基于模式判別的運(yùn)動(dòng)學(xué)約束輔助空中動(dòng)基座對(duì)準(zhǔn)方法
2020-01-07 08:17:40曾慶化劉建業(yè)高春雷
中國(guó)慣性技術(shù)學(xué)報(bào) 2019年5期
趙 賓,曾慶化,劉建業(yè),高春雷
(1.南京航空航天大學(xué) 自動(dòng)化學(xué)院 導(dǎo)航研究中心,南京 210016;2.南京航空航天大學(xué)金城學(xué)院,南京 211156)
對(duì)于采用北斗/SINS組合導(dǎo)航的運(yùn)載體,如果能充分利用組合導(dǎo)航系統(tǒng)中北斗衛(wèi)星導(dǎo)航系統(tǒng)的信息對(duì)捷聯(lián)慣導(dǎo)系統(tǒng)(Strapdown Inertial Navigation System,SINS)進(jìn)行初始化,則可以減小系統(tǒng)對(duì)載體的依賴,實(shí)現(xiàn)自主對(duì)準(zhǔn)。由于載體任務(wù)、環(huán)境的不同,往往需要在不同的機(jī)動(dòng)下完成初始對(duì)準(zhǔn):在低機(jī)動(dòng)情況下,收斂速度較快,但是方位失準(zhǔn)角可觀測(cè)度較低[1],導(dǎo)致方位失準(zhǔn)角的對(duì)準(zhǔn)精度較低;在高機(jī)動(dòng)情況下,方位失準(zhǔn)角可觀測(cè)性得到提高,但機(jī)動(dòng)運(yùn)動(dòng)同時(shí)也會(huì)增強(qiáng)系統(tǒng)的非線性,對(duì)卡爾曼濾波器的估計(jì)效果產(chǎn)生一定的負(fù)面影響,對(duì)準(zhǔn)的快速性和精度受到影響[2]。且在實(shí)際戰(zhàn)場(chǎng)中,北斗信號(hào)很容易受到干擾,無(wú)法保證其信息的有效性。如何綜合提高載機(jī)各種機(jī)動(dòng)情況下的對(duì)準(zhǔn)性能,是亟需解決的問(wèn)題。
模型輔助導(dǎo)航是一種低成本的 SINS誤差修正方法[3],主要有動(dòng)力學(xué)輔助和運(yùn)動(dòng)學(xué)約束兩種模式。由于飛機(jī)等空中運(yùn)載體具有大量子系統(tǒng)和強(qiáng)非線性特性,所以建立簡(jiǎn)潔實(shí)用的動(dòng)力學(xué)模型比較困難。相對(duì)來(lái)講,運(yùn)動(dòng)學(xué)約束是SINS誤差控制的常用手段,它通過(guò)將飛行器的運(yùn)動(dòng)信息與現(xiàn)有的導(dǎo)航系統(tǒng)信息相融合,有效提高導(dǎo)航系統(tǒng)的導(dǎo)航精度與可靠性,無(wú)需增加額外的傳感器,具有自主性強(qiáng)、成本低和零載重等優(yōu)點(diǎn)。
當(dāng)載體在地面上運(yùn)動(dòng)且沒(méi)有側(cè)滑時(shí),載體側(cè)向和垂向速度為 0,稱之為速度約束。國(guó)內(nèi)外學(xué)者對(duì)速度約束在地面各類載體中的應(yīng)用進(jìn)行了大量的研究[4-6]。此外,車載導(dǎo)航的其他運(yùn)動(dòng)約束也得到充分研究:文獻(xiàn)[7]建立了適合于四輪車輛的轉(zhuǎn)彎半徑、前輪擺角、軸距的車輛運(yùn)動(dòng)學(xué)模型,來(lái)輔助車載導(dǎo)航。文獻(xiàn)[8]在常規(guī)速度約束的基礎(chǔ)上,建立了轉(zhuǎn)彎過(guò)程中的速度約束,實(shí)現(xiàn)了衛(wèi)星中斷情況下的車輛定位。文獻(xiàn)[9]論述了車輛速度約束以及加速度輸出計(jì)算的姿態(tài)角約束方法,增強(qiáng)慣性導(dǎo)航系統(tǒng)的性能。文獻(xiàn)[10]利用GPS輸出的水平速度獲得偽航向角作為約束信息,提高航向精度,但僅適用于無(wú)側(cè)滑角的情況。文獻(xiàn)[11]結(jié)合里程計(jì)測(cè)量信息構(gòu)建完整速度約束,并提出構(gòu)建虛擬位置觀測(cè)信息的方法,以提高衛(wèi)星中斷期間的導(dǎo)航精度。綜上可知:目前運(yùn)動(dòng)學(xué)約束輔助導(dǎo)航的研究多針對(duì)載體在地面運(yùn)動(dòng)的情況,空中載體的運(yùn)動(dòng)學(xué)約束尚未見(jiàn)到相關(guān)研究的報(bào)道。由于氣流角的存在以及空中運(yùn)動(dòng)的特點(diǎn),即使飛機(jī)穩(wěn)態(tài)飛行過(guò)程中,上述速度約束、轉(zhuǎn)彎約束、姿態(tài)角約束等條件也不再適用。
本文通過(guò)對(duì)飛機(jī)空中運(yùn)動(dòng)的狀態(tài)進(jìn)行分析,挖掘系統(tǒng)存在的合理約束,提出一種基于運(yùn)動(dòng)學(xué)約束輔助的捷聯(lián)慣導(dǎo)系統(tǒng)空中動(dòng)基座初始對(duì)準(zhǔn)方法。在不增加輔助傳感器的前提下,建立飛機(jī)角速度運(yùn)動(dòng)學(xué)模型,進(jìn)行運(yùn)動(dòng)模式判別,構(gòu)造虛擬量測(cè)方程輔助北斗衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行空中動(dòng)基座對(duì)準(zhǔn)。在載體低機(jī)動(dòng)情況下提高動(dòng)基座對(duì)準(zhǔn)的精度,在載體高機(jī)動(dòng)情況下提高動(dòng)基座對(duì)準(zhǔn)的快速性,滿足各種機(jī)動(dòng)情況下的機(jī)載捷聯(lián)慣導(dǎo)系統(tǒng)空中對(duì)準(zhǔn)精度、快速性等綜合需求。
1 基于運(yùn)動(dòng)學(xué)約束輔助的空中動(dòng)基座對(duì)準(zhǔn)方案設(shè)計(jì)
因此,在空中動(dòng)基座對(duì)準(zhǔn)過(guò)程中,選擇捷聯(lián)慣導(dǎo)系統(tǒng)導(dǎo)航解算得到的速度和北斗衛(wèi)星導(dǎo)航系統(tǒng)測(cè)量得到的速度的差值作為一組量測(cè)信息;再建立飛機(jī)角速度運(yùn)動(dòng)學(xué)模型,引入運(yùn)動(dòng)模式判別方案判斷運(yùn)動(dòng)約束的可用性。在運(yùn)動(dòng)約束可用時(shí),將捷聯(lián)慣導(dǎo)系統(tǒng)解算的角速度與理想的角速度(近似為 0)的差值作為另一組量測(cè)信息。采用兩者結(jié)合共同進(jìn)行量測(cè)更新,用卡爾曼濾波器對(duì)捷聯(lián)慣導(dǎo)系統(tǒng)的失準(zhǔn)角進(jìn)行估計(jì)和校準(zhǔn),完成飛機(jī)空中動(dòng)基座對(duì)準(zhǔn)。基于運(yùn)動(dòng)學(xué)約束輔助的機(jī)載捷聯(lián)慣導(dǎo)系統(tǒng)空中動(dòng)基座對(duì)準(zhǔn)方案如圖1所示。
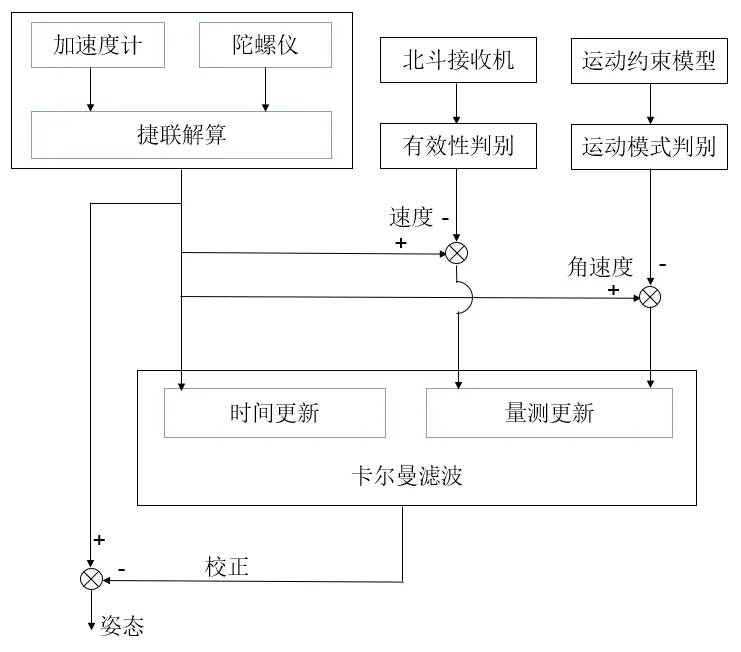
圖1 基于運(yùn)動(dòng)學(xué)約束模型輔助的捷聯(lián)慣導(dǎo)系統(tǒng)空中動(dòng)基座對(duì)準(zhǔn)方案框圖Fig.1 In-flight moving-base alignment scheme of SINS based on kinematic constraint model
采用運(yùn)動(dòng)模式判別方案檢測(cè)到飛機(jī)處于非角運(yùn)動(dòng)狀態(tài)時(shí),即引入角速度約束模型,聯(lián)合北斗衛(wèi)星導(dǎo)航系統(tǒng)信息進(jìn)行量測(cè)更新。當(dāng)檢測(cè)到飛機(jī)處于角運(yùn)動(dòng)狀態(tài)時(shí),即對(duì)角速度約束輔助進(jìn)行隔離,角速度虛擬量測(cè)信息不參與濾波器的量測(cè)更新,僅由北斗衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行量測(cè)更新。在應(yīng)用中,能夠比較方便地根據(jù)可用信息切換組合模式。該方案可以在不增加額外傳感器的前提下,綜合提高北斗衛(wèi)星導(dǎo)航系統(tǒng)輔助捷聯(lián)慣導(dǎo)系統(tǒng)動(dòng)基座對(duì)準(zhǔn)的精度和快速性。
由上述方案設(shè)計(jì)可知,角速度運(yùn)動(dòng)約束模型和角運(yùn)動(dòng)模式判別是實(shí)現(xiàn)本方案的關(guān)鍵環(huán)節(jié),因此首先對(duì)角速度運(yùn)動(dòng)學(xué)約束模型構(gòu)建和角運(yùn)動(dòng)模式判別方案進(jìn)行研究。
2 飛機(jī)角速度運(yùn)動(dòng)學(xué)約束模型構(gòu)建
導(dǎo)航坐標(biāo)系選取東北天地理坐標(biāo)系,飛機(jī)機(jī)體坐標(biāo)系選取右前上坐標(biāo)系。在捷聯(lián)慣導(dǎo)系統(tǒng)中,角速度表達(dá)式如下:


c系和n系之間存在計(jì)算誤差,因此代入式(2):
式(3)可展開為:

忽略二階小量可得:


由第1節(jié)的分析可知:當(dāng)載體處于非角運(yùn)動(dòng)狀態(tài)時(shí),地球自轉(zhuǎn)和載體在地球表面運(yùn)動(dòng)所產(chǎn)生的角速度分量量級(jí)較小,可認(rèn)為機(jī)體坐標(biāo)系相對(duì)于導(dǎo)航坐標(biāo)系的角速度近似為零;而捷聯(lián)慣導(dǎo)系統(tǒng)導(dǎo)航解算得到的角速度實(shí)際值,由于誤差 的存在并不為零。因此,可將機(jī)載捷聯(lián)慣導(dǎo)系統(tǒng)解算得到的角速度實(shí)際值在機(jī)體坐標(biāo)系、、軸上投影作為動(dòng)基座對(duì)準(zhǔn)的虛擬量測(cè)信息,并將地球自轉(zhuǎn)和載體在地球表面運(yùn)動(dòng)所產(chǎn)生的角速度分量視為量測(cè)信息的噪聲信息進(jìn)行處理。
則可通過(guò)式(8)構(gòu)建運(yùn)動(dòng)約束虛擬量測(cè)方程,如式(9)所示。
3 基于殘差的角運(yùn)動(dòng)模式判別方案
在飛機(jī)空中運(yùn)動(dòng)過(guò)程中,對(duì)其角運(yùn)動(dòng)模式進(jìn)行實(shí)時(shí)的判別,正確控制角速度約束的使用,是本算法應(yīng)用的關(guān)鍵。對(duì)運(yùn)動(dòng)學(xué)約束輔助的空中動(dòng)基座對(duì)準(zhǔn)算法進(jìn)一步分析可知,式(9)中虛擬量測(cè)信息是由捷聯(lián)慣導(dǎo)系統(tǒng)解算的角速度構(gòu)成,即角速度值將通過(guò)量測(cè)信息對(duì)濾波器產(chǎn)生影響。從這個(gè)角度出發(fā),考慮將系統(tǒng)級(jí)故障檢測(cè)的思路用于運(yùn)動(dòng)約束輔助對(duì)準(zhǔn)濾波器中,實(shí)時(shí)檢測(cè)虛擬量測(cè)信息的有效性。
該設(shè)計(jì)思想如下:將系統(tǒng)處于角運(yùn)動(dòng)的狀態(tài)視為非穩(wěn)態(tài)(類比于故障檢測(cè)中的故障狀態(tài)),將系統(tǒng)處于非角運(yùn)動(dòng)的狀態(tài)視為穩(wěn)態(tài)(類比于故障檢測(cè)中的非故障狀態(tài)),通過(guò)殘差檢驗(yàn)法實(shí)時(shí)判斷系統(tǒng)是否存在穩(wěn)態(tài)。若檢測(cè)到有“故障”,則表明系統(tǒng)處于角運(yùn)動(dòng)狀態(tài)(非穩(wěn)態(tài)),機(jī)體坐標(biāo)系相對(duì)于導(dǎo)航坐標(biāo)系的角速度理想值不再為0。顯然,由載體角運(yùn)動(dòng)引起的“故障”將直接造成虛擬量測(cè)信息無(wú)法表征實(shí)際的運(yùn)動(dòng)角速度信息,則角速度虛擬量測(cè)信息不參與濾波器的量測(cè)更新,僅由北斗衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行量測(cè)更新。反之,若檢測(cè)到“無(wú)故障”,則表明系統(tǒng)處于非角運(yùn)動(dòng)狀態(tài)(穩(wěn)態(tài)),引入角速度約束模型,聯(lián)合北斗衛(wèi)星導(dǎo)航系統(tǒng)信息進(jìn)行量測(cè)更新。

飛機(jī)角運(yùn)動(dòng)帶來(lái)的實(shí)際角速度將通過(guò)量測(cè)殘差向量對(duì)濾波器產(chǎn)生很大影響,甚至導(dǎo)致濾波發(fā)散。
其方差為:
當(dāng)飛機(jī)處于非角運(yùn)動(dòng)狀態(tài)時(shí),殘差rω,k較小;當(dāng)飛機(jī)處于角運(yùn)動(dòng)狀態(tài)時(shí),殘差rω,k急劇增大。因此,通過(guò)對(duì)殘差rω,k進(jìn)行檢驗(yàn)即可判別飛機(jī)的角運(yùn)動(dòng)狀態(tài),從而確定運(yùn)動(dòng)約束是否可用。構(gòu)建角運(yùn)動(dòng)模式檢測(cè)函數(shù):

選擇適當(dāng)?shù)拈撝礣D,當(dāng)λω,k<TD時(shí),則判定飛機(jī)處于非角運(yùn)動(dòng)狀態(tài),運(yùn)動(dòng)約束有效。
需要特別指出的是:由于本方法中將地球自轉(zhuǎn)和載體在地球表面運(yùn)動(dòng)所產(chǎn)生的角速度分量視為量測(cè)信息的噪聲信息進(jìn)行處理,所以非角運(yùn)動(dòng)狀態(tài)時(shí)量測(cè)向量的殘差均值并不為0,λω,k也不服從χ2分布,TD無(wú)法按照誤警率計(jì)算得到。在實(shí)際應(yīng)用中,需對(duì)飛機(jī)的角速度數(shù)據(jù)進(jìn)行預(yù)分析,綜合考慮所選用慣性器件精度、振動(dòng)環(huán)境等多種因素影響,確定TD取值。
4 基于運(yùn)動(dòng)學(xué)約束模型輔助的空中動(dòng)基座對(duì)準(zhǔn)誤差模型
4.1 對(duì)準(zhǔn)系統(tǒng)狀態(tài)方程
選取捷聯(lián)慣導(dǎo)系統(tǒng)的數(shù)學(xué)平臺(tái)誤差角φE、φN、φU,速度誤差δvE、 δvN、 δvU,陀螺隨機(jī)常值漂移εbx、εby、εbz,陀螺一階馬爾可夫過(guò)程εrx、εry、εrz,加速度計(jì)一階馬爾可夫過(guò)程 ?x、 ?y、 ?z為對(duì)準(zhǔn)濾波的狀態(tài)量:
則狀態(tài)方程為:

式中,X(t)為狀態(tài)向量,A(t)為狀態(tài)轉(zhuǎn)移矩陣,G(t)為系統(tǒng)噪聲系數(shù)矩陣,W(t)為系統(tǒng)噪聲向量。
4.2 對(duì)準(zhǔn)系統(tǒng)量測(cè)方程
1)慣性/北斗組合量測(cè)信息:選擇捷聯(lián)慣導(dǎo)系統(tǒng)導(dǎo)航解算得到速度和北斗衛(wèi)星導(dǎo)航系統(tǒng)測(cè)量得到速度的差值作為一組量測(cè)信息。誤差均考慮為白噪聲。捷聯(lián)慣導(dǎo)系統(tǒng)和北斗衛(wèi)星導(dǎo)航系統(tǒng)的速度信息可分別表示為vI、vG,則速度量測(cè)方程為:

2)運(yùn)動(dòng)約束虛擬量測(cè)信息:基于運(yùn)動(dòng)學(xué)約束模型,根據(jù)飛機(jī)運(yùn)動(dòng)的特點(diǎn),構(gòu)建虛擬量測(cè)信息作為另一組量測(cè)信息。第2節(jié)中進(jìn)行了詳細(xì)的推導(dǎo),得到式(9)所示的角速度虛擬量測(cè)方程。
采用運(yùn)動(dòng)模式判別方案檢測(cè)到飛機(jī)處于非角運(yùn)動(dòng)狀態(tài)時(shí),式(14)和式(9)共同構(gòu)成量測(cè)方程,利用Zv(t)和Zω(t)進(jìn)行量測(cè)更新。當(dāng)檢測(cè)到飛機(jī)發(fā)生了角運(yùn)動(dòng)時(shí),即對(duì)角速度約束輔助進(jìn)行隔離,僅利用Zv(t)量測(cè)更新。
5 基于運(yùn)動(dòng)學(xué)約束模型輔助的空中動(dòng)基座對(duì)準(zhǔn)算法仿真驗(yàn)證分析
為驗(yàn)證本文提出的基于模式判別的運(yùn)動(dòng)約束輔助空中動(dòng)基座對(duì)準(zhǔn)算法的有效性,對(duì)多種典型機(jī)動(dòng)方式進(jìn)行仿真分析。研究發(fā)現(xiàn),氣流場(chǎng)對(duì)不同類型飛機(jī)的角速度影響有較大差異,根據(jù)對(duì)某型飛機(jī)相關(guān)氣流場(chǎng)影響的分析,在仿真過(guò)程中采用10-3(°)/s數(shù)量級(jí)的白噪聲模擬氣流場(chǎng)對(duì)角速度的影響。
5.1 仿真條件及高機(jī)動(dòng)下對(duì)準(zhǔn)結(jié)果
捷聯(lián)慣導(dǎo)系統(tǒng)的陀螺儀直接固聯(lián)在載體上,其工作環(huán)境惡劣,因此陀螺儀和加速度計(jì)誤差應(yīng)考慮一階馬爾可夫過(guò)程。仿真參數(shù)設(shè)置見(jiàn)表1所示。
機(jī)動(dòng)軌跡:在0~20 s進(jìn)行加速,加速度為4 m/s2;在 20~24 s進(jìn)行加速拉起,加速度為 5 m/s2,俯仰角速度為 7.5 (°)/s;在 64~68 s改平,俯仰角速度為-7.5 (°)/s;在78~81 s傾斜預(yù)轉(zhuǎn)彎,橫滾角速度為10 (°)/s;在81~141 s轉(zhuǎn)彎,航向角速度為1.5 (°)/s;在141~143 s改平,橫滾角速度為-10 (°)/s。其三維軌跡圖見(jiàn)圖2,該軌跡中,載體姿態(tài)機(jī)動(dòng)較多,基本涵蓋飛機(jī)空中飛行的常規(guī)角運(yùn)動(dòng)模式。
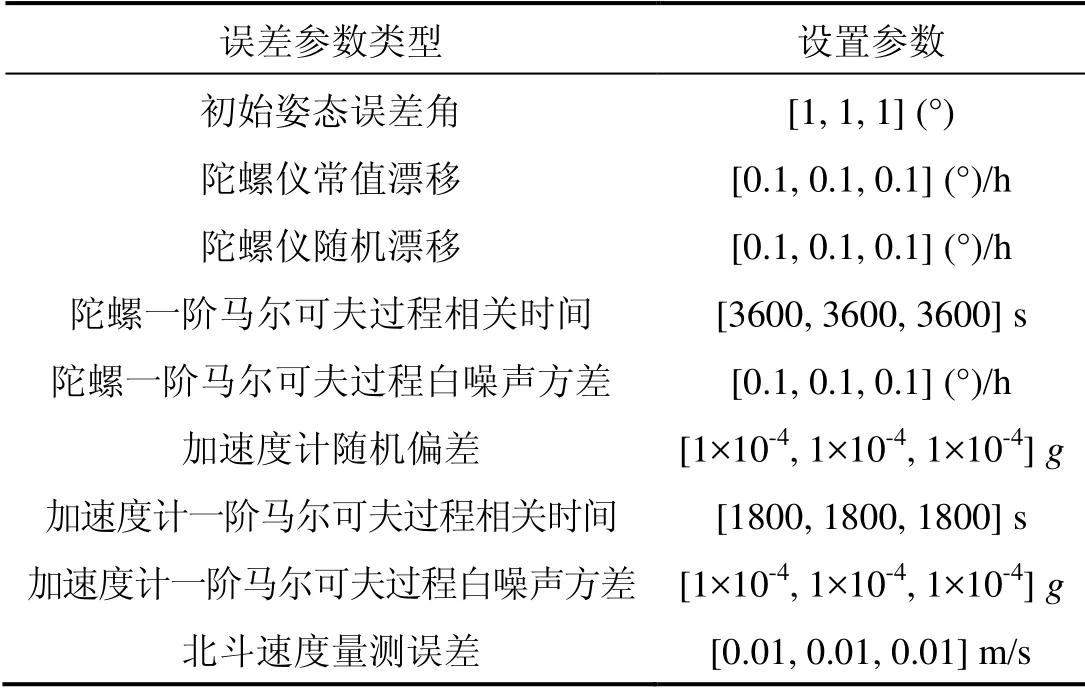
表1 仿真參數(shù)Tab.1 Simulation parameter
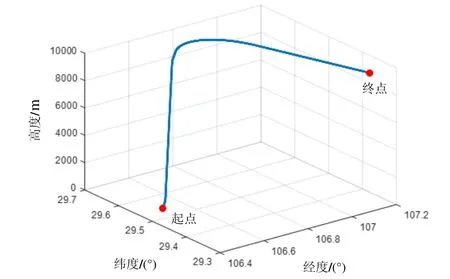
圖2 三維航跡圖Fig.2 Three-dimensional track
采用本文第3節(jié)的角運(yùn)動(dòng)判別方案對(duì)載體飛行模式進(jìn)行判別,在本文選用的慣性器件精度條件下,進(jìn)行大量的數(shù)據(jù)分析,選取較為合適的閾值為TD=15 000。由于角運(yùn)動(dòng)集中在前150 s內(nèi),因此給出前200 s的相關(guān)曲線。角運(yùn)動(dòng)模式檢測(cè)函數(shù)及放大圖見(jiàn)圖3(a)和圖3(b),判別結(jié)果見(jiàn)圖3(c)。
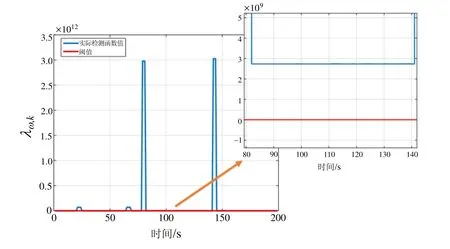
圖3 (a)角運(yùn)動(dòng)模式檢測(cè)函數(shù)Fig.3 (a) Angular motion mode detection function
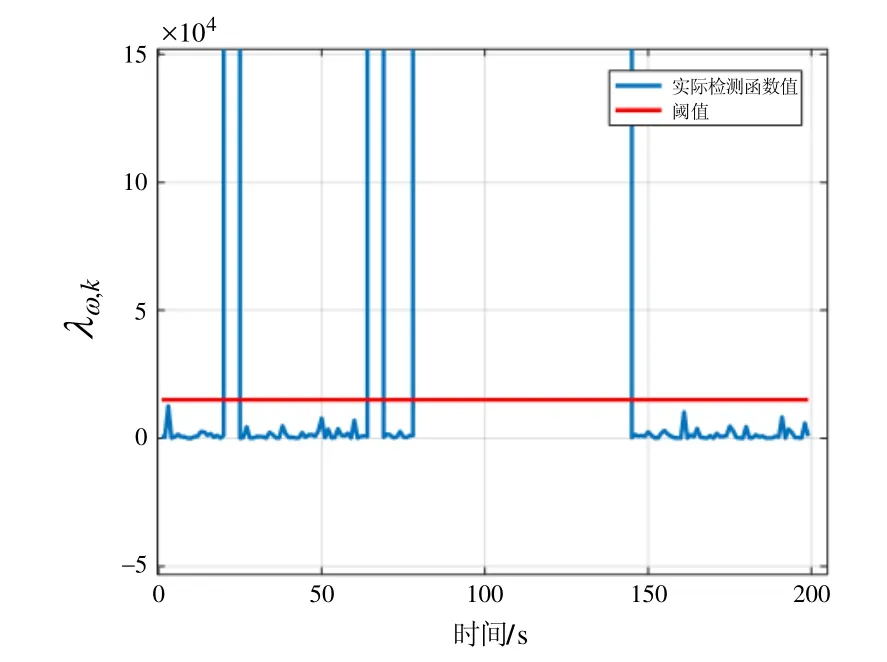
圖3 (b)角運(yùn)動(dòng)模式檢測(cè)函數(shù)放大圖Fig.3 (b) Magnified view of angular motion mode detection function
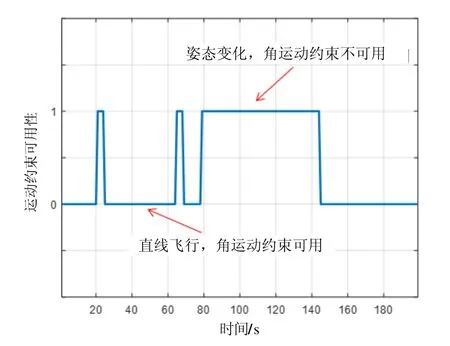
圖3 (c)角運(yùn)動(dòng)判別結(jié)果Fig.3 (c) Discriminant result of angular motion
由圖3(a)~(c)可以看出,本文提出的基于殘差的運(yùn)動(dòng)判別方案,可以有效判斷出飛機(jī)處于非角運(yùn)動(dòng)狀態(tài)的時(shí)間區(qū)間,從而在恰當(dāng)時(shí)刻引入角速度約束狀態(tài)時(shí)。考慮地球自轉(zhuǎn)、載體在地球表面運(yùn)動(dòng)以及氣流場(chǎng)所產(chǎn)生的角速度影響,檢測(cè)函數(shù)值在104量級(jí),而載體處于角運(yùn)動(dòng)狀態(tài)時(shí),檢測(cè)函數(shù)值急劇增大,瞬時(shí)達(dá)到109次方以上,說(shuō)明本方法可有效地將載體的角運(yùn)動(dòng)檢測(cè)出來(lái),將地球自轉(zhuǎn)和載體在地球表面運(yùn)動(dòng)所產(chǎn)生的角速度分量視為量測(cè)信息的噪聲信息進(jìn)行處理是可行的。
總的來(lái)看,銅仁市由于中低云量偏多,多陰天及陰雨天氣,日照時(shí)數(shù)大部分地區(qū)在1 100~1 300小時(shí)之間,日照較少,是全國(guó)日照低值區(qū)之一。但由于季節(jié)分布的不均勻性,秋收作物生育期光照條件比較好,光能的有效性高,能滿足花生生長(zhǎng)需要。
根據(jù)飛機(jī)角運(yùn)動(dòng)模式的判別結(jié)果,在非角運(yùn)動(dòng)狀態(tài)下,采用本文提出的基于運(yùn)動(dòng)學(xué)約束輔助的北斗衛(wèi)星導(dǎo)航系統(tǒng)空中動(dòng)基座對(duì)準(zhǔn)方法對(duì)捷聯(lián)慣導(dǎo)系統(tǒng)失準(zhǔn)角進(jìn)行估計(jì),選擇僅利用北斗衛(wèi)星導(dǎo)航系統(tǒng)信息的動(dòng)基座對(duì)準(zhǔn)算法作為對(duì)比進(jìn)行分析驗(yàn)證。濾波過(guò)程中對(duì)慣導(dǎo)系統(tǒng)進(jìn)行閉環(huán)校正,通過(guò)誤差校正后的姿態(tài)與真實(shí)姿態(tài)作差(即姿態(tài)角誤差)對(duì)比分析。姿態(tài)誤差曲線如圖4所示,其中“運(yùn)動(dòng)約束+北斗輔助對(duì)準(zhǔn)”是指采用本文所提出的基于模式判別的運(yùn)動(dòng)學(xué)約束輔助后的空中動(dòng)基座對(duì)準(zhǔn)方法,“北斗輔助對(duì)準(zhǔn)”是指僅用北斗衛(wèi)星導(dǎo)航系統(tǒng)輔助的空中動(dòng)基座對(duì)準(zhǔn)算法。
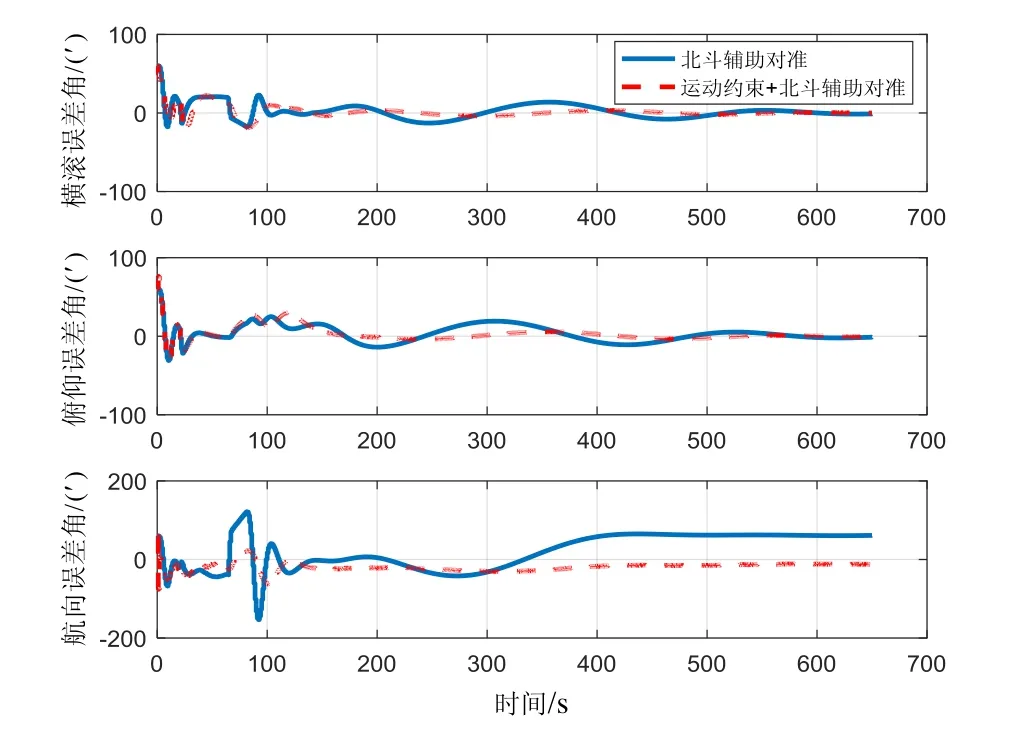
圖4 高機(jī)動(dòng)下兩種對(duì)準(zhǔn)方法姿態(tài)誤差曲線Fig.4 Attitude error curves of two alignment methods under high maneuvering
在對(duì)準(zhǔn)600 s至650 s的時(shí)間內(nèi),兩種對(duì)準(zhǔn)方法的均值和標(biāo)準(zhǔn)差雷達(dá)圖如圖5所示。
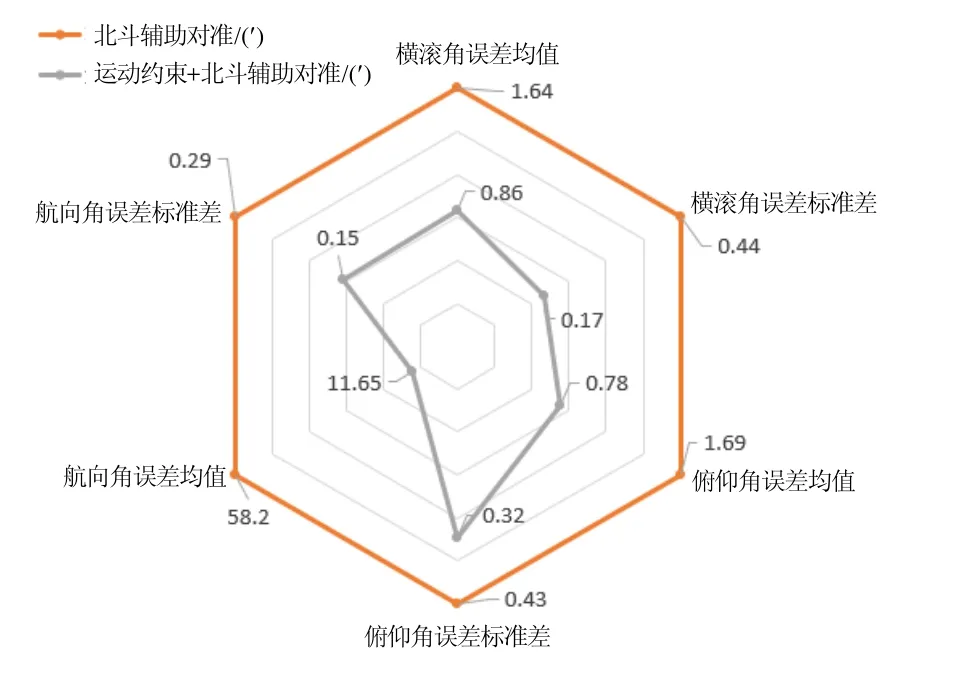
圖5 兩種對(duì)準(zhǔn)方法性能對(duì)比雷達(dá)圖Fig.5 Radar chart of performance comparison on two alignment methods
可以看出,載體在對(duì)準(zhǔn)期間多次進(jìn)行姿態(tài)機(jī)動(dòng),對(duì)于采用速度信息作為外觀測(cè)量進(jìn)行匹配的北斗輔助空中動(dòng)基座對(duì)準(zhǔn),一方面增強(qiáng)了航向角的可觀測(cè)性,機(jī)動(dòng)結(jié)束后航向角對(duì)準(zhǔn)精度得到提高,另一方面當(dāng)載體作機(jī)動(dòng)飛行時(shí),卡爾曼濾波會(huì)產(chǎn)生較大的濾波誤差,對(duì)準(zhǔn)的快速性受到影響,穩(wěn)定時(shí)間較長(zhǎng),在550 s左右橫滾角和俯仰角收斂到4′以內(nèi)。在較長(zhǎng)的穩(wěn)定時(shí)間內(nèi),航向角可觀測(cè)性較低導(dǎo)致其誤差再次增大,而卡爾曼濾波在濾波達(dá)到穩(wěn)態(tài)時(shí)會(huì)對(duì)誤差失去敏感性。
本文所提出的方法對(duì)準(zhǔn)精度和快速性均有了明顯提升,橫滾角和俯仰角在 400 s左右均可收斂到4′以內(nèi),航向角在450 s左右收斂并保持在15′以內(nèi)。且由圖5可知,在相同的對(duì)準(zhǔn)時(shí)間內(nèi),本文方法可以達(dá)到更高的對(duì)準(zhǔn)精度。
5.2 多種機(jī)動(dòng)條件下對(duì)準(zhǔn)結(jié)果
由于飛行軌跡對(duì)狀態(tài)變量的可觀性有直接的影響,載體機(jī)動(dòng)飛行的軌跡與對(duì)準(zhǔn)精度關(guān)系十分密切。因此在多種典型機(jī)動(dòng)方式下進(jìn)行對(duì)準(zhǔn)解算,以驗(yàn)證本文方法的適用性。受本文篇幅所限,僅給出對(duì)準(zhǔn)的姿態(tài)精度。
機(jī)動(dòng)1:加速機(jī)動(dòng),在10~50 s進(jìn)行加速,加速度為5m/s2。姿態(tài)誤差曲線如圖6(a)所示。
機(jī)動(dòng)2:勻速機(jī)動(dòng),載體勻速直線飛行。姿態(tài)誤差曲線如圖6(b)所示。
機(jī)動(dòng)3:蛇形機(jī)動(dòng),載體在10~20 s進(jìn)行一組蛇形機(jī)動(dòng),角速度為5 (°)/s。姿態(tài)誤差曲線如圖6(c)所示。
上述三種機(jī)動(dòng)條件下,兩種對(duì)準(zhǔn)方法的航向角對(duì)準(zhǔn)時(shí)間和對(duì)準(zhǔn)精度的雷達(dá)圖如圖7所示,其中勻速機(jī)動(dòng)條件下,僅采用北斗輔助的空中對(duì)準(zhǔn)方法航向角不收斂,此處采用初始航向誤差角(60′)作為其對(duì)準(zhǔn)精度,仿真時(shí)間(150 s)作為其對(duì)準(zhǔn)時(shí)間進(jìn)行繪圖。
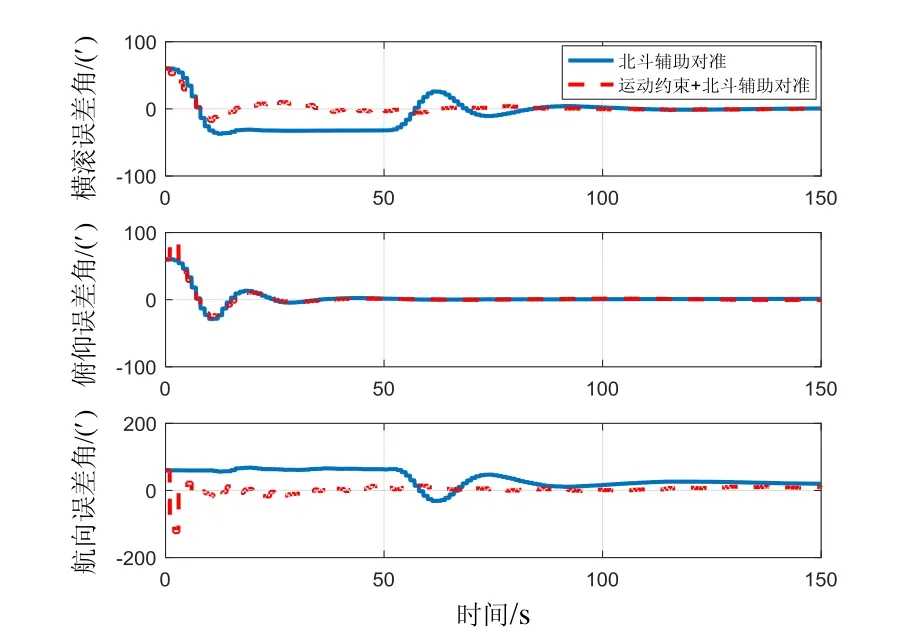
圖6 (a) 加速機(jī)動(dòng)下兩種對(duì)準(zhǔn)方法姿態(tài)誤差曲線Fig.6 (a) Attitude error curves of two alignment methods under acceleration maneuvering
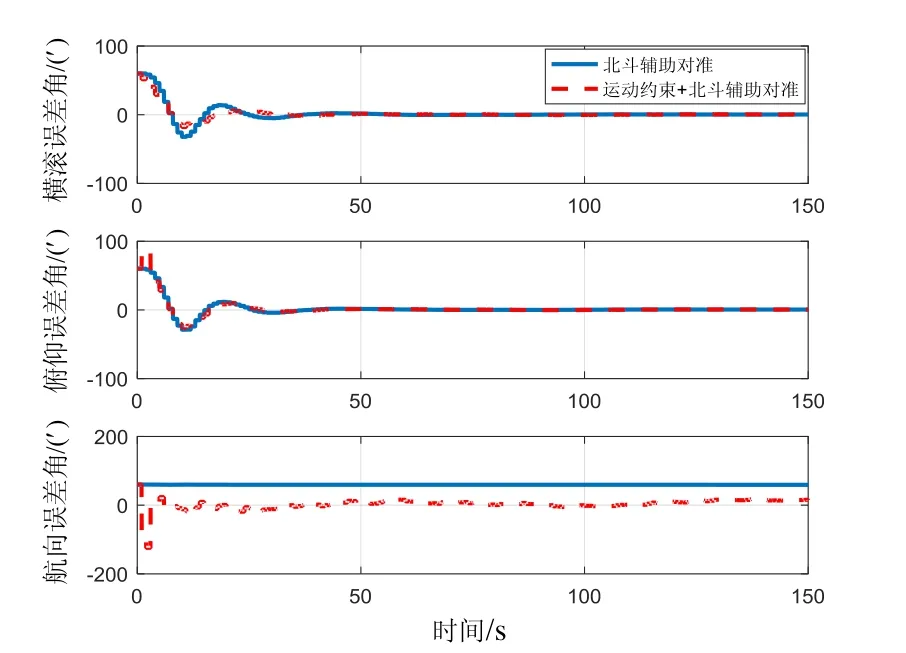
圖6 (b) 勻速飛行下兩種對(duì)準(zhǔn)方法姿態(tài)誤差曲線Fig.6 (b) Attitude error curves of two alignment methods under uniform-velocity flight
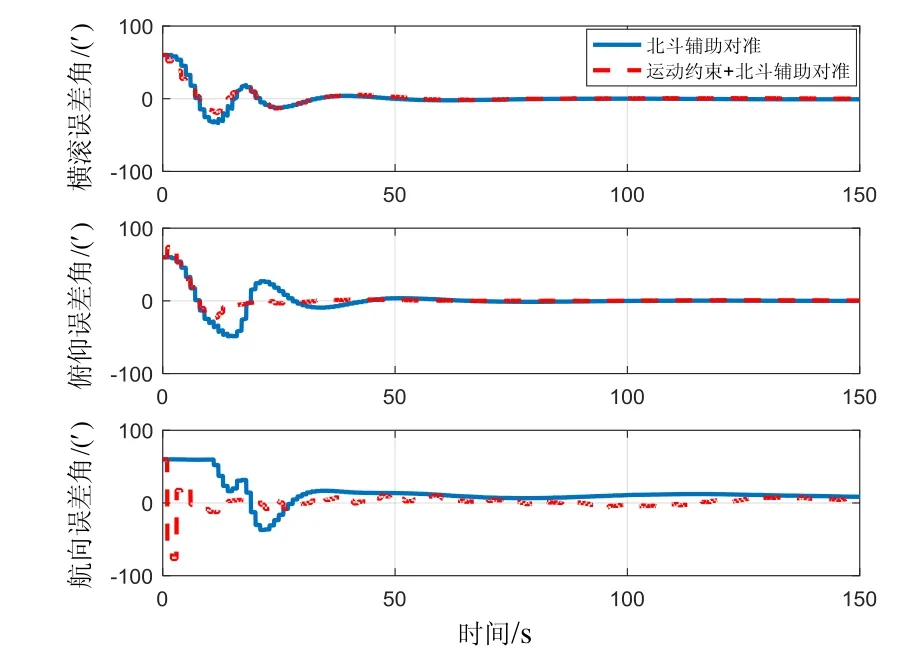
圖6 (c) 蛇形機(jī)動(dòng)下兩種對(duì)準(zhǔn)方法姿態(tài)誤差曲線Fig.6 (c) Attitude error curves of two alignment methods under snake maneuvering
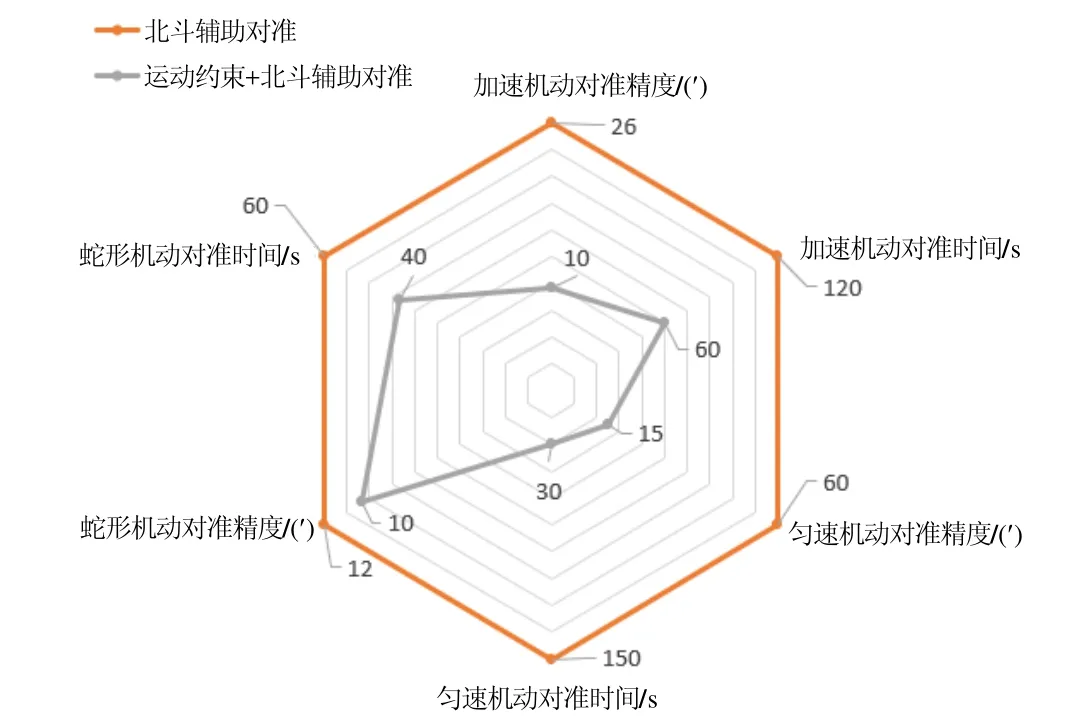
圖7 多種機(jī)動(dòng)方式下航向角對(duì)準(zhǔn)性能雷達(dá)圖Fig.7 Radar chart of heading angle alignment performance under multiple maneuver modes
可知:1)在多種機(jī)動(dòng)方式下,采用本文提出的基于運(yùn)動(dòng)學(xué)約束輔助的北斗空中動(dòng)基座對(duì)準(zhǔn)方法,均可以顯著提高對(duì)準(zhǔn)的快速性及對(duì)準(zhǔn)精度,尤其是航向角的對(duì)準(zhǔn)性能。這是因?yàn)楸疚姆椒ㄔ诒倍份o助的基礎(chǔ)上增加了角速度約束輔助量測(cè)信息,航向角的可觀測(cè)性提高,因此在穩(wěn)定性和精度方面都優(yōu)于僅采用北斗輔助的空中動(dòng)基座對(duì)準(zhǔn)。2)在勻速直飛時(shí)(加速機(jī)動(dòng)前20 s以及勻速機(jī)動(dòng)全程),采用速度信息作為外觀測(cè)量進(jìn)行匹配的北斗輔助空中動(dòng)基座對(duì)準(zhǔn),方位失準(zhǔn)角不可觀,因此航向角完全不收斂。而本文方法中角速度約束虛擬量測(cè)信息的引入,增加了方位失準(zhǔn)角的可觀測(cè)性,在勻速直飛運(yùn)動(dòng)下,航向角也迅速收斂,顯著改善了其對(duì)準(zhǔn)精度和快速性。
6 結(jié) 論
為了提高飛機(jī)快速反應(yīng)能力,優(yōu)化初始對(duì)準(zhǔn)性能,在傳統(tǒng)北斗輔助捷聯(lián)慣導(dǎo)系統(tǒng)進(jìn)行動(dòng)基座初始對(duì)準(zhǔn)架構(gòu)下,提出基于殘差的角運(yùn)動(dòng)模式判別方案,在此基礎(chǔ)上研究提出一種基于運(yùn)動(dòng)學(xué)約束模型輔助的空中動(dòng)基座對(duì)準(zhǔn)方法。在多種機(jī)動(dòng)方式下驗(yàn)證該方案的可行性及空中動(dòng)基座對(duì)準(zhǔn)性能。仿真驗(yàn)證結(jié)果表明:采用本文提出的基于運(yùn)動(dòng)學(xué)約束輔助的北斗空中動(dòng)基座對(duì)準(zhǔn)方法,各種機(jī)動(dòng)條件下均可顯著提高對(duì)準(zhǔn)的快速性及精度。在典型的加速機(jī)動(dòng)下,本文方法與僅采用北斗信息的空中動(dòng)基座對(duì)準(zhǔn)相比,航向角對(duì)準(zhǔn)時(shí)間由120 s縮減至60 s,對(duì)準(zhǔn)精度由26′提升至10′。本文提出的方法在不增加傳感器的前提下,優(yōu)化了空中動(dòng)基座初始對(duì)準(zhǔn)性能,對(duì)工程應(yīng)用具有重要的參考價(jià)值。
 中國(guó)慣性技術(shù)學(xué)報(bào)2019年5期
中國(guó)慣性技術(shù)學(xué)報(bào)2019年5期
- 中國(guó)慣性技術(shù)學(xué)報(bào)的其它文章
- Improving RGB-D SLAMthrough extracting static region using delaunay triangle mesh
- 基于橡膠等效動(dòng)態(tài)模量的慣導(dǎo)減振裝置設(shè)計(jì)方法
- 硅微諧振加速度計(jì)的模態(tài)分析與實(shí)驗(yàn)
- 基于微孔參數(shù)優(yōu)化的超流體陀螺噪聲抑制方法
- 一種基于Haar小波的光纖陀螺信號(hào)實(shí)時(shí)濾波方法
- 基于垂直約束的深海拖曳系統(tǒng)USBL/DVL組合導(dǎo)航算法