上肢康復機器人自適應離散滑模控制
2020-01-16 07:40:00王婕李榮利張高巍郭士杰
河北工業大學學報 2020年6期
王婕 李榮利 張高巍 郭士杰

摘要 針對上肢外骨骼系統的非線性和不確定性特點,提出了一種基于增強型趨近律設計的自適應離散滑模控制方法。首先,建立5自由度上肢康復系統離散模型,便于計算機直接對外骨骼進行控制。然后,采用冪函數、指數函數和差分函數設計了增強型趨近律,保證跟蹤誤差的快速收斂。基于離散模型和增強型趨近律,設計了自適應離散滑模控制器。自適應控制可實現對控制增益的在線調節,減小準滑動模態的邊界層厚度,抑制外部干擾影響和滑模抖振。基于Lyapunov穩定理論,分析了所設計的控制器對閉環系統的穩定性,并對控制效果進行了仿真驗證。
關 鍵 詞 外骨骼;趨近律;離散滑模控制;自適應控制;軌跡跟蹤
中圖分類號 TP242.6? ? ?文獻標志碼 A
Abstract In order to solve the problems caused by nonlinearity and uncertainty in the motion control of the upper extremity exoskeleton system, an adaptive discrete sliding mode control scheme has been proposed based on an enhanced reaching law. First, a discrete model of a five-degree-of-freedom upper limb rehabilitation system is established to make it convenient for a computer to perform control directly. Then, an enhanced reaching law is designed by utilizing the power function, the exponential function as well as the difference function to ensure a fast convergence of tracking errors. Based on the discrete model and the enhanced reaching law, an adaptive discrete sliding mode controller is designed. The control gains are regulated online and the boundary-layer of quasi-sliding mode is reduced by utilizing the adaptive control method. Furthermore, the influence of external disturbances and chattering are suppressed. The stability of the controller in the closed-loop system that simulates a five-degree-of-freedom upper limb rehabilitation system is analyzed by using Lyapunov stability theory and the control performance is confirmed by simulation.
Key words exoskeleton; reaching law; discrete sliding mode control; adaptive control; trajectory tracking
0 引言
外骨骼機器人是一種可穿戴的智能機電裝置,可為穿戴者提供助力,使其能夠完成繁重的體力勞動,也可用作醫療康復裝置,通過體重支撐或動作輔助改善肢體殘障人員的活動能力,或對神經障礙患者進行康復訓練,具有重要的軍事、勞動作業、醫療應用價值,是目前機器人領域的研究熱點。外骨骼與穿戴者構成典型的人機共融系統,具有變量多、非線性強、不確定性大等特點,易受機械誤差、信號傳感誤差及外部干擾等因素的影響。為保證人機動作的協調性,外骨骼的設計不但要在運動學與動力學上與人體匹配,還要具備人機交互能力和自適應能力,以確保穿戴者的安全與舒適。常用的外骨骼控制策略包括操作者控制、肌電控制、預編程控制、主從控制、直接力反饋控制、地面反作用力控制、靈敏度放大控制等。但不管采用哪種控制策略,末端運動控制多采用最優控制[1]、魯棒控制[2]、PID控制[3]等方法,這些方法對于非線性多自由度上肢外骨骼的運動控制,有一定的局限性,無法實現人機之間的無縫協調。
本文所研究的上肢外骨骼機器人是一個單臂5自由度系統。對于5自由度機械臂的非線性控制問題,文獻[4]提出了一種PID控制和迭代學習控制相結合的控制方法,用于機械臂執行重復任務,該控制方法對于周期信號的處理具有較好的效果,但非周期運動的誤差累積會嚴重影響系統的動態特性。為提高系統的響應能力,實現快速跟蹤和克服系統外部干擾,文獻[5]設計了一種基于遺傳算法的滑模控制器。文獻[6-7]提出了非線性自適應控制策略,能夠使執行器在不確定性干擾下實現較好的動態跟蹤,但需設計離散滑模控制器,以保證信號采集的可靠性和精度。然而,傳統的離散滑模控制器抖振難以避免,為解決這一問題,很多學者進行了研究。文獻[8]設計了一種基于指數趨近律的離散自適應滑模控制器,采用連續函數替代符號函數,降低控制抖振。文獻[9]以5自由度外骨骼機器人為研究對象,設計了一種無模型自適應滑模控制器,使機器人系統在不確定條件下實現對期望軌跡的跟蹤。文獻[10]提出了一種自適應滑模控制方法,可有效降低抖振,但該方法收斂時間長,實時性較差。
針對傳統方法在非線性、不確定系統的運動控制中所存在的問題,以及離散滑模控制的抖振和收斂速度慢等問題,本文通過將離散滑模控制與自適應控制相結合,設計一種基于自適應離散滑模的增強趨近律,該趨近律采用冪函數、指數函數和差分函數,以實現跟蹤誤差的快速收斂。當輸出的關節位置遠離滑模面時,控制增益變大;當關節位置狀態接近滑模面時,控制增益減小,從而達到既快速響應,又降低抖振的目的。
1 機器人動力學方程的轉換及其動態線性化
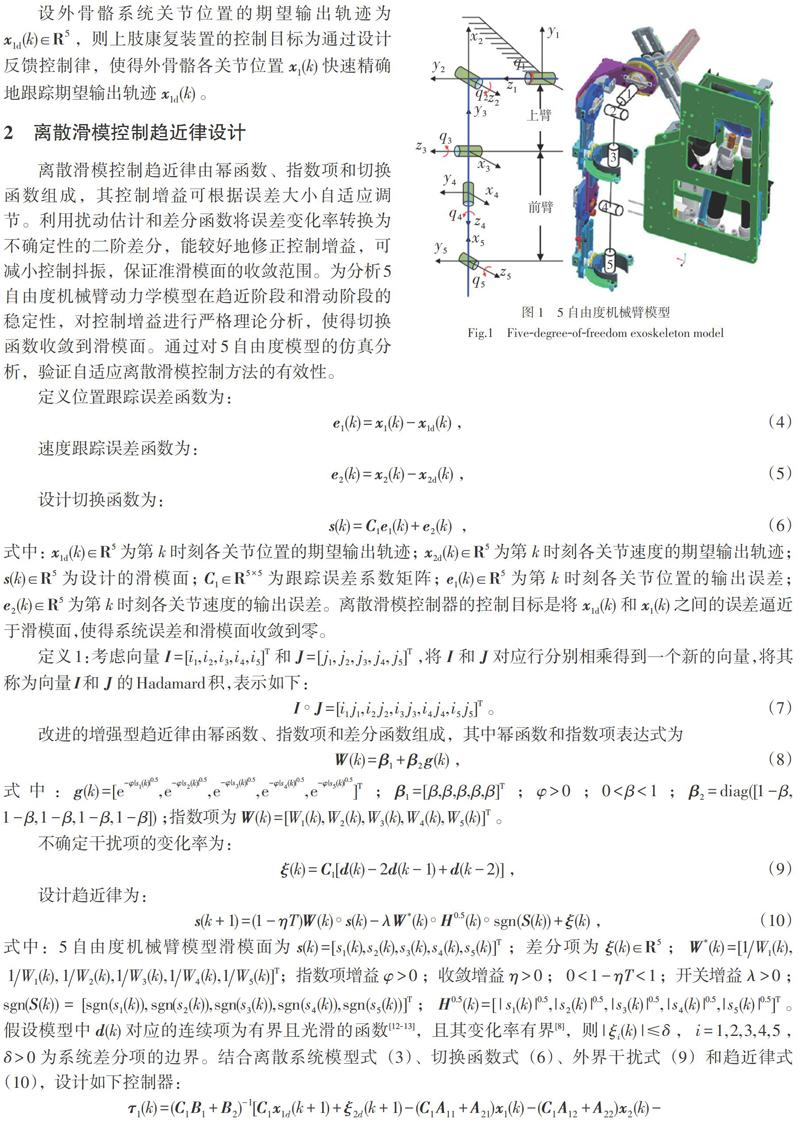
根據人體上肢運動規律和解剖學原理,上肢外骨骼機器人可選取5個關節,即肩關節的外展內收,肩關節的屈伸,肘關節的屈伸,腕關節的屈伸,以及腕關節的內旋外旋。具體結構如圖1所示。外骨骼系統的基本工作原理是通過獲得人體手臂運動信號,實時調整機械臂各個關節的力矩位置和角度,實現對手臂運動的快速精確跟蹤。該5自由度剛性機械臂系統的標稱動力學方程描述為如下模型[11]:
將式(1)非線性機器人標稱動力學方程轉換為如下狀態空間表達式:
此狀態空間方程表示在控制輸入[τ]的作用下,系統輸出各關節的位置、速度和加速度。控制系統的采樣周期為0.001 s,將系統式(2)線性離散化,并引入由模型不確定參數和外部擾動組成的總干擾矩陣,則離散后的狀態方程為
設外骨骼系統關節位置的期望輸出軌跡為[x1d(k)∈R5],則上肢康復裝置的控制目標為通過設計反饋控制律,使得外骨骼各關節位置[x1(k)]快速精確地跟蹤期望輸出軌跡[x1d(k)]。
2 離散滑模控制趨近律設計
離散滑模控制趨近律由冪函數、指數項和切換函數組成,其控制增益可根據誤差大小自適應調節。利用擾動估計和差分函數將誤差變化率轉換為不確定性的二階差分,能較好地修正控制增益,可減小控制抖振,保證準滑模面的收斂范圍。為分析5自由度機械臂動力學模型在趨近階段和滑動階段的穩定性,對控制增益進行嚴格理論分析,使得切換函數收斂到滑模面。通過對5自由度模型的仿真分析,驗證自適應離散滑模控制方法的有效性。
3 離散滑模控制趨近律的穩定性分析
3.1 離散滑模控制趨近律的可達性
離散滑模控制趨近律的到達條件為
3.2 離散滑模控制趨近律的穩定性條件
3.2.1 滑模裕度外的收斂性分析
當離散模型式(3)處于距離滑模面[Δnn]外的衰減帶時,通過分析以下2種情況,推得滿足系統收斂的條件,得出較小的準滑動模態的裕度。
3.2.2 滑模裕度內的收斂性分析
通過對比式(10)和式(30),可知基于冪函數和指數項的趨近律能夠自動調節控制增益,在距滑模面較遠時,控制增益相對較大;在靠近滑模面時,控制增益較小,此時冪函數和指數項失效,控制器將轉為傳統的滑模趨近律控制方法。
圖2為外骨骼系統各關節位置跟蹤軌跡圖。由圖可知,在自適應離散滑模控制律[τ(k)]的作用下,外骨骼系統關節位置曲線[x1(k)]能夠在0.02 s內實現對期望軌跡[x1d(k)]的準確跟蹤。因此,本文所提出的控制律能夠保證外骨骼系統在干擾存在的情況下對期望軌跡的快速準確跟蹤。
為了進一步說明所提控制方法的收斂性能,圖3給出了各關節位置的跟蹤誤差曲線。由圖3可知,各關節跟蹤誤差在0.02 s以后維持在零附近,且誤差在0.02內。表明閉環系統具有良好的動態性能和穩態精度。
5 結論
論文采用動態線性化方法將5自由度非線性機器人動力學模型線性化,結合自適應控制和滑模控制設計了自適應離散滑模控制器,基于冪函數、指數項和差分函數設計趨近律對系統的穩定性進行了嚴格分析。5自由度模型仿真結果表明,在不確定干擾存在的情況下,能夠使得上肢外骨骼系統快速精確跟蹤期望軌跡,且具有較好的動態響應性能,可最大限度地按照穿戴者的意愿完成手臂各關節運動。具有以下2個主要特點。
1)本文采用離散滑模控制器,能夠將計算機仿真直接應用于實際工程中,省略離散化過程。此外,建立5自由度離散模型,在系統受采樣頻率的限制時,可緩解系統狀態反復穿越滑模面產生的抖振,系統控制精度高、可靠性好。
2)與傳統的趨近律相比,基于冪函數、指數項和差分函數設計的增強型趨近律能減小準滑動模態的裕度,加快收斂速度。利用離散滑模控制和自適應控制相結合的方法,保證魯棒性的同時,降低了控制抖振,使得控制器具有較好的跟蹤性能。
參考文獻:
[1]? ? HUNT K J,MUNIH M,DE N DONALDSON N. Feedback control of unsupported standing in paraplegia:part I:optimal control approach[J]. IEEE Transactions on Rehabilitation Engineering,1997,5(4):331-340.
[2]? ? HUNT K J,JAIME R P,GOLLEE H. Robust control of electrically-stimulated muscle using polynomial H∞ design[J]. Control Engineering Practice,2001,9(3):313-328.
[3]? ? YU W,ROSEN J. A novel linear PID controller for an upper limb exoskeleton[C]//Decision and Control (CDC),2010 49th IEEE conference:IEEE,2011:3548–3553.
[4]? ? BALASUBRAMANIAN S,WEI R,PEREZ M,et al. An exoskeleton robot for assisting rehabilitation of arm functions[C]//Virtual Rehabilitation. Piscataway,New York:IEEE,2008:163-167.
[5]? ? BABAIASL M,GOLDAR S N,BARHAGHTALAB M H,et al. Sliding mode control of an exoskeleton robot for use in upper-limb rehabilitation[C]// RSI International Conference on Robotics and Mechatronics ICROM. Piscataway,New York:IEEE,2015:694-701.
[6]? ? MA H J,YANG G H. Adaptive logic-based switching fault-tolerant controller design for nonlinear uncertain systems[J]. International Journal of Robust and Nonlinear Control,2011,21(4):404-428.
[7]? ? JIN X Z,YANG G H. Robust adaptive fault-tolerant compensation control with actuator failures and bounded disturbances[J]. Acta Automatica Sinica,2009,35(3):305-309.
[8]? ? DU H B,YU X H,CHEN M Z Q,et al. Chattering-free discrete-time sliding mode control[J]. Automatica,2016,68:87-91.
[9]? ? 李醒,王曉峰. 不確定機器人系統無模型自適應滑模控制方法[J]. 南京理工大學學報(自然科學版),2015,39(6):655-660.
[10]? LIU J,LI H W,DENG Y T. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J]. IEEE Transactions on Power Electronics,2018,33(4):3655-3671.
[11]? 劉金琨. 機器人控制系統的設計與MATLAB仿真[M]. 北京:清華大學出版社,2008.
[12]? XU Q S,LI Y M. Micro-/nanopositioning using model predictive output integral discrete sliding mode control[J]. IEEE Transactions on Industrial Electronics,2012,59(2):1161-1170.
[13]? ABIDI K,XU J X,YU X H. On the discrete-time integral sliding-mode control[J]. IEEE Transactions on Automatic Control,2007,52(4):709-715.
[14]? SU W C,DRAKUNOV S V,OZGUNER U. An O(T/sup 2/) boundary layer in sliding mode for sampled-data systems[J]. IEEE Transactions on Automatic Control,2000,45(3):482-485.
[15]? 劉金琨. 滑模變結構控制MATLAB仿真[M]. 北京:清華大學出版社,2005.
[16]? KANG H B,WANG J H. Adaptive control of 5 DOF upper-limb exoskeleton robot with improved safety[J]. ISA Transactions,2013,52(6):844-852.
[責任編輯? ? 付? ? 婷? ? 田? ? 豐]
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
