基于單片機(jī)的智能跟隨箱包設(shè)計(jì)
2020-01-03 10:09:02夏夢(mèng)琴陳煜周毛毛張紀(jì)趙玉榮
現(xiàn)代信息科技 2020年14期
夏夢(mèng)琴 陳煜 周毛毛 張紀(jì) 趙玉榮
摘? 要:行李箱是生活中被廣泛使用的日用品,文章針對(duì)普通行李箱耗費(fèi)體力的問題,對(duì)可跟隨智能箱包進(jìn)行研究,智能化普通的箱包,并對(duì)單片機(jī)在箱包中的應(yīng)用加以分析。可自動(dòng)跟隨智能箱包以單片機(jī)為控制中心,運(yùn)用GPS、藍(lán)牙、PID控制等技術(shù),能夠?qū)崟r(shí)檢測(cè)和追蹤運(yùn)動(dòng)中的目標(biāo),具有自動(dòng)跟隨、助力行走等功能,是一種新型智能箱包。其具有穩(wěn)定性高、成本低、方便省力、實(shí)時(shí)性好等特點(diǎn),具有一定的應(yīng)用價(jià)值和市場(chǎng)前景。
關(guān)鍵詞:自動(dòng)跟隨;GPS定位;藍(lán)牙;PID控制
Abstract:Luggage is widely used in daily life as daily necessities. Aiming at the problem of ordinary luggage consuming physical strength,the following smart luggage is researched to make ordinary luggage intelligent,and the application of single-chip microcomputer in luggage is analyzed. The smart luggage can automatically follow the single-chip microcomputer as the control center,using the GPS,Bluetooth,PID control technology,can detect and track the target in motion in real time,have the functions of automatic follow,assist walking,etc.,is a new type of smart luggage. The luggage has the characteristics of high stability,low cost,convenience and labor saving,and good real-time performance. It has certain application value and market prospects.
Keywords:automatic following;GPS positioning;Bluetooth;PID control
0? 引? 言
隨著通信技術(shù)的發(fā)展,自動(dòng)化、智能化已經(jīng)成為研究熱點(diǎn)。在日常生活中,長途旅行的人們通常需要攜帶大量行李,出行十分不便。傳統(tǒng)行李箱的前進(jìn)僅靠人為的推拉拖拽,易磨損,且容易丟失,通常會(huì)使人們感到十分疲勞。為了解決這個(gè)問題,本設(shè)計(jì)將單片機(jī)控制系統(tǒng)和GPS等技術(shù)相結(jié)合,能夠?qū)崟r(shí)檢測(cè)并追蹤移動(dòng)目標(biāo),實(shí)現(xiàn)自動(dòng)跟隨,此外該箱包可自動(dòng)提供動(dòng)力,使用者僅需通過拉桿控制箱包運(yùn)動(dòng),為使用者減輕大部分負(fù)擔(dān)、節(jié)省體力,在生產(chǎn)生活中具有一定的使用價(jià)值。
1? 智能行李箱的工作原理
智能箱包與普通箱包不同,研究難點(diǎn)在于如何準(zhǔn)確地定位目標(biāo)位置,在箱包與目標(biāo)之間建立實(shí)時(shí)穩(wěn)定的通信。關(guān)鍵問題在于箱包接收到目標(biāo)的位置坐標(biāo)后,如何根據(jù)自身的位置坐標(biāo)信息和目標(biāo)位置信息,設(shè)計(jì)出合理的最優(yōu)路徑,完成有效準(zhǔn)確的自動(dòng)跟隨。
本項(xiàng)目采用定位模塊、無線通信模塊實(shí)時(shí)接收和發(fā)送目標(biāo)位置,箱包可以得到目標(biāo)的實(shí)時(shí)位置,根據(jù)目標(biāo)坐標(biāo)位置與自身坐標(biāo)位置信息進(jìn)行科學(xué)的計(jì)算,判斷目標(biāo)的方向及目標(biāo)與箱包之間的距離,實(shí)現(xiàn)智能箱包對(duì)目標(biāo)的實(shí)時(shí)跟隨。同時(shí)在拉桿上設(shè)置速度檔位,實(shí)現(xiàn)對(duì)使用者的助力;此外還有避障模塊,箱包在自主跟隨過程中如若遇到障礙物,可自動(dòng)避開障礙物,避免智能箱包與障礙物之間發(fā)生碰撞,造成磨損,或發(fā)生一些不安全的事件。
2? 智能跟隨箱包的主要技術(shù)
智能跟隨箱包的研究主要包括四大技術(shù):GPS(Global Positioning System)定位技術(shù)、藍(lán)牙無線通信技術(shù)、PID控制技術(shù)和紅外避障技術(shù)。
2.1? GPS定位技術(shù)
定位的方式多種多樣,如采用SLAM與多傳感器相結(jié)合的方式精度較高,缺點(diǎn)是成本高、效率較低;或者采用圖像定位和需在地面貼上磁條的磁導(dǎo)航定位,但這兩種定位方式的精度不高。隨著GPS技術(shù)在各個(gè)領(lǐng)域的廣泛應(yīng)用,GPS系統(tǒng)起到了至關(guān)緊要的作用,為提高人類的生活質(zhì)量做出了重要的貢獻(xiàn)。GPS模塊的工作原理:首先由天線獲取衛(wèi)星信號(hào),之后對(duì)獲取的衛(wèi)星信號(hào)進(jìn)行各種變化和處理,從而實(shí)現(xiàn)對(duì)衛(wèi)星的跟蹤;再根據(jù)傳播的速度與時(shí)間,較為準(zhǔn)確地定位天線的位置。用戶可以通過輸入和輸出的接口,采取異步串行的通信方式與GPS接收模塊交換信息,獲得最優(yōu)的定位結(jié)果。GPS主要由衛(wèi)星模塊、監(jiān)控模塊、接收模塊三部分組成。衛(wèi)星模塊主要作用是定位信號(hào),監(jiān)控模塊主要用于檢測(cè)衛(wèi)星的運(yùn)行狀態(tài),接收模塊用來收集GPS的信號(hào)。GPS接收模塊結(jié)構(gòu)圖如圖1所示。
2.2? 藍(lán)牙無線通信技術(shù)
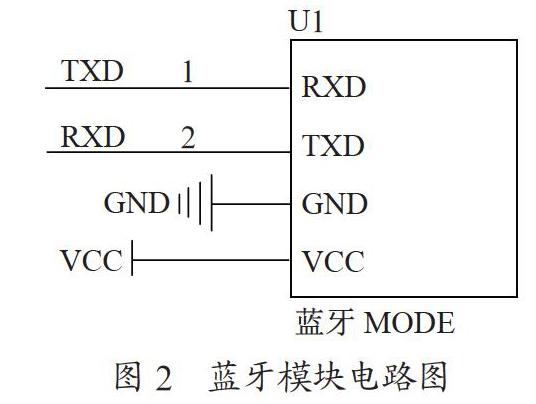
采用藍(lán)牙技術(shù)可以使箱包與手機(jī)通過藍(lán)牙進(jìn)行配對(duì),為每個(gè)箱包識(shí)別特定的1個(gè)主人或多個(gè)主人;其通過接收到的信號(hào)判斷箱包與主人之間的距離。藍(lán)牙連接的范圍在8米內(nèi)較為穩(wěn)定,藍(lán)牙技術(shù)是無線通信技術(shù)發(fā)展的重點(diǎn),本設(shè)計(jì)選用的藍(lán)牙模塊支持UART、USB、SPI等接口,此模塊具有成本低、體積小、功耗低、收發(fā)靈敏度高等優(yōu)點(diǎn),適合移動(dòng)設(shè)備和便攜設(shè)備,可以快速地完成短距離間數(shù)據(jù)+的無線傳輸。藍(lán)牙模塊電路圖如圖2所示。
2.3? PID控制技術(shù)
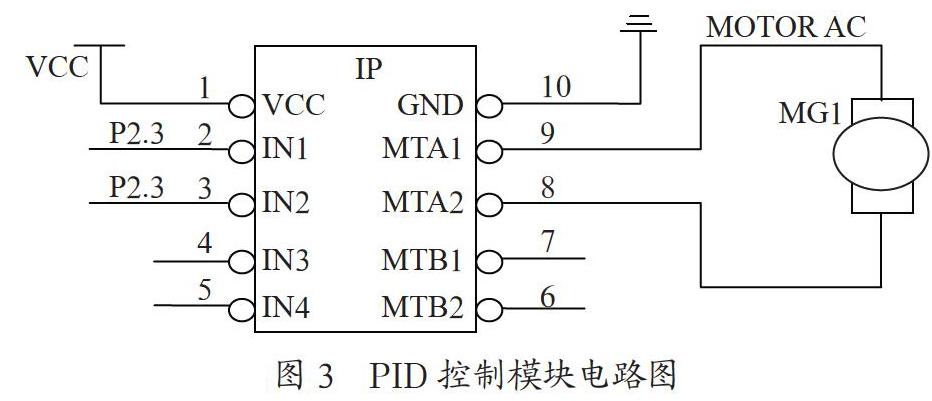
PID(Proportion Integral Differential)是工業(yè)中常用的控制器,PID調(diào)節(jié)中P表示比例、I表示積分、D表示微分,根據(jù)輸入的偏差值,計(jì)算比例、微積分一系列的數(shù)學(xué)函數(shù)變化,得到最終的輸出結(jié)果。通過PID調(diào)節(jié)電機(jī)轉(zhuǎn)速,可以控制箱包移動(dòng)的速度、轉(zhuǎn)向等。經(jīng)典的PID控制技術(shù)穩(wěn)定性較高,應(yīng)用廣泛。PID控制模塊電路圖如圖3所示。
2.4? 紅外避障技術(shù)
應(yīng)用紅外避障技術(shù)的行李箱自帶紅外探測(cè)器,可檢測(cè)前方障礙物,并快速處理紅外檢測(cè)裝置以及信號(hào)接收器的輸入結(jié)果,通過系統(tǒng)分析后,可實(shí)現(xiàn)對(duì)兩部電機(jī)的實(shí)時(shí)控制,如前進(jìn)、后退、停止等。
3? 系統(tǒng)硬件設(shè)計(jì)
單片機(jī)最小系統(tǒng)是控制整個(gè)電路的核心,是能使單片機(jī)工作的最小硬件單元。本設(shè)計(jì)的最小系統(tǒng)電路包含必備的內(nèi)部時(shí)鐘方式的時(shí)鐘電路、按鍵復(fù)位電路,另外還增加了液晶顯示接口等電路,支持功耗較低時(shí)的兩種節(jié)電工作模式,即空閑模式和掉電保持模式,同時(shí)還可實(shí)現(xiàn)掉電模式下的中斷恢復(fù)功能。
根據(jù)總體的設(shè)計(jì)方案,基于單片機(jī)的智能跟隨箱包,其硬件電路設(shè)計(jì)主要包括GPS模塊、藍(lán)牙模塊、PID控制模塊、紅外避障模塊、控制芯片STC89C52單片機(jī)、報(bào)警模塊和液晶顯示模塊、電源模塊、復(fù)位模塊組成。其硬件總體結(jié)構(gòu)框圖如圖4所示。
報(bào)警器模塊設(shè)計(jì)包括二氧化錫蜂鳴器、電阻、傳感器和PNP驅(qū)動(dòng)程序構(gòu)成,該電路蜂鳴器對(duì)低電平有效,通過電阻和PNP型三極管進(jìn)行驅(qū)動(dòng)。當(dāng)P1.0引腳為低電平時(shí),蜂鳴器就會(huì)報(bào)警。當(dāng)主人與智能箱包的距離超過設(shè)定的閾值時(shí),會(huì)收到一個(gè)低電平信號(hào),此時(shí)蜂鳴器發(fā)出報(bào)警聲,表示此時(shí)箱包與主人距離較遠(yuǎn),超出之前設(shè)定的安全距離。障礙物通常分為兩大類,一種是固定障礙物,如機(jī)場(chǎng)、汽車站、火車站內(nèi)的咨詢臺(tái)、椅子、柱子、商鋪等,其位置是不發(fā)生變化的,智能跟隨箱包能有效避開;另一種是移動(dòng)障礙物具有突發(fā)性和隨機(jī)性,例如突然闖入的行人,智能箱包對(duì)其無法做到100%避開。如果智能跟隨箱包與障礙物發(fā)生碰撞,此時(shí)蜂鳴器也會(huì)發(fā)出警報(bào),提醒主人注意安全。
液晶顯示模塊采用LCD1602,顯示屏內(nèi)部的字符發(fā)生存儲(chǔ)器(CGROM)集成了一百多個(gè)常見的字符,可根據(jù)的其位置進(jìn)行訪問調(diào)用,控制簡單。該智能箱包可選用2.8寸的TFT液晶屏,其帶有觸摸功能,分辨率320*240、16位色顯示支持,比較美觀、清晰度高,其工作電壓是3.3 V或者5 V。根據(jù)用戶的需求,液晶屏?xí)@示一些用戶所需的信息,如當(dāng)前的電量、智能跟隨箱包與目標(biāo)之間的實(shí)時(shí)距離,智能箱包當(dāng)前的運(yùn)動(dòng)速度等。此外LCD1602的功能齊全,可以提供各種控制命令。
復(fù)位模塊的基本作用是使智能箱包恢復(fù)到默認(rèn)的初始狀態(tài)。復(fù)位控制的方法多種多樣,如電容是一種記憶性的元件,采用換路定律,即利用電容上的電壓不能突變這一特性,可將電容與電阻串聯(lián)。在剛剛開始上電的時(shí)刻,假設(shè)上電前0-時(shí)刻電容上的電壓為0;在上電的一瞬間,即上電后0+時(shí)刻電容上的電壓仍為0,此時(shí)所有上電的電壓全部施加到電阻上,產(chǎn)生一個(gè)高電平復(fù)位信號(hào),使其恢復(fù)到初始狀態(tài)。
根據(jù)實(shí)際中所需的模塊考慮,本設(shè)計(jì)適宜采用直流電壓源直接供電,采用低壓供電的主要原因是能使智能箱包在整個(gè)使用過程中更加安全、可靠。
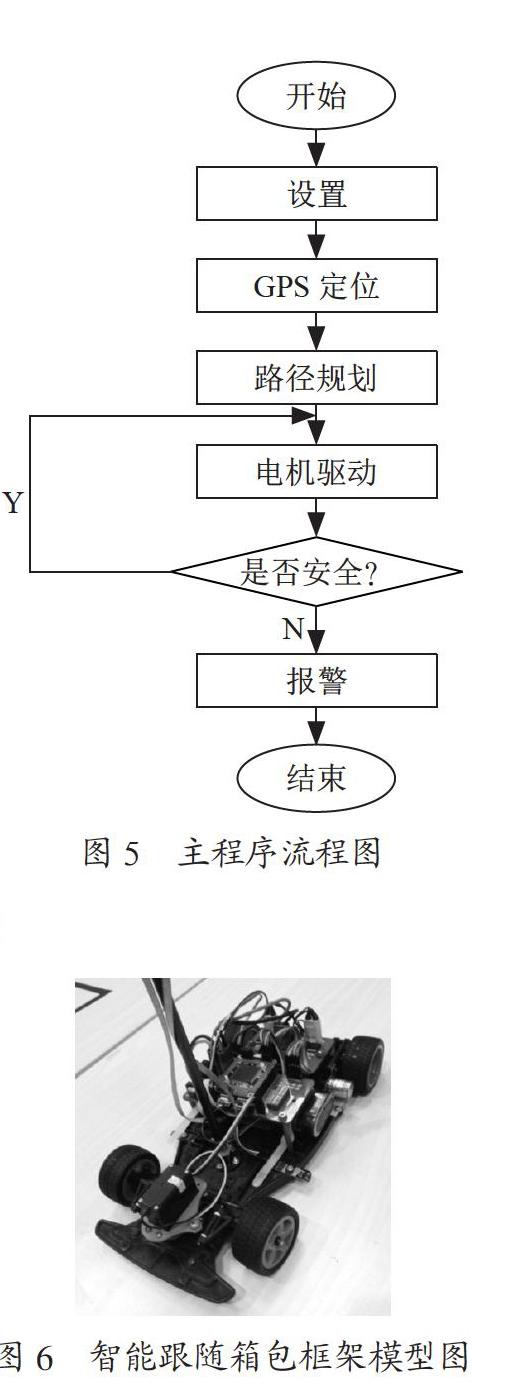
主程序的作用就是實(shí)現(xiàn)系統(tǒng)的基本功能,包括系統(tǒng)的復(fù)位模塊、定位模塊、藍(lán)牙模塊、電源模塊、液晶顯示模塊及報(bào)警模塊等。單片機(jī)的復(fù)位電路設(shè)計(jì)的科學(xué)性、合理性直接影響著整個(gè)箱包系統(tǒng)的有效性和可靠性。本設(shè)計(jì)的主程序流程圖如圖5所示。
4? 設(shè)計(jì)效果
筆者設(shè)計(jì)完成的智能跟隨箱包以單片機(jī)STC89C52為控制核心,具有藍(lán)牙模塊、GPS模塊、液晶顯示模塊等,智能跟隨箱包框架模型圖如圖6所示。
5? 結(jié)? 論
本設(shè)計(jì)是以智能跟隨為核心,通過GPS定位技術(shù)、PID控制等技術(shù)實(shí)現(xiàn)自動(dòng)跟隨、助力行走功能,通過過藍(lán)牙技術(shù)實(shí)現(xiàn)人與箱包之間短距離的通信,同時(shí)配有報(bào)警防丟失的功能,為人們的安全、輕便出行提供保障。該智能跟隨箱包的智能化及人性化設(shè)計(jì),具有非常廣闊的市場(chǎng)前景。
智能箱包為人們的出行提供了方便,但仍存在較大的改進(jìn)空間。
(1)智能箱包與目標(biāo)之間的通信,除了使用藍(lán)牙模塊,可考慮采用其他無線通信方式,如Wi-Fi模塊,增加傳輸?shù)挠行Ь嚯x,實(shí)現(xiàn)箱包與目標(biāo)之間較長距離的可靠通信。
(2)要使箱包更加準(zhǔn)確地跟隨目標(biāo),需優(yōu)化跟隨的算法,這將是智能跟隨箱包進(jìn)一步設(shè)計(jì)和研究的重點(diǎn)和難點(diǎn)。
參考文獻(xiàn):
[1] 焦蔚然.可自動(dòng)跟隨的智能箱包的概念與設(shè)計(jì) [J].電子技術(shù)與軟件工程,2018(4):248.
[2] 景建斌,張?jiān)讫?基于DW1000的自動(dòng)跟隨購物車系統(tǒng) [J].中國科技信息,2019(7):90-91+93.
[3] 王馨婧,高陽洋,焦悅.智能行李箱的研究 [J].科技風(fēng),2019(8):7.
作者簡介:夏夢(mèng)琴(1990.11—),女,漢族,安徽六安人,教師,助教,碩士研究生,研究方向:信號(hào)與信息處理。
