基于足底壓力感知的身份識(shí)別系統(tǒng)
2020-02-02 03:37:12李漢林李潔劉天宇
電子技術(shù)與軟件工程 2020年16期
關(guān)鍵詞:單片機(jī)
李漢林 李潔 劉天宇
(濱州學(xué)院 航空工程學(xué)院 山東省濱州市 256600)
近年來(lái)隨著計(jì)算機(jī)處理能力的提高與人工智能的興起,使步態(tài)識(shí)別作為一種非侵入識(shí)別方式的識(shí)別準(zhǔn)確性不斷提高,其非接觸性,不易察覺(jué),也使被測(cè)人員很難進(jìn)行偽裝。科學(xué)醫(yī)學(xué)研究發(fā)現(xiàn),人的步行姿態(tài)包括二十多種特征,且受到多種生理因素影響,如果全面考慮這些因素,每個(gè)人的步態(tài)都是不同的。通常基于機(jī)器視覺(jué)的步態(tài)識(shí)別的輸入數(shù)據(jù)是很多幀步行的圖像序列,因?yàn)闄C(jī)器視覺(jué)所用到的算法模型對(duì)算力要求較高,處理困難,且容易受到很多外界因素干擾[1],比如:環(huán)境光線(xiàn),拍攝角度,衣服鞋帽等都會(huì)影響人體輪廓。本項(xiàng)目采用的壓力感知方式的步態(tài)識(shí)別實(shí)現(xiàn)方法簡(jiǎn)易,直觀(guān),在繼承步態(tài)識(shí)別的優(yōu)點(diǎn)同時(shí)可以有效地的避免上述問(wèn)題。所有本文設(shè)計(jì)一種基于步態(tài)識(shí)別的足底壓力感知人員身份識(shí)別系統(tǒng)。
1 系統(tǒng)結(jié)構(gòu)與功能
本身份識(shí)別系統(tǒng)由壓力傳感模塊,STM32F4 單片機(jī),紅外喚醒模塊,上位機(jī)等器件組成,結(jié)構(gòu)示意圖如圖1所示。
1.1 采集設(shè)備結(jié)構(gòu)
考慮到步態(tài)識(shí)別方式的特性,充分發(fā)揮步態(tài)識(shí)別的優(yōu)勢(shì),采集裝置采用嵌入地面設(shè)計(jì),具有隱蔽性,不易察覺(jué),如圖2所示。
1.2 壓力傳感模塊
通過(guò)柔性薄膜壓力傳感器橫縱分布式交叉排布構(gòu)建出來(lái)的400個(gè)采樣點(diǎn),采集行走過(guò)程中腳掌的壓力變化生物數(shù)據(jù),進(jìn)行數(shù)據(jù)采集。通過(guò)大量程應(yīng)變式稱(chēng)重傳感器測(cè)量人體體重信息。如圖3所示。
柔性薄膜壓力傳感器的阻值R 隨著受力F 的增大而減小,設(shè)計(jì)電路通過(guò)STM32F4 單片機(jī)測(cè)量讀取薄膜壓力傳感器的電壓值,傳感器的電壓值因?yàn)殡娮柚档淖兓兓Mㄟ^(guò)單片機(jī)收集柔性薄膜壓力傳感器各個(gè)節(jié)點(diǎn)數(shù)據(jù)變化,得到行走過(guò)程中腳掌的壓力變化,量化壓力變化數(shù)據(jù)。可以測(cè)量出足底各個(gè)位置的壓力值,柔性薄膜壓力傳感器壓力與電阻曲線(xiàn)如圖4[3]。
1.3 STM32F407VET6單片機(jī)
STM32F407VET6 芯片具有低功耗,高性能的優(yōu)點(diǎn),芯片最高運(yùn)行頻率168MHz,12 位數(shù)模轉(zhuǎn)換器,符合設(shè)計(jì)要求,使用STM32F407VET6 進(jìn)行模擬信號(hào)采樣,STM32F407 VET6 單片機(jī)將采樣信號(hào)進(jìn)行預(yù)處理,封裝通過(guò)串口發(fā)送給上位機(jī)。
1.4 紅外喚醒裝置
考慮到功耗及元器件壽命等原因,使用紅外光電開(kāi)關(guān)對(duì)是否有人員出入進(jìn)行檢測(cè)。無(wú)人員進(jìn)出時(shí)單片機(jī)處于休眠狀態(tài),當(dāng)檢測(cè)到人員進(jìn)出時(shí)喚醒單片機(jī)。
1.5 上位機(jī)
在上位機(jī)搭建軟件算法,使用足底壓力分布及變化作為步態(tài)信息,對(duì)識(shí)別模型進(jìn)行訓(xùn)練從而實(shí)現(xiàn)對(duì)人員的鑒別。

圖1:系統(tǒng)結(jié)構(gòu)示意圖

圖2:采集設(shè)備結(jié)構(gòu)圖

圖3:壓力傳感器
2 壓力數(shù)據(jù)特征提取
根據(jù)H.奈奎斯特提出的采樣定理,必須當(dāng)采樣頻率大于被測(cè)量的模擬信號(hào)最大頻率兩倍以上時(shí),采樣數(shù)據(jù)才能完全顯示原信號(hào)的特征。相關(guān)調(diào)查表明人體運(yùn)動(dòng)頻率一般不高于 30Hz,本系統(tǒng)按照人體活動(dòng)頻率不高于 30Hz,設(shè)計(jì)對(duì)足底壓力傳感器采樣頻率為80Hz[2]。通過(guò)上位機(jī)從單片機(jī)獲取的數(shù)據(jù),擬合出足底壓力分布圖像,并使用opencv 庫(kù)對(duì)足底壓力分布圖像進(jìn)行處理。如圖5所示。

圖4:壓力KG 與電阻KOhm 變化曲線(xiàn)

圖5:足底各區(qū)域的壓力分布圖

圖6:足底區(qū)域劃分
2.1 數(shù)據(jù)處理
為了確保提取到的足底壓力圖像的完整性,防止因接觸傳感器位置的邊緣導(dǎo)致壓力圖像的不完整而導(dǎo)致測(cè)量結(jié)果錯(cuò)誤。本設(shè)計(jì)設(shè)定足底長(zhǎng)寬比的上限與下限,當(dāng)壓力圖像不在此范圍時(shí)排除該壓力圖像。
2.2 足底區(qū)域劃分
根據(jù)計(jì)算壓力圖像有參數(shù)的行與列,算出足部長(zhǎng)和寬的像素點(diǎn)的個(gè)數(shù),分別記為r 和c。依照列數(shù)r 等分為三等份,記為r1,r2,r3,分別對(duì)應(yīng)各部分的有效行數(shù)。如圖6所示。

圖7:不同人員步態(tài)特征變化曲線(xiàn)
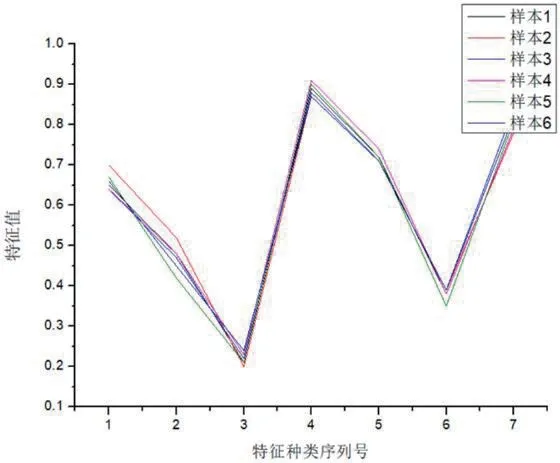
圖8:同一人員步態(tài)特征變化曲線(xiàn)
2.3 壓力分布特征提取
2.3.1 形狀特征
根據(jù)人腳的生理特點(diǎn),通常使用腳與地面的接觸面積和足底長(zhǎng)寬比來(lái)反映被測(cè)人員足底的形狀特征。壓力圖像的有參數(shù)的行與列,計(jì)算足部長(zhǎng)的行數(shù)和寬的列數(shù),足底各區(qū)域的長(zhǎng)和寬是指足底各區(qū)域中有壓力參數(shù)行數(shù)和有壓力參數(shù)列數(shù)。足底的接觸面積是指足底中有壓力參數(shù)的像素點(diǎn)的個(gè)數(shù)。
2.3.2 最大壓力圖像
由于人在行走時(shí),足底接觸地面的過(guò)程為動(dòng)態(tài)過(guò)程,因此當(dāng)不同人員腳從接觸地面到離開(kāi)地面的壓力曲線(xiàn)都會(huì)不同,從中選取壓力最大的圖像的最大壓力像素點(diǎn)。將整個(gè)足底與傳感器接觸區(qū)域受力使人前進(jìn)的力集中于特定區(qū)域,該區(qū)域就是足底壓力中心點(diǎn)。一般情況下,足底壓力中心點(diǎn)位于足底中間部分靠近內(nèi)側(cè)的位置。由于不同人肌肉力量骨骼長(zhǎng)度腳型的不同,足底壓力中心點(diǎn)的位置也會(huì)有很大的不同[4]。足底壓力中心點(diǎn)計(jì)算公式(1),(2)。


圖9:系統(tǒng)流程圖
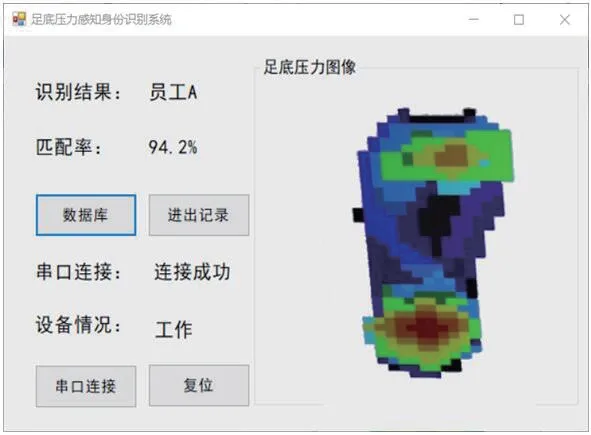
圖10:系統(tǒng)軟件界面圖
Xi和Yi為提取壓力圖片上的像素點(diǎn)的行數(shù)與列數(shù),Pi為提取壓力圖片上當(dāng)前讀取像素點(diǎn)的壓力值,n 為該壓力圖像中矩陣像素個(gè)數(shù),Xc和Yc分別為足底壓力中心點(diǎn)的行數(shù)和列數(shù)[3]。
2.3.3 時(shí)空參數(shù)
設(shè)定從一只腳接觸傳感器瞬間到另一只腳接觸傳感器瞬間所用時(shí)間為行走周期,支撐時(shí)間為在一個(gè)行走周期內(nèi)一只腳與傳感器接觸的時(shí)長(zhǎng),因?yàn)閭€(gè)人的生理差異都會(huì)有所不同[5]。
3 識(shí)別算法設(shè)計(jì)
目前步態(tài)識(shí)別的方法大多是基于模式識(shí)別的判斷方法。隨著人工智能算法的發(fā)展,基于模式識(shí)別的判斷方法準(zhǔn)確性越來(lái)越高,但現(xiàn)在模式識(shí)別常用算法無(wú)一不需要大量的測(cè)試樣本對(duì)分類(lèi)器進(jìn)行訓(xùn)練,獲得較好的識(shí)別效果[6]。由于本系統(tǒng)的實(shí)際應(yīng)用場(chǎng)景問(wèn)題,無(wú)法獲得被測(cè)試人員的大量樣本。所以我們嘗試設(shè)計(jì)出具有普適性的步態(tài)識(shí)別算法。來(lái)實(shí)現(xiàn)對(duì)于測(cè)試人員錄入的單一樣本也能獲得較好的識(shí)別準(zhǔn)確率。對(duì)不同人員的樣本進(jìn)行特征提取,將提取的所有足底壓力特征進(jìn)行歸一化處理,得出實(shí)驗(yàn)數(shù)據(jù)如圖7,8 所示。
特征值序號(hào):1 接觸面積,2 足底長(zhǎng)寬比,3 最大足底壓力像素點(diǎn),4 足底壓力中心點(diǎn),5 行走周期,6 支撐時(shí)間,7 體重。
實(shí)驗(yàn)發(fā)現(xiàn)不同人員的足底壓力中心點(diǎn),支撐時(shí)間,足底接觸面積三個(gè)足底壓力特征在數(shù)值上有較大波動(dòng),賦予較高的識(shí)別優(yōu)先級(jí),根據(jù)各個(gè)特征數(shù)據(jù)波動(dòng)幅度的大小,依次進(jìn)行優(yōu)先級(jí)排序,再根據(jù)優(yōu)先級(jí)對(duì)識(shí)別算法各特征的權(quán)重進(jìn)行調(diào)整。達(dá)到當(dāng)測(cè)試人員只錄入一次本人足底壓力樣本,之后對(duì)未知樣本進(jìn)行判斷的要求。
4 系統(tǒng)總體設(shè)計(jì)
系統(tǒng)總體流程圖如圖9所示。
當(dāng)有人員通過(guò)時(shí),系統(tǒng)被紅外喚醒裝置喚醒,檢測(cè)人員足底壓力信息,與數(shù)據(jù)庫(kù)已有模型進(jìn)行匹配,進(jìn)行人員身份識(shí)別。系統(tǒng)軟件如圖10。
5 結(jié)語(yǔ)
本項(xiàng)目設(shè)計(jì)一種基于物聯(lián)網(wǎng)研發(fā)的一套足底壓力感知身份識(shí)別系統(tǒng),通過(guò)薄膜壓力傳感器,采集行走過(guò)程中腳掌的壓力變化生物數(shù)據(jù),通過(guò)大量程應(yīng)變式稱(chēng)重傳感器測(cè)量人體體重信息。將信號(hào)傳輸給STM32F4 單片機(jī),然后STM32F4 單片機(jī)將數(shù)據(jù)封裝發(fā)送給上位機(jī),上位機(jī)搭建軟件算法,使用足底壓力分布及變化作為步態(tài)信息,設(shè)計(jì)識(shí)別算法,采集出入人員的腳掌壓力分布及變化趨勢(shì),從而實(shí)現(xiàn)對(duì)人員身份進(jìn)行鑒別,同時(shí)通過(guò)其出入時(shí)的體重及步態(tài)的微小變化,分析人員是否攜帶異常物品。本系統(tǒng)基于步態(tài)識(shí)別的足底壓力感知人員身份識(shí)別系統(tǒng),步態(tài)平均識(shí)別率達(dá)到89.2%,可以在20 個(gè)樣本存量中實(shí)現(xiàn)準(zhǔn)確識(shí)別。本項(xiàng)目采用的壓力感知方式的步態(tài)識(shí)別實(shí)現(xiàn)方法簡(jiǎn)易,直觀(guān),在繼承步態(tài)識(shí)別的優(yōu)點(diǎn)同時(shí)有效地的避免了步態(tài)識(shí)別對(duì)算力要求較高,環(huán)境對(duì)識(shí)別結(jié)果影響較大的問(wèn)題。在步態(tài)識(shí)別領(lǐng)域具有一定的實(shí)用性和研究?jī)r(jià)值。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
- 電子技術(shù)與軟件工程的其它文章
- 大數(shù)據(jù)時(shí)代計(jì)算機(jī)信息處理技術(shù)
- 計(jì)算機(jī)網(wǎng)絡(luò)安全中虛擬網(wǎng)絡(luò)技術(shù)的應(yīng)用
- 計(jì)算機(jī)網(wǎng)絡(luò)系統(tǒng)滲透測(cè)試技術(shù)
- 滲透測(cè)試在網(wǎng)絡(luò)安全等保測(cè)評(píng)中的運(yùn)用
- 大數(shù)據(jù)技術(shù)在網(wǎng)絡(luò)安全分析中的應(yīng)用
- 大數(shù)據(jù)技術(shù)應(yīng)用下的網(wǎng)絡(luò)安全分析與實(shí)踐路徑