基于RBF終端滑模觀測器的電機轉子位置估計
2020-01-14 06:03:30劉慧博江帥璐
計算機應用與軟件 2020年1期
關鍵詞:設計
劉慧博 江帥璐
(內蒙古科技大學 內蒙古 包頭 014010)
0 引 言
無刷直流電機因其體積小、重量輕、效率高、運行可靠等優點在各個領域都被普遍采用。尤其是在一些特殊的工作環境下,位置傳感器的安裝會帶來諸多問題,因此無位置傳感器控制技術被越來越多地應用于實際生產工作中。
傳統無位置傳感器估計方法有反電動勢法、電感法、續流二極管法、觀測器等,其中滑模觀測器因對系統數學模型的精確度要求低且具有良好魯棒性,已成為目前研究的熱點。但是在實際系統中,滑模觀測器會由于其控制作用的不連續性而產生抖振現象,不能消除,只能削弱。
文獻[4]采用sigmoid連續函數來代替切換函數,有效抑制了抖振,但同時也降低了系統的魯棒性和反應速度。文獻[5]利用趨近律的概念,提出一種變結構控制系統的抖振消除方法,通過調整趨近律參數保證滑動模態的動態品質,減弱高頻抖動,但參數的值需要精準控制,否則也會導致抖振。采用濾波器對控制信號進行平滑濾波,也是抑制抖振的有效方法,文獻[8-9]采用低通濾波器,獲得了平滑的控制信號,有效抑制了抖振,但是這種方法的難度在于加入濾波器之后的穩定性分析。文獻[10-11]設計了滑模觀測器來估計反電勢,省去了低通濾波器和相位補償環節,但估算的反電勢因為抖振和噪聲的影響仍然是不準確的。
本文采用無位置傳感器控制方法,在傳統滑模觀測器的基礎上,為抑制抖振現象,引入了終端滑模面,提出了基于自適應RBF神經網絡終端滑模觀測器的轉子位置估計方法,結合RBF神經網絡控制與終端滑模控制的優點,不僅優化了控制信號,還削弱了一般滑模控制的抖振現象,提高了轉子位置與速度的估算精度,滿足無刷直流電機的工作要求。
1 無刷直流電機數學模型
三相無刷直流電動機相電壓的平衡方程為:
(1)
式中:Ua、Ub、Uc為定子各相的端電壓(V);Ra、Rb、Rc為定子各相繞組電阻(Ω);L=Ls-M,L為定子電感,Ls為每相繞組自感,M為相間繞組互感;ia、ib、ic為定子各相電流(A);ea、eb、ec為定子各相反電動勢(V)。
基于電機線反電勢的電壓方程為:
(2)
式中:iab、ibc為兩相定子電流之差;eab、ebc為電機的線反電勢;uab、ubc為電機的線電壓。電機的線電壓狀態方程為:
(3)
利用線反電勢過零點獲取電機轉子位置時,由于電流微分項的存在,會導致線反電勢的計算誤差,所以本文設計了滑模觀測器對線反電勢進行估計,提高估計精度。
2 觀測器設計
2.1 終端滑模觀測器
采用滑模觀測器進行轉子位置估計的控制框圖如圖1所示,通過定子電流和線電壓來估計電機的轉子位置和速度。

圖1 采用滑模觀測器電機控制系統框圖
構建終端滑模觀測器為:
(4)
與式(3)相減得誤差方程:
(5)


圖2 終端滑模觀測器結構圖

選取終端滑模函數z來實現s的二階滑模控制:
(6)


2.2 RBF神經網絡設計
本文主要的創新點為等效控制νeq是通過RBF神經網絡得到,并且將滑模變量作為神經網絡的輸入,其輸出即為觀測器的控制策略,將控制目標從跟蹤誤差轉為滑模函數。整體結構如圖3所示。

圖3 RBF終端滑模觀測器結構框圖
(7)




(8)

選取RBF網絡的學習指標:
(9)

則自適應率為:
(10)
式中:η>0為學習速率;ρ=-ηγ(q/p)sq/p-1。

3 仿真分析
在MATLAB/Siulink中建立仿真模型并進行仿真對比,電機參數和觀測器參數如表1所示。
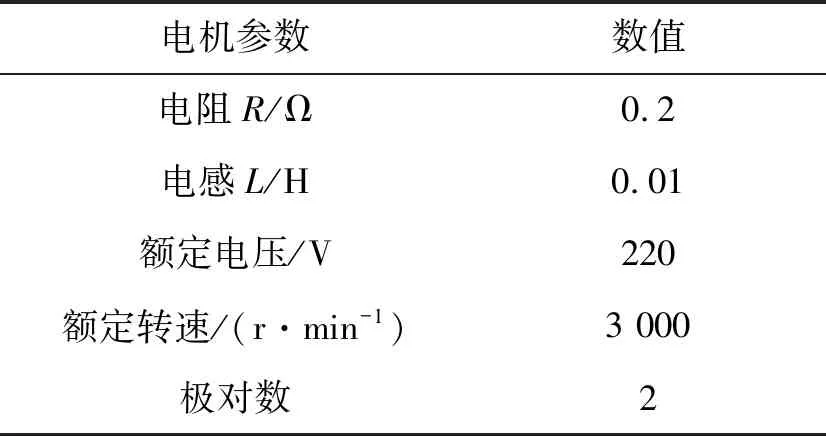
表1 電機參數
觀測器設計參數:
γ=diag(0.001,0.001),q=7,p=9,Rs=2.875,神經網絡初始權值為隨機值,網絡結構2-5-2。高斯函數參數取j=5,aj=[-3,-1.5,0,1.5,3;-1.5,0,1.5,3]T,bj=[1,1,1,1,1]T,η=1.5。
仿真結果如圖4-圖8所示。

(a) 轉速為600 r/min
(b) 轉速為800 r/min
(c) 轉速為1 000 r/min
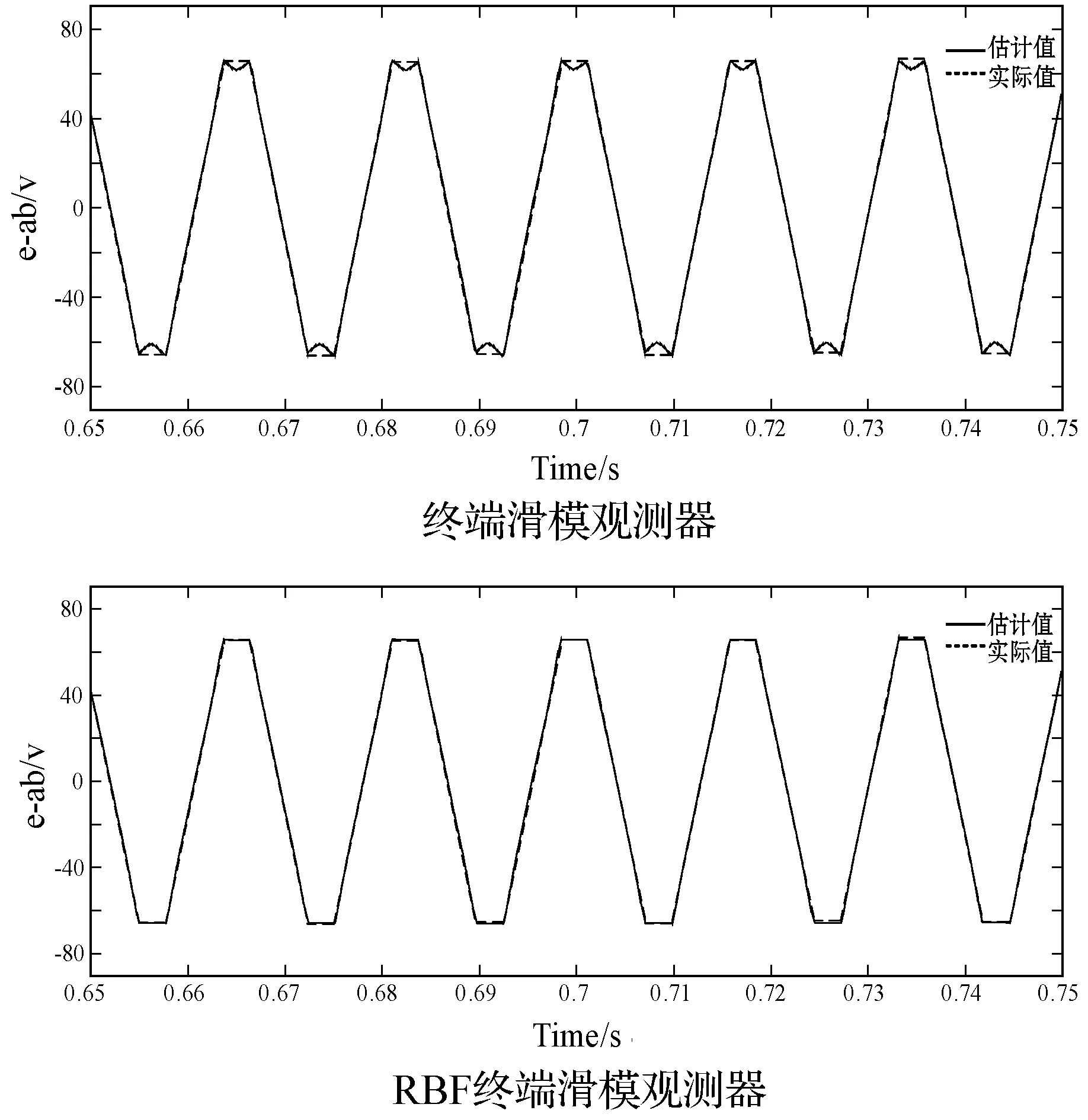
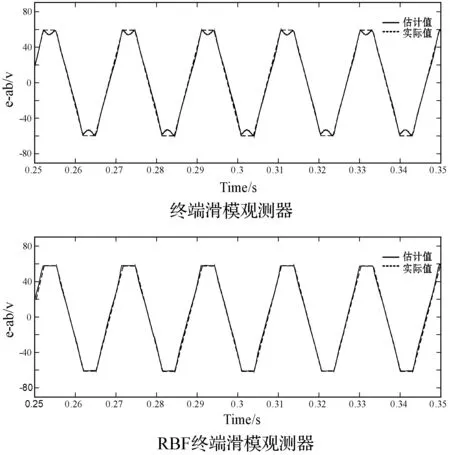
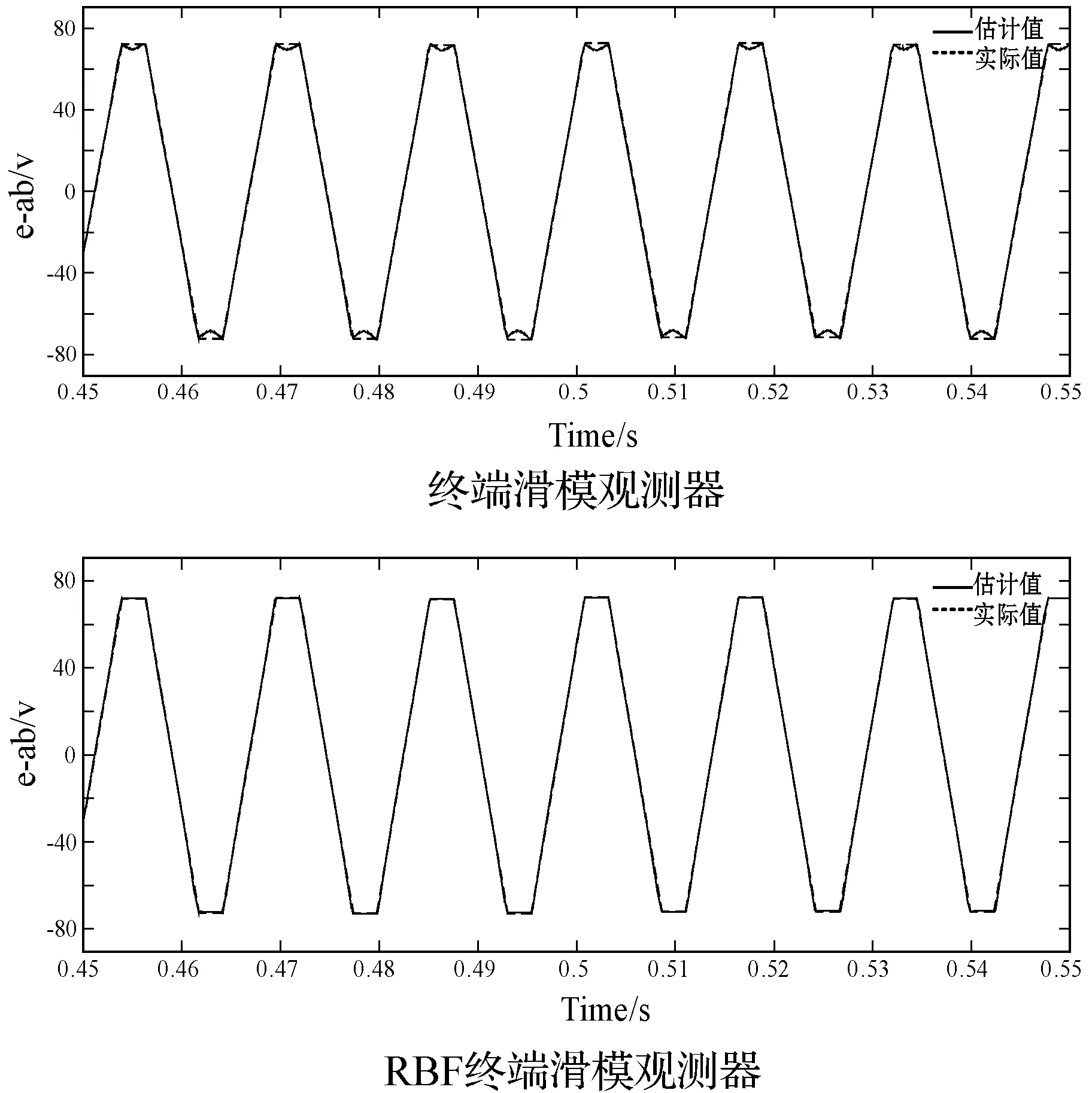
(d) 轉速為900r/min圖4 不同轉速下反電勢eab的估計值
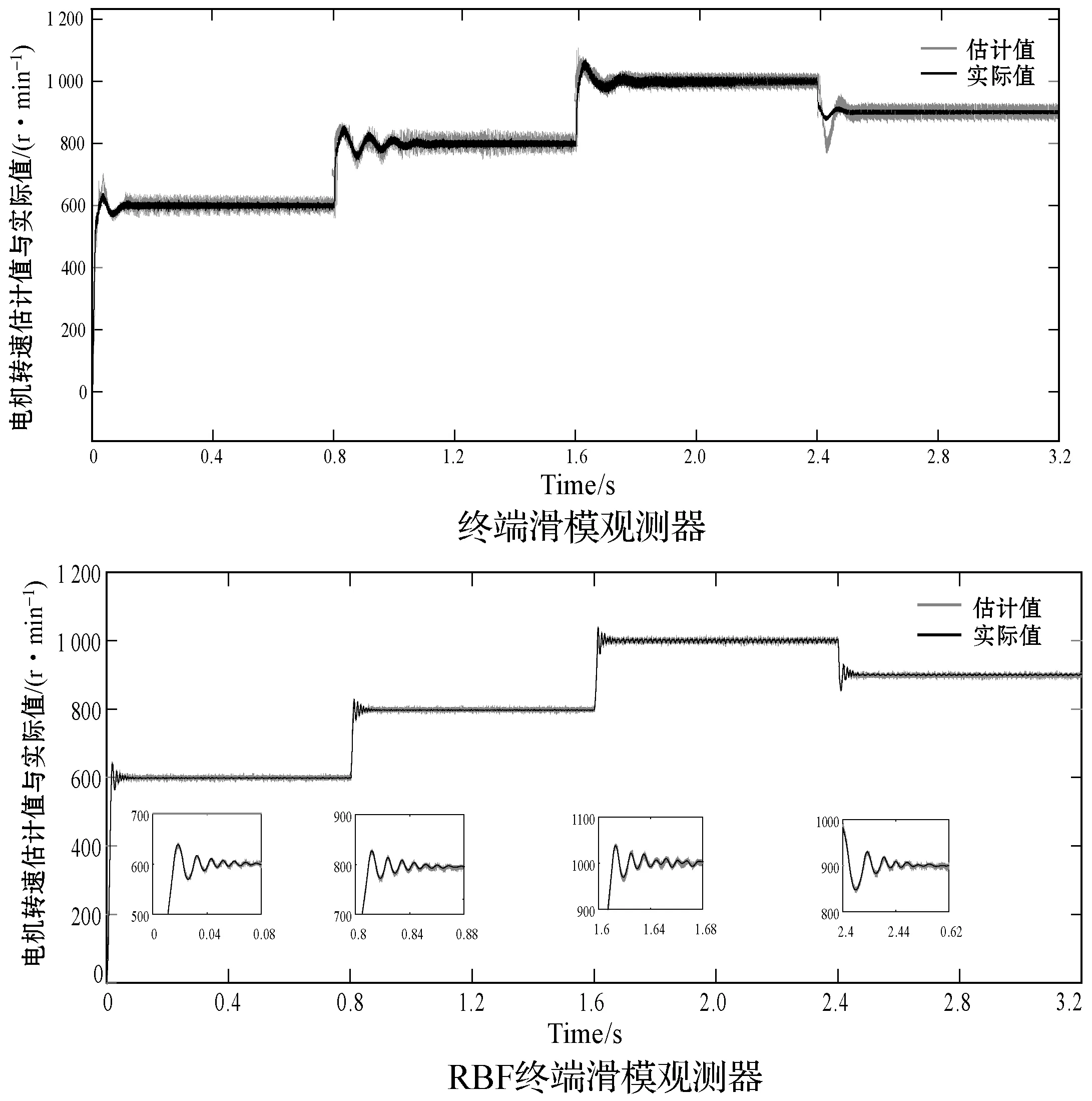
圖5 轉速估計值與實際值

圖6 轉速估計誤差

圖7 RBF終端滑模觀測器轉子位置估計值與實際值
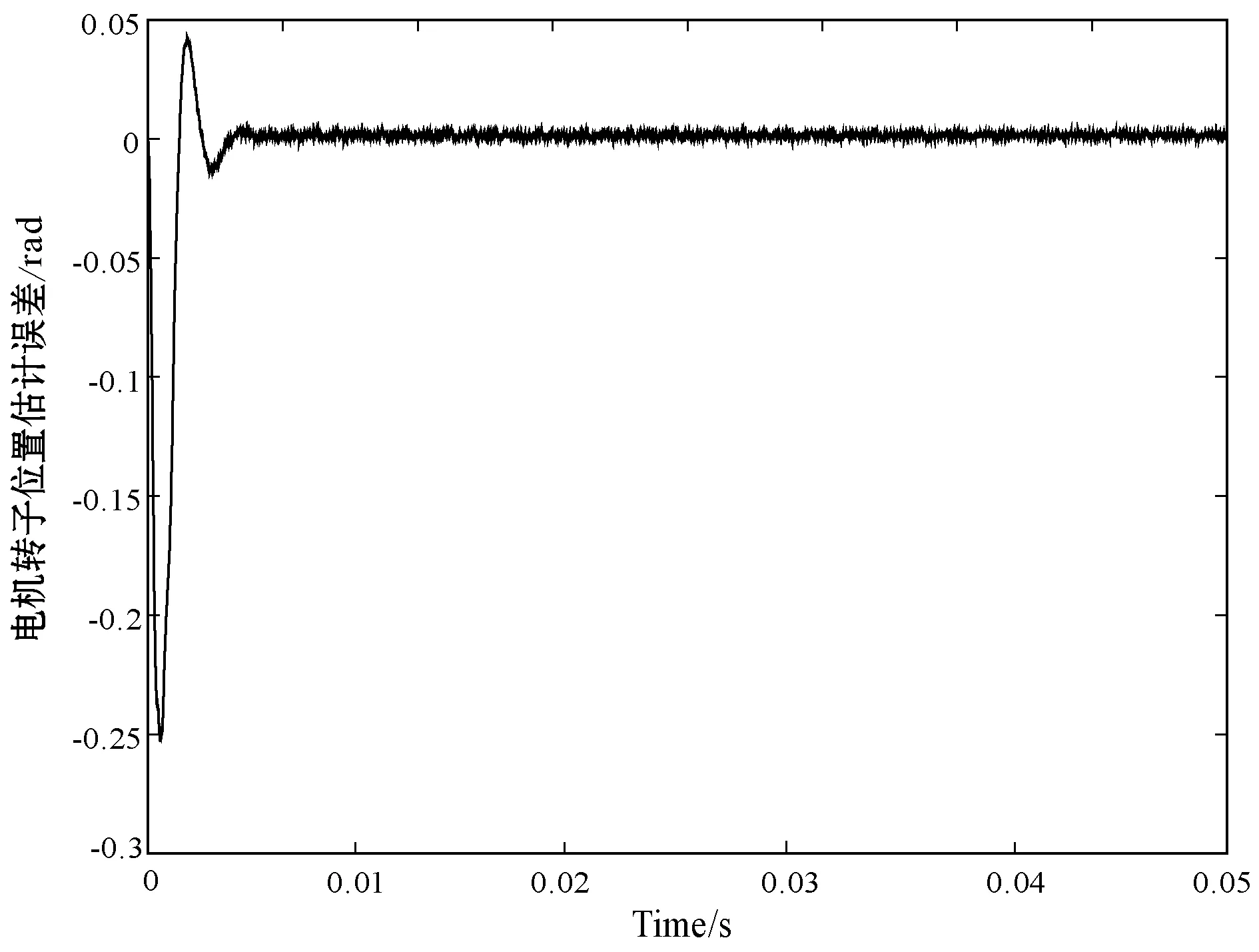
圖8 RBF終端滑模觀測器轉子位置估計誤差
圖4表示電機在不同轉速下的反電勢估計值,可以看出RBF終端滑模觀測器曲線相比終端滑模觀測器曲線更加連續光滑,估計準確。
由圖5和圖6可看出,RBF終端滑模觀測器比終端滑模觀測器電機轉速實現了更快速準確的調整,轉速估計誤差也相對較小。在0~2.4 s,電機轉速逐漸增加,觀測器能較好地觀測速度,具備很好的動態性能;2.4~3.2 s轉速下降,電機也能快速調整,觀測誤差較小,抖振較小,說明所設計的RBF終端滑模觀測器性能較好。
由圖7和圖8可知,所設計的RBF神經網絡終端滑模觀測器可以準確檢測轉子位置,誤差在允許范圍之內。
4 結 語
本文設計了RBF神經網絡終端滑模觀測器,將RBF神經網絡控制與終端滑模控制的優點結合起來,優化了控制信號。仿真結果表明,所設計的RBF終端滑模觀測器削弱了終端滑模觀測器的抖振現象,準確估計了線反電勢、轉速以及轉子位置,滿足無刷直流電機的工作要求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04