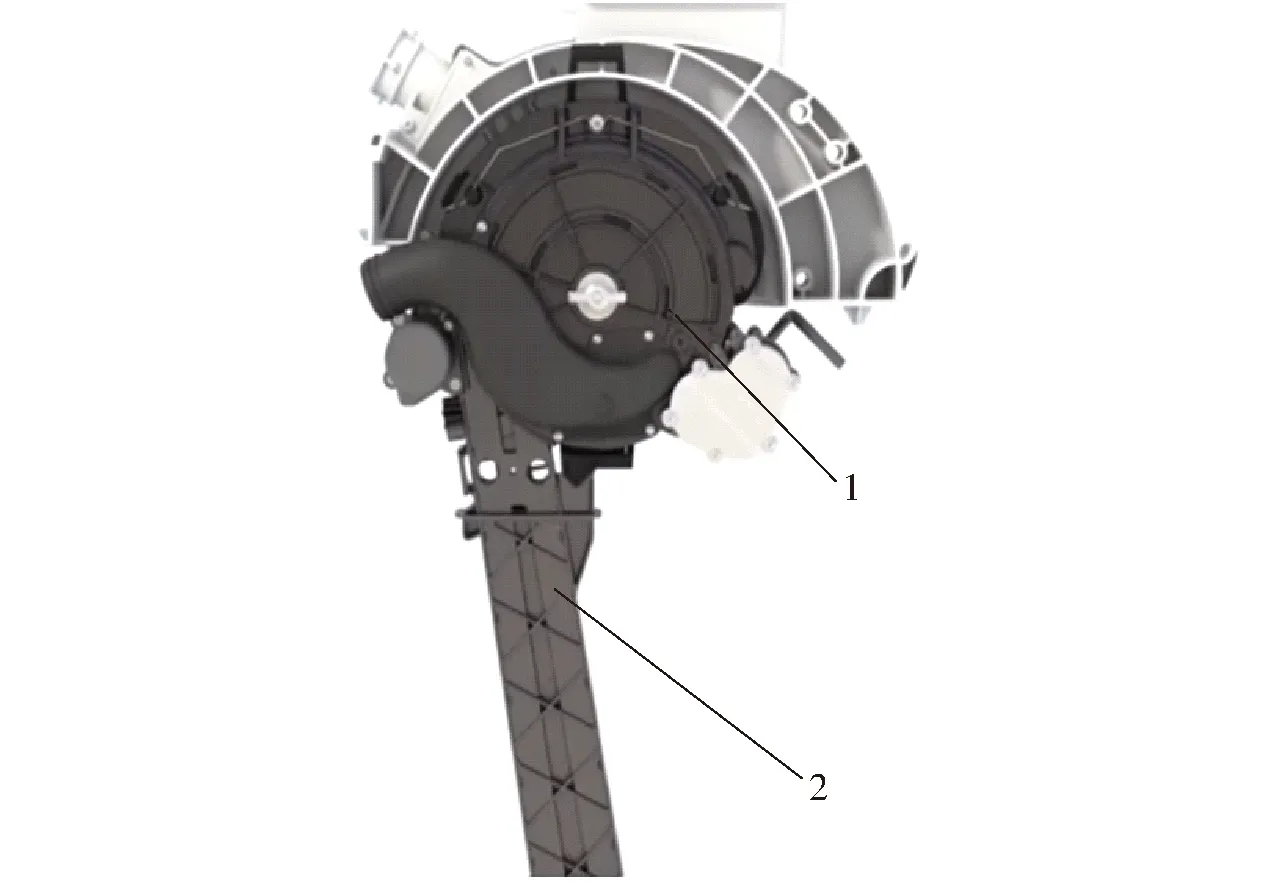
圖11 SpeedTube型輸送帶式導種裝置Fig.11 SpeedTube type conveyer belt seed guiding device1.排種器 2.輸送帶式導種裝置
陳學庚等[87]、康建明等[88]針對免耕播種機雙圓盤式開溝器投種點高的問題,設計了一種傳動與投種機構一體的帶式導種裝置,使種子進入由輸送帶與種道護板形成的輸種腔內,從而沿著預定軌跡運動至投種位置,完成投種。陳晨[89]設計了一種精量播種機帶式導種裝置,該導種裝置通過螺栓固定在排種架上,通過排種軸驅動導種裝置傳動,在導種帶隔腔的約束下將種子單粒平穩輸送至種床土壤,有效降低了投種高度,提高了播種精度。劉全威[90]提出了一種精準取種、平穩輸種和精準投種的播種技術,設計了一種撥指同步帶式導種裝置,種子在推種板的作用下從排種器型孔落入導種裝置的輸種腔,在撥指同步帶和護種板的作用下將種子強制有序輸送至種床土壤,可實現精準投種。王希英等[91-92]改進設計了一種雙列交錯勺帶式馬鈴薯精量排種器,排種器工作過程主要分為充種、運移、清種、導種和投種 5 個串聯階段。工作時,取種凹勺單粒取種,柔性排種帶的相鄰種勺與導種護罩間形成封閉空間,種薯被運移至投種點拋送瞬間由于離心力突變進行零速投種,避免種薯拋甩,提高了播種均勻性。
帶式導種裝置可縮短種子自由運動行程,降低種子運移過程中的碰撞風險,保證從排種器排出種子的均勻有序狀態,能夠滿足精密播種機的高速作業。為避免導種過程中種子發生剪切損傷,帶式導種裝置通常將種子約束在一個輸種腔內,給予種子一定局部自由運動空間。
3.2 點播式全約束導種
點播式排種器是通過鴨嘴、穴播器等裝置將種子運移至土壤深處進行播種,屬于全約束的種子運移。趙建托等[93]設計了一種玉米全膜覆蓋直插式播種裝置,采用凸輪和曲柄機構控制成穴器,可實現播種時間段內成穴器水平絕對速度為零。趙武云等[94]設計了一種玉米全膜雙壟溝直插式精量穴播機,采用凸輪-曲柄滑塊機構和運動放大機構控制成穴器投種,可實現成穴器播種段和出土段水平分速為零。戴飛等[95-96]將轉動導桿機構與正弦機構串聯,運用近等速補償機構與放大機構相配合實現零速投種。石林榕等[97]設計了一種玉米直插穴播機強排-強啟排種裝置,利用共軛凸輪實現鴨嘴取種和投種,利用前進速度補償機構來抵消投種水平分速度,保證零速投種,大大減少了種子與種床的彈跳滑移。
侯加林等[98-100]設計了一種行星輪鴨嘴式大蒜插播機,其結構如圖12所示,采用星輪式鴨嘴插播機導種裝置,在導種鴨嘴的護送下將大蒜種子精準直立插入土壤,播種質量高。李復輝等[101]設計了一種舵輪式玉米免耕精量施肥播種機,該播種機的關鍵工作部件為舵輪勺盤式穴播器,其既充當行走輪又充當排種器,播種質量較好,但不適用于高速作業,播種效率較低。劉俊孝等[102]提出一種氣力吸種、定點打穴、精準投種的點播方式,設計了一種針孔管式小麥精準點播裝置,其結構如圖13所示,關鍵工作部件針孔吸種管兼具取種、導種和投種的功能,播種均勻性好。
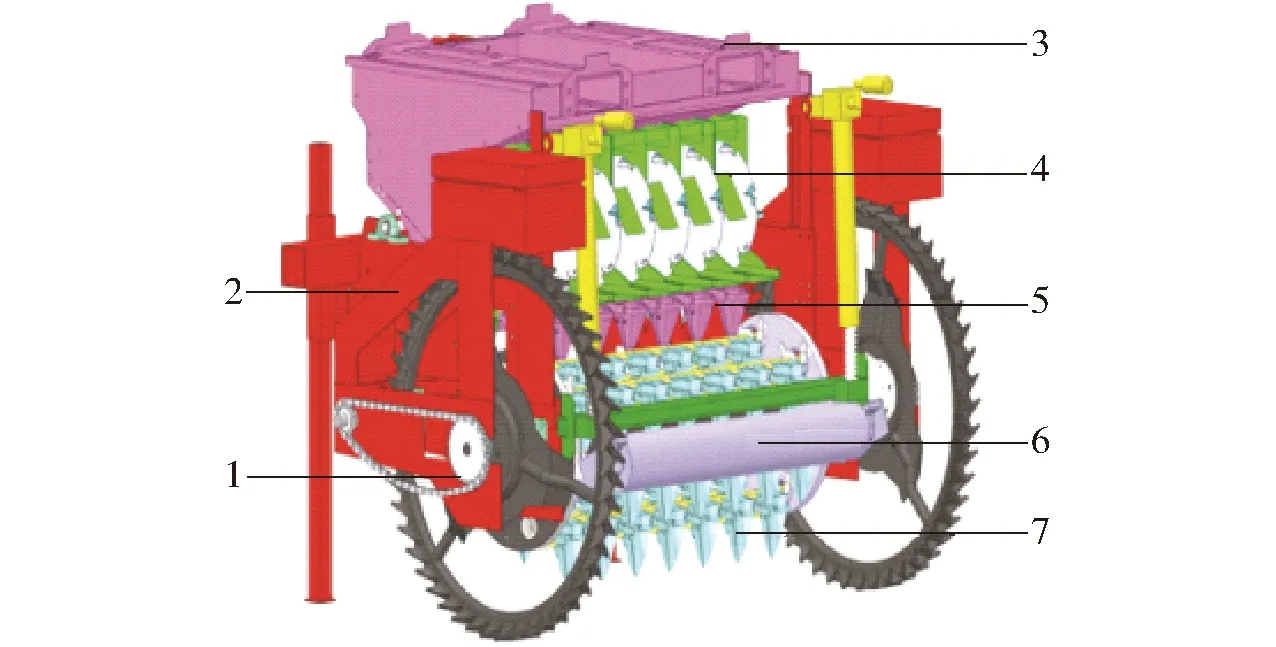
圖12 行星輪式大蒜插播機示意圖Fig.12 Structure of planetary wheel garlic planter1.傳動系統 2.機架 3.種箱 4.排種裝置 5.接種鴨嘴 6.壓平輥 7.插播裝置
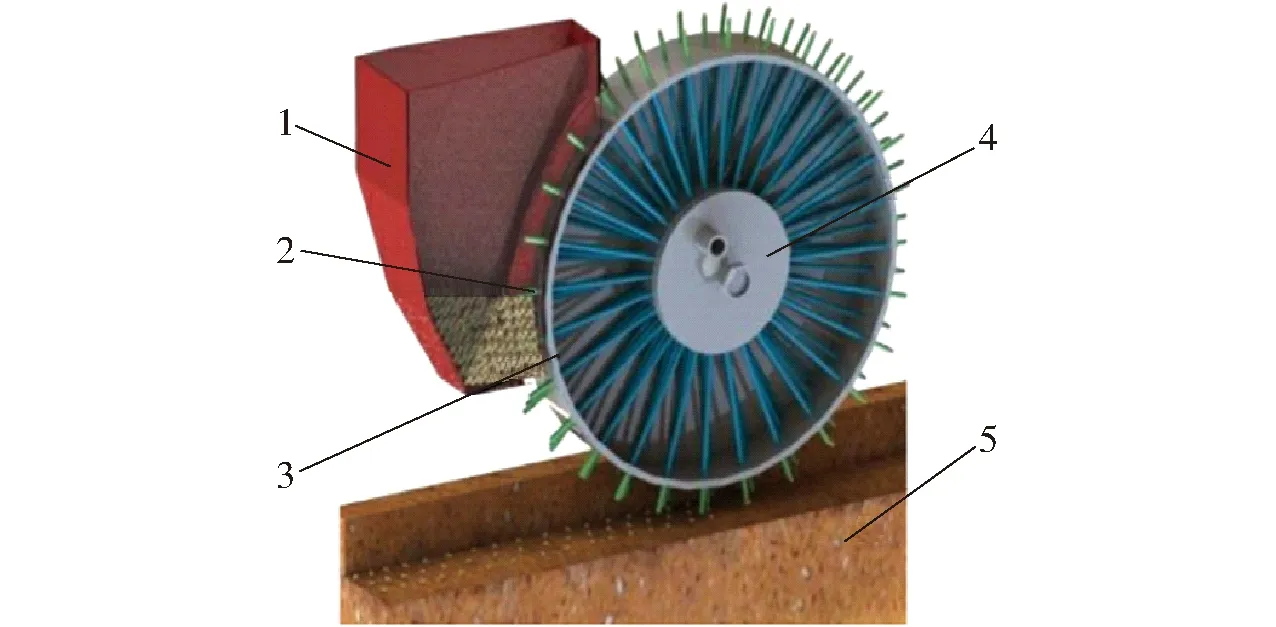
圖13 針孔管式小麥精準點播裝置示意圖Fig.13 Structure of pinhole-tube wheat precision seeding device1.種箱 2.針孔吸種管 3.播種輪 4.氣力分配機構 5.土壤
點播式導種裝置采用點播式將種子插播至適宜播深的種床土壤,在土壤的摩擦力和回流作用下消除種子落入種床土壤的彈跳滑移現象,可適用于穴播、鋪膜播種等低速作業。
4 技術特色分析
播種機導種裝置的結構和種類繁多,根據種子運移過程的自由度約束狀態,可以分為無約束導種、欠約束導種和全約束導種3種技術原理,3種技術原理各有其技術特點和適用對象,其特點總結概括對比如表1所示。其中無約束導種和重力式欠約束導種裝置結構相對簡單;氣送式欠約束導種裝置導種運移穩定性較高,需要輔助配氣系統;全約束導種裝置對種子進行自由度約束強制有序運移,有效解決了種子投送過程的碰撞異位和彈跳異位現象,大大提高了播種質量和播種均勻性,符合精密播種要求,但在一定程度上增加了系統復雜性。
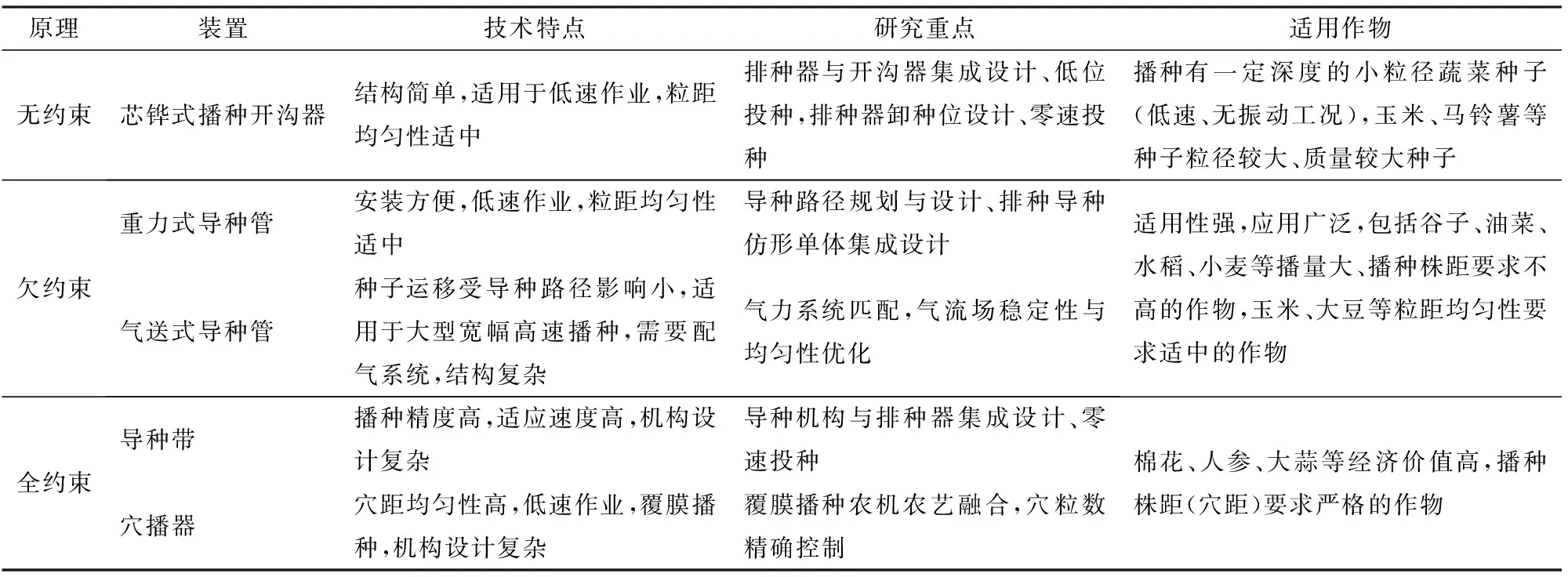
表1 不同導種技術原理特點對比Tab.1 Comparison of characteristics of different seed guiding technology principles
改進導種裝置,提升導種性能的方法主要有兩種:基于零速投種理論,通過對種子進行反向加速,盡量平衡機組前進速度,減小種子落入種溝瞬間的水平分速度,減少了種子與種床的接觸碰撞與滑移,無約束導種技術主要以該理論為指導;通過導種裝置(導種管、導種帶、鴨嘴、穴播器等)來限制種子從排種器排出到落入種床土壤過程的運動軌跡,減小種子運動隨機性,降低投種高度,從而提高播種均勻性,欠約束和全約束導種技術主要利用該方法。
5 展望
隨著農業機械化技術發展和機械化水平提升,大型化、高速化、精密化、自動化和智能化已成為播種機發展的方向。國內外學者圍繞提高播種質量和效率為目標,對多種形式的導種裝置結構進行創新和優化。通過對國內外各類導種技術與裝置的研究現狀分析,結合機械化播種發展趨勢,總結導種技術與裝置的發展方向如下:
(1)導種環節作為播種過程中保持均勻有序狀態入土的末端環節,承接排種器排出的有序種子流,決定種子最終田間分布的均勻性,無約束、欠約束和全約束導種技術各存在優缺點和適用條件,未來應堅持三者并存發展。種子在導種、落入種床過程中都存在隨機的振動和碰撞影響,在機械化播種技術研究中,應根據種子田間均勻性統計規律探討實際生產條件下各類導種方式與裝置對種子有序運移狀態的影響程度。種子離開導種裝置時的投種速度是播種串聯環節末端環節,“零速投種”,即種子接觸種溝瞬間絕對速度趨近于零可以避免種子的隨機彈跳[103],是國內外導種技術與裝置研究的理論依據和最終目標,未來應繼續深入研究和應用“零速投種”理論,如通過虛擬仿真技術和高速攝影等技術研究種子,特別是中小粒徑種子與土壤的碰撞過程,以播種機“零速投種”為目標創新設計排種器與配套導種裝置。
(2)對于播種粒距均勻性要求不嚴格的作物,推薦應用結構簡單、適用性強的無約束或重力式欠約束導種裝置,主要研究導種裝置的無約束空間結構及其與排種裝置的集成設計、欠約束導種裝置對種子動能的影響及導種路徑合理設計。對于采用集排式排種器、作業幅寬大、種子運移距離較遠、運移路徑受局限的播種機,應重點開展適用的氣送式欠約束導種裝置研究。對于播種精度要求高的作物,當種子質量和粒徑較大時,種子有序運移狀態不易受干擾破壞,可以采用無約束導種裝置,在排種器性能研究基礎上,進一步開展與種溝開溝器、覆土鎮壓機構集成化設計,通過結構優化降低投種高度和投種速度;對于精密播種中小粒徑種子或種子著床方向有特定要求的作物,應采用全約束主動導種裝置,未來需要創新導種方式和結構,提高導種頻率,以提升精密播種作業速度。
(3)播種技術核心為種群有序單粒化和單粒化狀態保持,即精量排種技術和平穩運移技術,研究適應于不同區域、不同種植模式、不同種植作物的播種機、排種器及配套導種裝置,應農機農藝相結合,增強播種機、排種器及配套導種裝置的通用性;并加強新型短程精密播種技術研究,如開發氣吸點播式精密排種器、多連桿單粒精密排種導種機構等,實現精量排種技術與平穩運移技術相融合。
(4)利用信息化手段實現播種機的智能化是播種領域技術發展趨勢和研究熱點,播種工作狀態監測、播種量檢測和種子田間分布信息檢測是播種關鍵信息。導種裝置是種子落入種床的末端通道,是安裝檢測器的理想載體,與導種裝置集成、準確可靠地檢測種子信息是研究的重點,小粒徑種子、異常的多粒聚集種子及大播量作物種子的檢測是研究難點。通過實時探測種子運移時間間隔判斷前端排種器工作狀態,對異常情況進行警報處理,統計計算播種量是智能播種機對播種信息的應用方向;未來可以進一步通過對種子導種、投種時間進行延遲補償,獲得田間更精準的種子分布信息,結合種子出苗、成苗信息,探索不同機械化耕播方式、種床條件、種肥土壤關系下的機械化播種勻苗全苗壯苗指數,評價播種機作業性能、作業質量,并研制基于成苗信息預測的一播全苗智能播種裝備,實現機械化播種高產穩產群體智能化構建。
