基于AMESim與ADAMS的抓臂式清污機工作裝置聯合仿真研究
2020-01-15 06:26:58
液壓與氣動 2020年1期
(1.合肥工業大學機械工程學院, 安徽合肥 230009; 2.安徽省六安恒源機械有限公司, 安徽六安 237000)
引言
清污機是一種專門用于泵站攔污柵前,對水中污物進行清理的水利機械設備。隨著水環境的變化,水體中的污物總量不斷加大,污物種類不斷增多,傳統的回轉式清污機和抓斗式清污機已經不能滿足實際清污要求[1]。在分析比較各種清污機性能優劣并適當吸收國外清污機優點的基礎上,設計一種新型抓臂式清污機。
抓臂式清污機是一個集機械、液壓于一體的復雜系統,多學科領域的相互作用導致很難在單一的軟件平臺仿真其工作過程[2-3]。本研究分別在 ADAMS軟件中建立清污機機械系統模型,在 AMESim中建立清污機工作裝置液壓系統模型,最終實現兩個系統的聯合仿真[4]。通過聯合仿真,分析了機械、液壓系統的動態特性,為抓臂式清污機研發提供了依據。
1 抓臂式清污機工作原理
抓臂式清污機主要由行走裝置、轉動平臺和工作裝置三大部分組成,其中工作裝置包括抓臂、斗桿、抓斗、抓臂油缸、斗桿油缸和抓斗油缸,如圖1所示。工作裝置采用液壓機械臂的結構形式,較長的抓臂和斗桿設計適合對泵站底部污物進行抓取,具有結構簡單、剛度好、操作方便等特點。

圖1 抓臂式清污機結構簡圖
抓臂式清污機進行工作時,行走裝置在預置導軌上移動到清污地點,轉動平臺將工作裝置旋轉至污物上空,在液壓油缸的驅動作用下,抓斗下降到合適的清污位置,驅動抓斗閉合,隨后移動抓斗到卸污位置,抓斗打開污物拋下,完成一個清污過程。
抓臂式清污機工作裝置主要部件之間彼此鉸接,在液壓缸的作用下各部件繞鉸點轉動。整個工作裝置以抓臂鉸接處作為轉動點,通過油缸的伸出與收回操作抓臂的提升與下降。抓臂式清污機采用雙抓臂油缸可以有效防止工作裝置的左右擺動。斗桿裝置通過與抓臂上部的鉸接布置在抓臂的前端,斗桿油缸伸出時斗桿裝置做內收動作,斗桿油缸收縮時做外翻動作。抓臂式清污機采用對稱布置的兩瓣嚙合式抓斗,抓斗與斗桿的兩側進行鉸接。清污機作業時,抓斗油缸伸出則抓斗合并,完成污物的抓取,抓斗油缸收縮則抓斗分離做卸料動作。
2 動力學模型建立
運用ADAMS軟件對抓臂式清污機進行動力學仿真,需要建立仿真模型,但直接在ADAMS中建模比較困難。本研究首先在SolidWorks軟件建立抓臂式清污機的三維模型,然后通過parasolid格式進行過渡,將其傳遞到ADAMS中,最后添加約束和力,完成模型建立。
2.1 三維模型建立
在SolidWorks軟件中建立抓臂式清污機各個部件的三維模型,并將所有部件按實際裝配關系組裝成裝配體,最后得到抓臂式清污機的整機模型,如圖2所示。

圖2 抓臂式清污機三維模型
2.2 ADAMS模型建立
將三維模型導入ADAMS的方法很多,本研究采用將SolidWorks模型轉化為 parasolid(.x-t)格式,再從ADAMS中讀取該格式文件的方法,該方法優點是操作便捷,并且模型失真情況較小。導入后的模型如圖3所示。

圖3 抓臂式清污機ADAMS模型
3 工作裝置液壓系統設計
清污機工作裝置主要由抓臂油缸、斗桿油缸和抓斗油缸驅動,合理的液壓系統設計對整機性能起到至關重要的影響。本研究采用基于負載敏感閥前補償系統的液壓回路設計,工作裝置液壓原理如圖4所示。
負載敏感系統在工程機械領域應用十分廣泛,其顯著特點是可以滿足多個執行機構的同時動作和實現與負載無關的無級控制。并且負載敏感系統可以按照負載壓力的變化自動調節泵的出口壓力和流量,確保泵的輸出壓力和流量根據實際需要進行變化,減少系統能量的溢出,節能效果良好[5]。

1.電機 2.變量泵 3、8.單向閥 4、6.過濾器 5.溢流閥 7.壓力補償閥 9.比例換向閥 10.梭閥 11.雙向平衡閥 12.油缸 圖4 工作裝置液壓原理圖
工作裝置液壓動力元件采用電機搭配變量泵的組合,實際工況多為單泵多負載復合動作,為使泵的供油壓力足以驅動負載中壓力最大者,液壓系統通過反饋油路將回路中最高的負載壓力傳遞給變量泵。此時變量泵輸出壓力大于低負載壓力回路的壓力需求,導致系統不能保證執行元件均具有流量匹配特性。為避免這種不利的影響,可在各回路比例換向閥之前設置壓力補償閥,工作時,壓力補償閥通過其內部節流口開度的變化來調整換向閥前的壓力,使比例換向閥前后的壓差為定值,這樣通過改變換向閥閥芯節流面積來控制并分配流量,流量大小就只與換向閥的開度有關,而不受負載壓力的影響,為系統控制提供了方便[6-7]。
此外,選用雙向平衡閥以及雙向液控單向閥作為液壓系統的閉鎖元件,均為了保證工作裝置不會因為自重等外部原因出現下滑、超重或振動,保障了系統的安全[8]。
4 聯合仿真模型建立和分析
ADAMS 和 AMESim 的聯合仿真采用以AMESim軟件為主控軟件,ADAMS為輔助軟件的共同聯合仿真模式。通過接口文件將機械動力學模型和液壓系統模型聯合起來,以實現工作裝置的機械與液壓系統的數據交換,這種交互式的仿真方式,不僅能夠較準確模擬清污機工作裝置的真實工作環境,而且有效提高仿真精度和效率[9]。
4.1 聯合仿真模型建立
首先定義ADAMS的輸入、輸出狀態變量,其中輸入狀態變量為液壓缸的速度,輸出狀態變量為液壓油缸的負載壓力。調用ADAMS/control模塊建立接口文件,然后在AMESim軟件中通過Modeling-Import Adams model加載接口模塊,最后將接口模塊與液壓系統AMESim模型結合構成聯合仿真模型[10-11],如圖5所示。
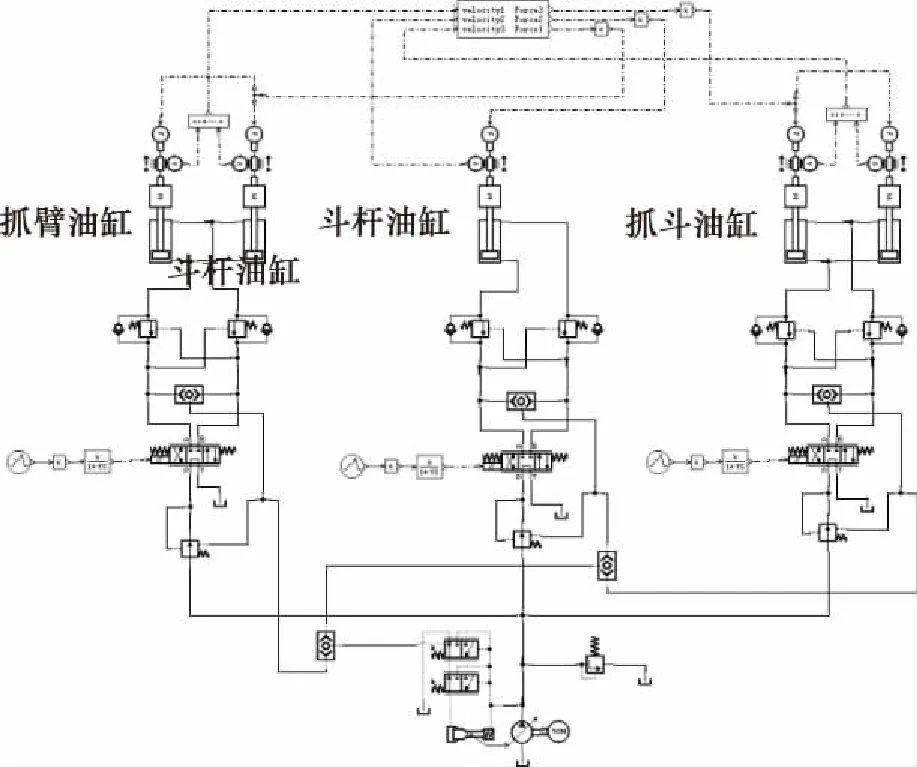
圖5 工作裝置聯合仿真模型
聯合仿真過程中,機械與液壓系統之間的數據實時傳遞,不同軟件中相同物理量的單位必須相同。ADAMS 模型提供液壓缸的負載壓力給AMESim 模型,作為液壓缸的負載;AMESim 模型輸入液壓缸的運動速度給ADAMS模型,作為工作裝置的驅動[12]。
4.2 清污機工作過程
為了解工作裝置機械-液壓系統運行情況,對抓臂式清污機一個完整的清污循環過程進行聯合仿真分析,時間分配和液壓缸狀態見表1,運動位置關系如圖6所示。

表1 清污循環過程中各液壓缸狀態

圖6 清污循環過程位置關系示意圖
4.3 聯合仿真主要參數設置
變量泵采用力士樂A10VSO系列DFR軸向柱塞泵,排量最大為71 mL·r-1,電機轉速為1500 r·min-1,即泵的最大輸出流量為106.5 L·min-1;壓力補償閥的彈簧調定壓力為0.5 MPa,即工作時比例換向閥前后壓力差恒為0.5 MPa,液壓油缸主要參數如表2所示。
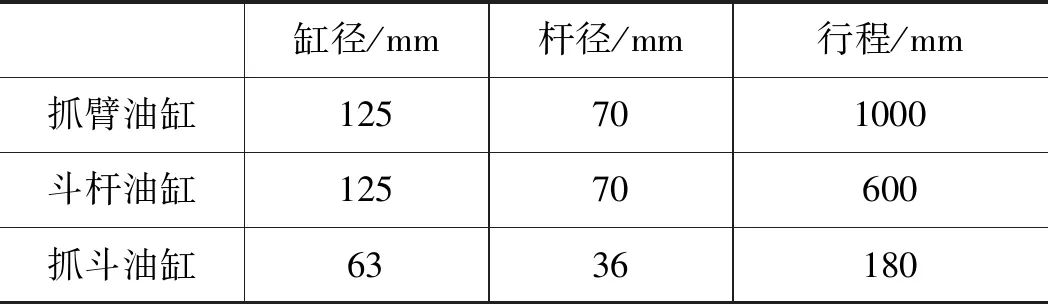
表2 液壓油缸主要參數
4.4 聯合仿真結果分析
圖7所示是各液壓支路流量變化情況。圖8所示是比例換向閥的控制信號輸入,縱坐標數值表示當前流通面積與最大流通面積的比值,數值為正時液壓油缸活塞桿伸出,數值為負時液壓油缸活塞桿收縮。

圖7 液壓支路流量-時間圖
對圖中數據進行提取分析,將各液壓支路流量與對應比例換向閥控制信號進行比較,得出其比值關系如表3所示。
在同一液壓支路中,流量與比例換向閥控制信號比值幾乎相等,可得出支路流量與比例換向閥控制信號大小成正比,并且運動時油缸承受負載壓力一直變化,以抓臂液壓支路為例,在0~20 s和25~45 s這段時間,抓臂液壓油缸工作,承受負載不斷變化,如圖9所示。以上兩點說明液壓回路可實現與負載無關的無級控制。
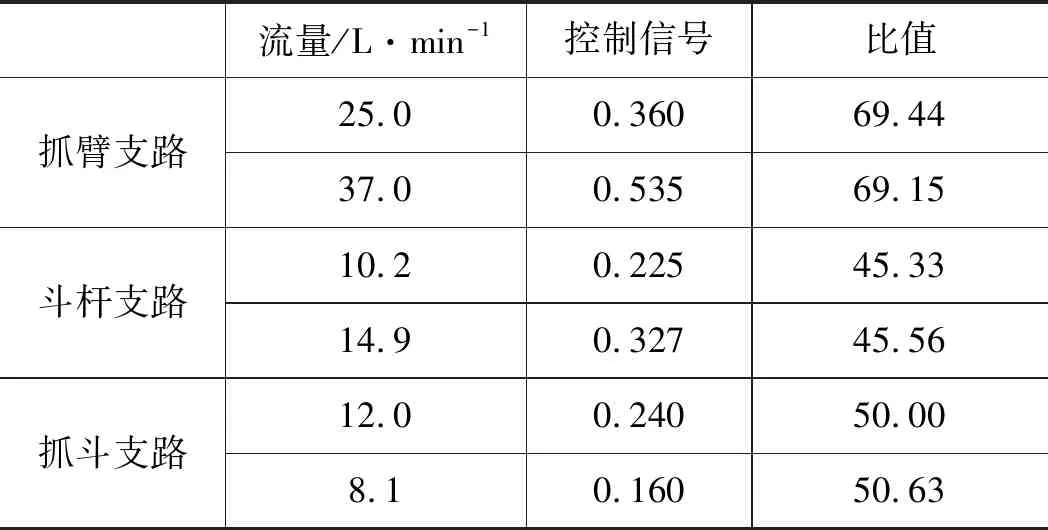
表3 液壓支路流量與換向閥控制信號關系

圖8 比例換向閥控制信號-時間圖

圖9 抓臂液壓油缸承受負載-時間圖
5 結論
本研究提出一種新型抓臂式清污機的設計,根據其系統結構特點,充分發揮不同軟件平臺的優勢,運用 AMESim 和 ADAMS 聯合仿真技術,在典型清污工況下對該系統進行了仿真分析,仿真和分析結果表明:
(1) 抓臂式清污機可實現多個液壓油缸的同時動作,且液壓油缸流量大小與負載無關,只與比例方向閥流通面積成正比。因此對系統的控制只需要改變比例方向閥的信號,方便了控制系統的設計;
(2) 聯合仿真技術可以更加精確的對抓臂式清污機機械-液壓系統進行仿真分析,與實際工況基本相符。通過聯合仿真分析可以為抓臂式清污機的研發設計和改進提供依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19