基于視頻識別技術的船舶視覺盲區增強方法研究
2020-01-03 10:07:30譚志榮陳維王輝李輝
中國水運 2020年12期
譚志榮 陳維 王輝 李輝


摘 要:船舶自身的裝卸設備會對駕駛臺的瞭望視野產生阻擋,從而引發了瞭望不全,導致駕引人員對周圍通航環境不能及時全面掌握常引起判斷錯誤和疏忽,進而引發事故。針對這一問題提出一種面向盲區的船舶視覺輔助瞭望方法,并設計了輔助駕駛信息可視化系統的總體框架。首先重復采集圖像信息,直到搜索到正焦狀態的位置,并利用視頻識別技術進行識別;最后通過單目測距算法,測量出與目標船舶的距離以把握周圍船舶動態。隨后通過實驗進行測試,結果驗證了本系統能有效消除視野盲區、具有較強的適用性。
關鍵詞:瞭望盲區;船舶碰撞;船距測量;視覺跟蹤
1引言
船舶自身的貨物及裝卸設備會對駕駛臺的瞭望視野產生阻擋,產生視覺盲區。2018年至2019年期間,長江江蘇段發生了多起因視野受限而發生的典型追尾事故。王世彤[1]通過5G將視頻信號傳遞到汽車駕駛室內來輔助駕駛員做出判斷;彭同興[2]設計了基于Arduino和GSM的彎道盲區可視化安全行車裝置;劉武藝[3]建立增強現實輔助瞭望模型,并借助AR智能眼鏡進行驗證;潘亞彬[4]通過三角原理計算出船舶航行時的視野盲區。
2基于視頻識別技術的輔助瞭望系統設計及分析
基于視頻識別技術輔助瞭望系統設計流程圖如圖1所示。
船舶輔助瞭望的實現步驟為圖像信息的采集、數據傳輸、圖像數據提取和反饋。
3基于視頻識別技術的單目測距
3.1單目原理
測距系統是根據光學成像系統在清晰成像時由高斯公式得到物體的距離,以點目標成像為例,基本的成像原理,如圖2所示。
3.2基于圖像處理的自動調焦過程
3.2.1測距系統基本原理
調焦系統的基本原理,如圖3所示。
整個調焦過程僅有一種輸入量:目標圖像序列,圖像處理單元擔負核心功能。
3.2.2 聚焦深度法
聚焦深度法主要由圖像預處理、構建調焦窗口、圖像質量評價和搜索策略制定構成。工作流程是首先采集一幀圖像,同時記錄圖像的位置信息和評價結果;然后改變鏡頭的位置,再次采集圖像,進行圖片清晰度的比對,重復進行,直到正焦。
4船舶瞭望盲區分析
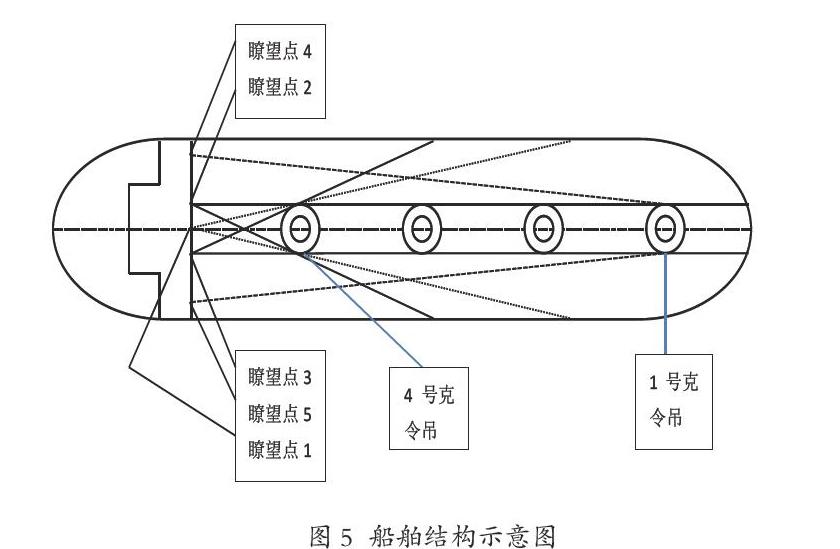
以一艘27000噸的靈便型海船為例,該輪全長157米,寬24米,駕駛臺尾布局,沿船中線布局克令吊4座,如圖5所示。
其中1號克令吊距離駕駛臺110米,4號克令吊距離駕駛臺25米,吊柱直徑4米,在駕駛臺布置5個瞭望點,瞭望點1居中,2、3號瞭望點取四座克令吊邊線延長線,4、5號瞭望點取駕駛室兩側距離中線6米處。假設吊臂及支座沿船中安置,只考慮吊柱體對瞭望的影響,則粗略計算出各瞭望點被擋視角:
不考慮船舶平視盲區,僅考慮克令吊對船舶盲區的影響,則自該船駕駛臺不同瞭望點的視野盲區如下圖6:
在不同距離內,距各瞭望點的被阻擋盲區寬度如下表1:
5仿真算例
5.1圖像測距
視頻攝像機通過捕捉船舶,并獲得相應的基礎信息,傳輸到計算機,隨后通過計算內置的測距,計算出目標船舶的距離。隨后通過船載雷達獲得船舶的實時方位,并結合船舶的方位,對所采集信息進行篩選,將篩選的信息通過計算機處理,生成虛擬信息。
5.2仿真結果分析
當檢測目標船存在時,該系統可以實現船舶識別。實驗中發現直接計算所得的位置顯示增強信息,會使增強信息遮擋目標船,為達到較好的目標船與增強信息融合效果,在不影響目標船與增強信息配準的條件下,增強信息顯示達到理想效果。
6結論
本文提出的一種面向盲區的船舶視覺輔助瞭望方法可以應用于船舶航行輔助瞭望。它通過實現虛擬圖像與目標船現實場景的融合,使駕駛員在平視狀態下獲取目標船信息,快速做出船舶避碰決策計劃,降低了船舶碰撞危險。
參考文獻:
[1]馬麗,苗露.無線傳感網絡覆蓋盲區檢測方法[J].信息通信,2020(07):54-55.
[2]王世彤,李書林,陳鑫鑫,崔素萍,王辛巖.應用5G來解決因視野盲區所引發交通事故的技術研究[J].科學技術創新,2020(27):81-82.
[3]彭同興,王丙龍,林偉權,周滔,鮑向文,王灝荃.彎道盲區可視化安全行車裝置設計與研究[J].山西電子技術,2020(04):77-79.
[4]劉武藝. 基于增強現實技術的船舶值班瞭望輔助系統研究[D].集美大學,2020.
[5]孫偉,楊一涵,王野,李亞丹.基于BEEMD的單目測距圖像區間閾值降噪算法[J].電子科技大學學報,2020,49(04):563-568.
