尹公洲單向控制段會船溝通平臺建設的探討
2020-01-03 10:07:30鄭立新車前程曹金海
中國水運 2020年12期
鄭立新 車前程 曹金海


摘 要:探討受控船舶在尹公洲單向控制段的會船溝通機制,對改善受控船舶在該水域的溝通聯絡和通航效率有著重要意義。尹公洲單向控制段作為長江下游著名的狹窄航段,大型船舶在該水域航行時需要單向通航,產生了會船通信的需求。目前,受控船舶間的會船通信主要在甚高頻的公共頻道上進行,易受干擾且效率較低,同時還占用信道資源影響其他正常通信,并影響VTS的正常工作。本文通過對現行會船通信機制進行分析,了解存在的問題和產生問題的原因,并針對性的提出改善建議。
關鍵詞:尹公洲;單向控制段;會船通信;平臺
長江尹公洲航段以其航道彎曲狹窄而為世人所知,素有“老虎口”之稱。船舶航經該航段時,需經歷兩個90度的彎道和一個狹窄航段,這給船舶的通航安全帶來很大影響,大型船舶尤為明顯。為改善該水域船舶的航行安全,海事部門將部分航段劃定為單向通航航段。但隨著船舶大型化的加劇和12.5米深水航道的開通,來往的大型、超大型船舶的增多,帶來會船通信量的越來越大,已出現會船聯絡機制越來越不能滿足實際使用需求的情形,給船舶通航安全帶來潛在隱患。為了解決現有問題,本文探討其他可行的通信途徑,來彌補現行通信機制的不足。
1 現狀
隨著12.5深水航道的開通和船舶的大型化,尹公洲單向控制段的受控船舶越來越多,現行的會船協商機制成為通航發展的制約因素,研究尹公洲航段特征、船流規律和會船協商機制成為改善制約的基本需求。
1.1航段特征
受地形和水流量影響,長江尹公洲航段(長江100號浮至長江105-1號浮)呈現“Z”形,整個航段內有兩個90度的彎道和一個狹窄航段。為保障船舶在該航段內的通航安全和通航秩序,主管機關將上、下端航段設定為單向控制航段,即100-101號浮和104-105~1號浮,實施單向通航管理;同時,在航段中段的90度彎道處,對受控船舶施行避免會船的要求。如圖1所示。
1.2船舶流量特點
尹公洲航段為京杭運河與長江的交匯航段,每日間大量的船舶航經該水域,既有國外的大型海輪,也有運河的船隊,水上交通十分繁忙。VTS作為水域的監管中心,承擔著信息傳遞交換、交通組織等工作,每日間大量的船舶在VTS工作頻道上進行動態報告和通信對話,2020年1-6月以來鎮江航段的船舶流量統計,如表1所示。
從表中可以看出,2020年上半年以來,鎮江轄區日均通航船舶數約1341艘次,其中向VTS中心進行動態報告的船舶約140艘次,占通航總數的10.46%。VTS中心接報的船舶數中,在尹公洲航段通航尺寸范圍內(110~230米)的受控船舶數約有82艘次,占VTS接報總數的58.69%。
1.3會船通信機制
目前,受控船舶間在尹公洲單向控制段前的會船通信主要在甚高頻(VHF)上進行,根據實際可將會船通信機制分為識別發現和通信協商兩步驟,如圖2所示。
現行的識別發現途徑有:①駕引人員通過在VHF公共頻道上的值守和AIS信息;②駕引人員在VTS工作頻道上詢問VTS值班人員來獲取相關受控船舶信息和動態;③VTS的值班人員根據受控船間的會遇態勢,主動對相關船舶進行信息服務、交通組織,并提醒相互間開展會船通信。
受控船舶間識別發現后,需要對通行單向控制段的順序進行溝通,會船溝通的特征有:①基本在VHF頻道上進行,常見于VTS工作的09頻道、長江公共的06頻道或者雙方約定的頻道;②通信協商的內容會涉及到動態、意圖的表達和交換,并協商會船地點和通行順序;③完整的協商通信是一個過程,需要多次成功的通信對話,而其中困難者需要多次通信協商。
2 問題
隨著受控船舶在VHF上通信溝通的常態化和船舶通信總量的增多,現行的會船通信機制在實際使用過程中,也帶來了諸多問題。
2.1存在遺漏
長江鎮江段內每日間通航船舶數量大,僅VTS接報的受控船舶就約82艘次,其中含有大量的受控江船。然而江船與海船之間在船用設備、法規遵守、人員素質等方面的差異,以及單向控制段上會船意識的淡薄,都可造成受控江船不參與會船協商通信,產生遺漏。
2.2占用通信資源
江中船舶間的通信主要通過甚高頻,由于高頻信道總數和時段資源的有限性,造成可供通信資源的有限性。目前,尹公洲航段受控船舶間的會船通信主要集中在VHF06和09頻道上,占用了信道上大量的時段資源,造成會船通信在通信資源的占用比例過高的現象,影響到頻道上的其他通信。
2.3增加VTS負擔
單向控制段的會船通信機制中與VTS存在交集的情況:①識別發現環節中,為獲得相關受控船舶的數據和動態,駕引人員常會通過詢問VTS中心來獲取;②后續會船協商中,當出現兩船會船意圖難統一的情形時,VTS中心會被請求或者主動介入,協調兩船間的會船順序。上述情況中與VTS相關的工作,非屬VTS的本身職責,是額外的工作,增加了VTS的工作量。
2.4易受干擾
由于受控船舶間識別發現中對VTS的過分依賴,當VTS出現設備故障、人員疏漏以及處理更重要的事務時,都會影響VTS的“橋梁”作用,從而影響后續的通信。同時,由于船舶間的通信過于依賴甚高頻,當甚高頻信道上嘈雜或其他通信介入時,都會對正常通信造成干擾。
3 原因分析
尹公洲單向控制段現行的會船通信機制下產生的諸多問題,根源在于船舶間發現、通信等方面的路徑太過單一,造成對VTS和甚高頻的過分依賴。
3.1發現難
受控船舶間發現難的主要原因有:
(1)工作量程小。長江鎮江段船舶密集,航段條件復雜,船舶通常在使用雷達、電子海圖、船E型、船訊網等設備系統時,為方便觀察周圍情況,會選擇較小的工作量程,很難跨過尹公洲航段進行觀察。
(2)AIS辨識度低。現行的A、B兩類AIS設備,受控船舶中均有使用,無法通過終端顯示符號進行區分;同時,混在密集船流中的受控船舶AIS信息,篩選識別十分困難。
(3)主觀能動不足。實際觀察發現,受控船舶中僅有極少量的船舶會主動表明自身動態意圖,來尋求相關受控船舶聯系,其余大部分都依賴于詢問VTS、VTS提醒和他船聯系,主觀能動性不足。同時,受岸線和船流的影響,受控船舶很少主動使用大量程去發現。
(4)VTS依賴大。當視距外的受控船舶很難通過AIS進行分辨時,VTS的“橋梁”作用最為有效,成為受控船舶間識別發現的首選。尹公洲航段岸線彎曲、視線的受阻、AIS篩選的困難,造成會船溝通中對VTS的過分依賴。
3.2通信難
受控船舶間通信難主要受以下因素影響所致。
(1)途徑單一。VHF因在超視距、近距離上通信的優勢和船舶強制值守的優點,成為船舶間通信、呼叫的首選,而其他通信方式在陌生人間使用的困難,最終導致VHF通信成為受控船舶間會船通信的主要選擇。同時,船舶值守頻道的集中,更造成會船通信集中于有限的幾個頻道上,極易互相干擾,影響通信效率。
(2)通信需要過程。受控船舶間的會船協商通信常需要經歷船舶識別、信息交換、會船協商等諸多過程,而每一過程都需要時間,成功的會船通信是建立于大量有效的通信基礎上。
(3)VHF工作模式。船用甚高頻通信不同于電話通信,其工作模式是單工狀態,即收發不同步,通信對話是對答模式,需要占用更多的通信時間。
(4)通信量大。尹公洲航段受通航環境限制,分別在上、下兩端設定單向控制段,受控船舶在整個尹公洲航段時需要分別對兩個控制段的會船順序進行通信協商,通信量翻倍。
3.3等讓難
尹公洲航段獨特的通航條件,使得受控船舶間的會船地點需要避開單向控制段和中段90度彎道處,導致可供船舶操縱的空間被進一步壓縮,給船舶的等讓帶來很大不便。
3.4其他原因
內河受控船舶駕駛員對單向控制段適用法規的不熟悉,以及溝通意識的淡薄,造成內河受控船舶在會船通信上參與度較低。此外,其他通信方式在陌生駕引人員間的應用困難,造成過于依賴于甚高頻的現象。
4 改善建議
解決受控船舶尹公洲單向控制段內的協商通信問題,實質上是解決通信需求和容量間的矛盾。主要解決途徑是減少對VTS和甚高頻通信路徑的依賴,建立更多的船舶識別和通信溝通路徑。
4.1建立受控船舶數據庫
為方便對受控船舶的識別和監管,降低臨時識別的難度和AIS信息的依賴,管理機構可建立受控船舶數據庫,來解決受控船遺漏和提高管理效率。管理部門可將受控船相關的船公司、船員單位和引航機構羅列組建管理數據庫,同時將受控船舶、駕引人員統籌組建終端通信和管理數據庫。
4.2宣傳引導
對不參與尹公洲單向控制段會船溝通的受控船舶,主管機關應加大對其駕駛人員和船公司的宣傳力度,告知單項控制端會船溝通的重要性,提高駕駛人員的安全意識和守法意識,引導他們主動參與會船溝通。具體可通過航行警告、航行通告的發布,微信、抖音、新聞媒體等平臺的信息推送,資料的現場發放,會議傳達等途徑來宣傳。
4.3開拓通信新路徑
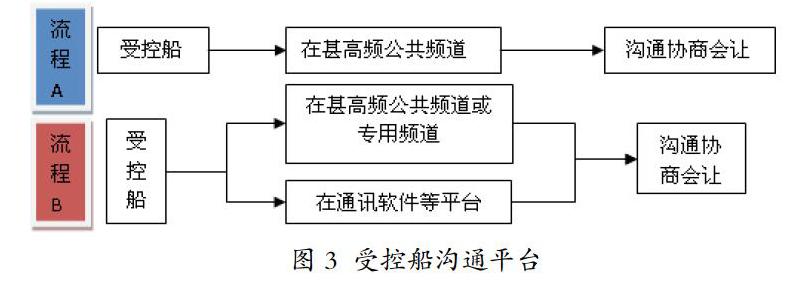
尹公洲單向控制段會船通信之所以滿足不了通信需求,主要原因是船舶間的通信路徑單一,形成通信路徑“串聯”化,極易造成信道擁堵。若提高通信效率和穩定性,開設更多的會船通信路徑,將通信路徑“并聯”化,是有效的解決辦法。如圖3所示。
實現通信路徑的“并聯”化,可采取的措施有:①在VHF CH06、09等公共頻道外,建立專用于尹公洲單向控制段受控船舶間的會船通信的頻道,供船舶間會船通信使用。②利用長江航段離岸近,移動通信方便的優點,引入QQ、微信、釘釘等通信軟件,將受控船舶的數據庫與通信軟件結合,將會船通信轉至通信軟件上進行,來釋放甚高頻資源。
4.4提高受控船舶識別度
提高受控船舶在會船前的自主識別發現,可有效降低對VTS的依賴,并減少高頻資源的占用。具體可行的措施有:①在現行的船用船舶監控平臺上,將受控船舶用獨特符號或標志予以顯示。如在船E行終端、船隊在線HiFleet、船訊網等平臺上將受控船舶用獨特的標志顯示,降低發現難度。②在受控船舶數據庫的基礎上,將數據庫中的船舶在船訊網、船隊在線HiFleet等船舶監控平臺上,利用相互關注、船隊管理等功能,來提高自主識別。③在AIS自動發送的信息碼中,編制表明受控船舶的信息碼,以在AIS設備接收端、電子海圖上顯示出獨特性,方便識別。
4.5開發新平臺
尹公洲單向控制段的會船通信需要經歷識別發現和會船溝通兩步驟,可開發集船位識別與通信功能為一體的平臺或者APP,來改善受控船舶間會船通信。平臺或者APP可設有船位自主報送,通信、船位跟蹤、信息提醒等功能,以此來降低對VTS和VHF的依賴,提高會船溝通的自主性和效率。
5 結束語
尹公洲單向控制段會船通信上的弊端,通信需求和資源有限性的矛盾,都需要變革現有的會船溝通模式,引入更多的會船溝通平臺,將路徑“并聯”化,降低對VTS和VHF的依賴性,來提高會船溝通的穩定性和效率。
參考文獻:
[1]江蘇海事局.長江江蘇段船舶定線制規定(2013)[EB/OL]. https://www.js.msa.gov.cn/art/2019/6/19/art_842_141.html ,2019.
[2]江蘇海事局. 中華人民共和國江蘇海事局船舶交通服務系統安全監督實施辦(2013)[EB/OL]. https://www.js.msa.gov.cn/art/2019/7/17/art_65_1124052.html,2019.
