路面隨機激勵下康復機器人輪椅的抑振解析
2019-12-31 05:01:46趙雷雷于曰偉周長城楊福興
上海交通大學學報 2019年12期
趙雷雷,于曰偉,周長城,楊福興
(1. 山東理工大學 交通與車輛工程學院,山東 淄博 255049;2. 北京郵電大學 自動化學院,北京 100876)
康復機器人輪椅屬于康復醫療機械,為康復病人進行身體鍛煉和參與社會活動提供了便利[1-2].隨著社會的發展,機器人輪椅使用者的出行需求在不斷增大[3].機器人輪椅在行進過程中,路面不平順隨機激勵導致的人體振動不可避免,對病人的康復和舒適性產生了不利影響[4].因此,如何有效降低機器人輪椅的振動引起了人們的極大關注.
近年來,國內外學者圍繞機器人輪椅的振動及舒適性問題展開了相關研究,但尚未給出抑制人體-機器人輪椅系統在路面不平順隨機激勵下振動的解析優化數學模型.文獻[5]對輪椅坐墊阻尼特性進行了研究,但未給出阻尼特性的匹配方法;文獻[6]為了便于輪椅減振系統設計,提出了兩段連桿式人體振動模型;文獻[7]分析了行進過程中輪椅的振動傳遞特性及對病人的影響,但并未提出有效的振動抑制方法.文獻[8]基于人體-輪椅6自由度模型對輪椅在正弦激勵下人體振動進行了仿真,但對機器人輪椅隨機振動沒有詳細研究,更未給出相應的抑制措施.文獻[9]基于Q-Learning算法提出了一種新的機器人輪椅使用者舒適性評價方法,這對機器人輪椅的振動及舒適性評價具有一定的參考價值,但未給出機器人輪椅抑振優化模型及方法.文獻[10]建立了電動輪椅坐墊舒適度數學模型,為輪椅設計提供了參考,但未提出坐墊減振特性匹配方法.由此可見,人體-機器人輪椅系統在路面不平順隨機激勵下的振動抑制方法有待進一步研究.
為了有效抑制人體-機器人輪椅系統的振動,本文以不平順隨機路面作為機器人輪椅典型行駛路況,建立人體-機器人輪椅垂向振動模型;探究路面不平順隨機激勵下人體-機器人輪椅系統的振動響應特性,進而創建人體-機器人輪椅抑振參數的解析優化模型及方法.
1 人體-機器人輪椅垂向振動模型
對于康復機器人輪椅,若建立復雜的振動模型進行振動分析,不僅需要大量的處理工作,而且在機器人輪椅的設計初期,建立精確振動模型所需要的參數常常是未知的.因此,需要對機器人輪椅進行簡化,以便快速地對輪胎、坐墊等減振元件的設計參數作出合理的選擇,避免反復試驗,從而降低研發成本.路面激勵對人體影響較大的振動主要集中在1.0~10.0 Hz.人體是一個復雜的振動系統,為了便于理論計算,將人體視為剛體質量并忽略機器人輪椅的幾何特征,創建人體-機器人輪椅垂向振動模型,如圖1所示.在該模型中,將坐墊及輪胎均簡化為具有線性剛度和阻尼的減振元件.圖1中:m1和m2分別為椅身質量和人體質量;K1和C1分別為所有輪胎的總垂向剛度和總阻尼;K2和C2分別為坐墊剛度和阻尼;z1和z2分別為椅身質量和人體質量相對于各自靜平衡位置的垂向位移;q為路面高程.輪胎及坐墊主要隔離垂向振動,故本文僅對人體-機器人輪椅的垂向振動進行分析.
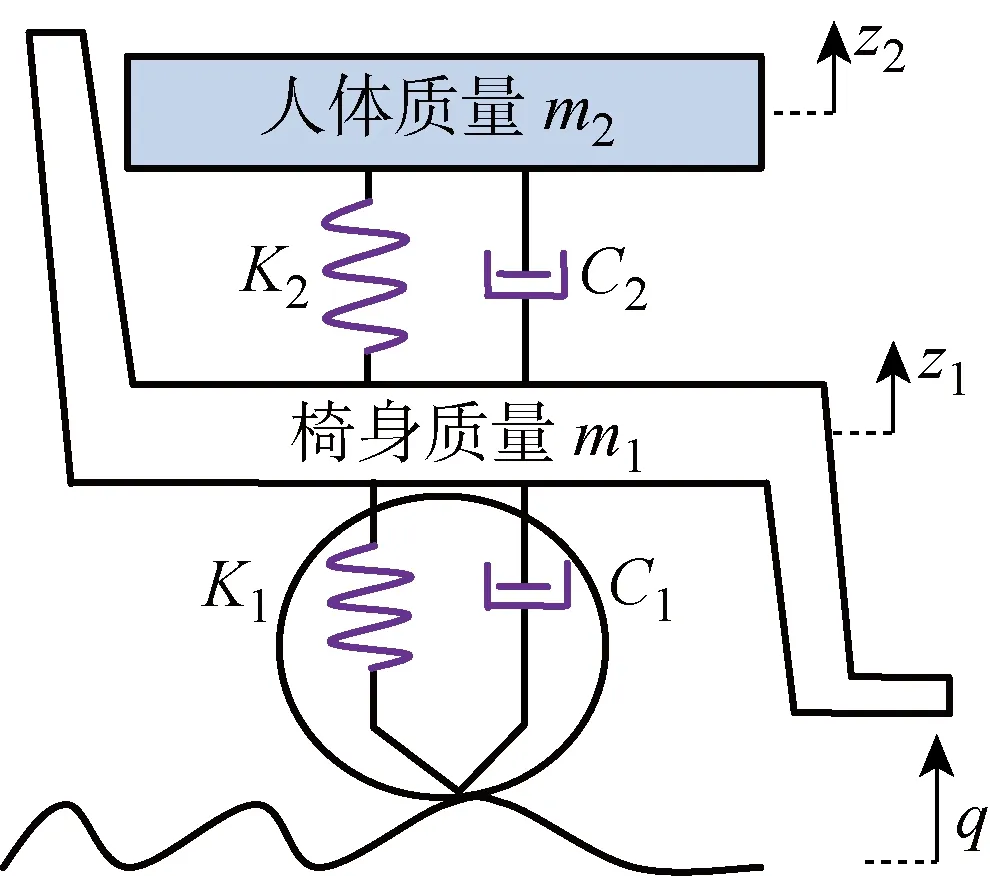
圖1 人體-機器人輪椅垂向振動模型Fig.1 Vertical vibration model of human-wheelchair
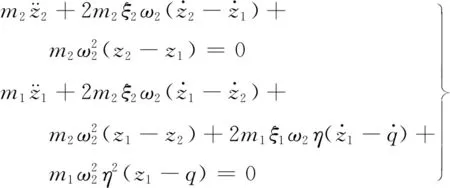
根據牛頓第二定律,可得上述模型的振動微分方程為
(1)
機器人輪椅常在人行道上行駛,其路面形式有水泥、瀝青及鋪磚等.不同路面的鋪裝形式對機器人輪椅通行的影響主要通過路面形成的激振頻率來完成.當機器人輪椅在瀝青或水泥等隨機路面上行駛時,可將路面譜抽象為滿足一定條件的白噪聲,其時域模型為[11]
(2)

上述隨機路面模型的速度功率譜密度可表示為
(3)
式中:ω=2πf且f為激振頻率.
2 振動響應解析式
幅頻特性分析能直觀地呈現振動系統在不同頻率下的減振性能,加速度方均根分析可用于整體減振性能評估[12-13].為此,本節基于人體-機器人輪椅垂向振動模型,推導了人體振動加速度頻響函數及方均根解析式,并提出了振動響應系數,進而實現振動響應的解析描述.
2.1 人體振動加速度頻響函數
僅討論人體-機器人輪椅系統的質量、剛度及阻尼參數,只能對特定的康復機器人輪椅進行振動分析和設計.因此,為了使討論的物理量具有更廣泛的理論指導意義,引入以下輔助變量:

其中:rk為剛度比;rm為質量比;ω1為椅身無阻尼固有圓頻率;ω2為人體無阻尼固有圓頻率;ξ1為輪胎減振系統的阻尼比;ξ2為坐墊減振系統的阻尼比;η為固有圓頻率比.
根據引入的變量,對式(1)進行恒等變換,可得
(4)
對式(4)化簡,可得
(5)

ξ1η+ξ1rm)ω2+ω4]
(6)
式中:j為虛數單位.
2.2 人體振動加速度方均根響應及響應系數
(7)
(8)
式中:h(t)為脈沖響應函數.
人體振動加速度的功率譜密度可表示為
Ga(ω)=E[a(t)a(t+τ)] =
(9)
將式(3)代入式(9),可得
(10)
人體振動加速度方均根響應可表示為
(11)
將式(10)及代入式(11),整理可得
(12)
根據留數定理,對式(12)積分,可得
(13)

對式(13)進行恒等變形得
(14)
式中:ρ定義為人體振動加速度響應系數,即

(15)
由式(15)可知:ρ的單位為s-1.5;ρ與rk,rm,ω2,ξ2及ξ1有關,與u及Gq(n0)無關.可見ρ僅由人體-機器人輪椅系統參數決定;ρ值越小,表征機器人輪椅在隨機路況下的減振性能越好.
3 人體-機器人輪椅的抑振分析及優化模型
3.1 人體-機器人輪椅阻尼參數的抑制規律分析
輪胎和坐墊作為減振元件,其剛度主要起到支撐和振動緩沖作用,而其阻尼起到振動衰減作用.為了有效抑制并衰減人體-機器人輪椅系統在路面不平順隨機激勵下的振動,下文重點分析ξ1和ξ2對人體振動加速度頻響函數及ρ的影響規律.

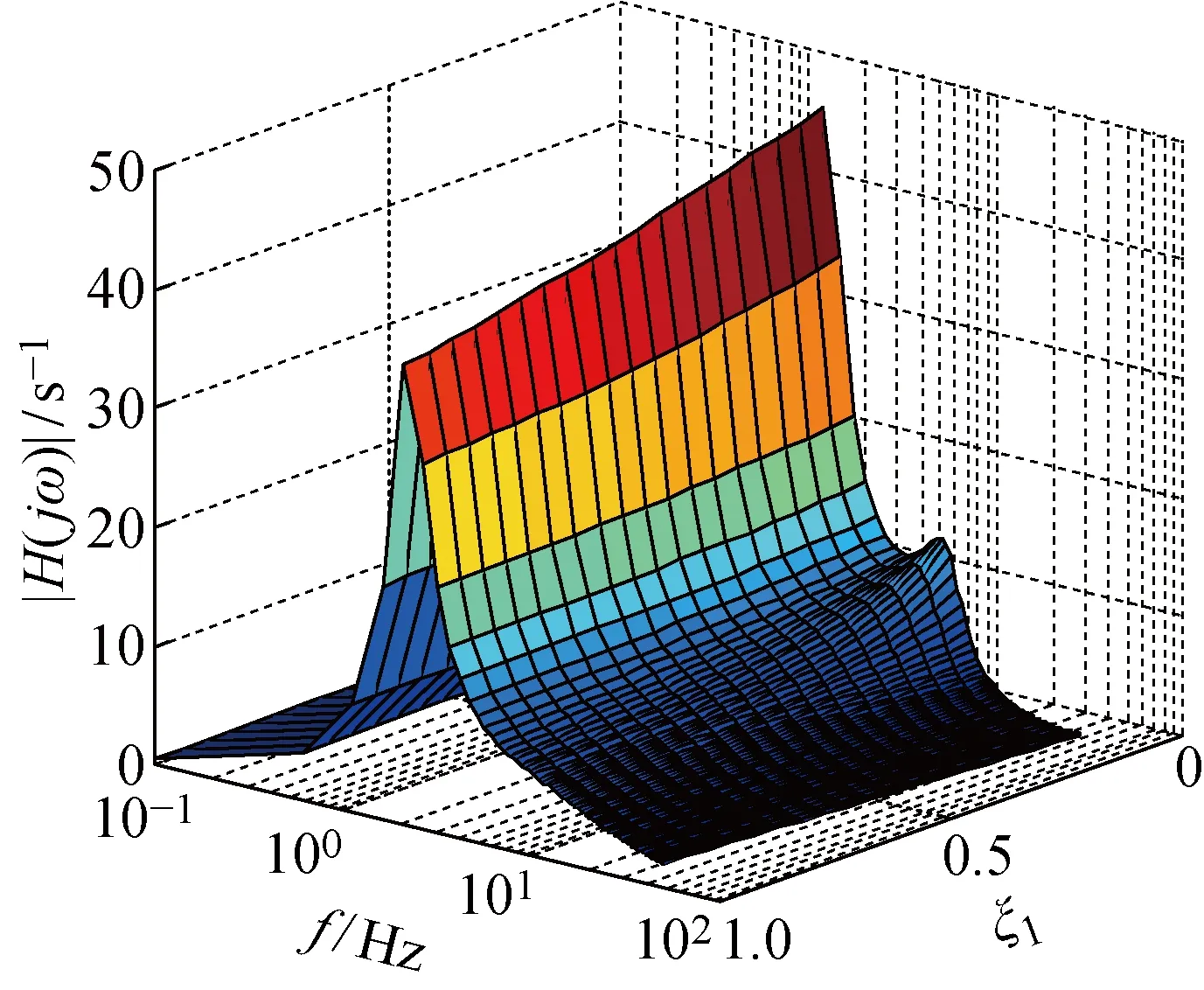
圖2 不同ξ1時的|H(jω)|Fig.2 Surface of |H(jω)| with different values of ξ1
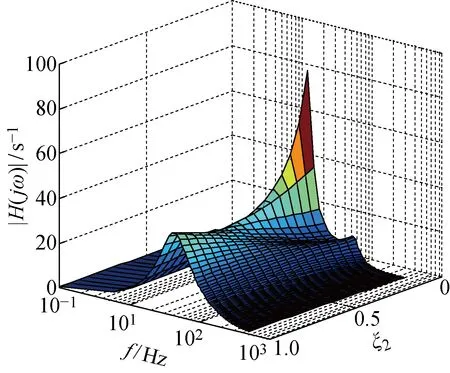
圖3 不同ξ2時的|H(jω)|Fig.3 Surface of |H(jω)| with different values of ξ2
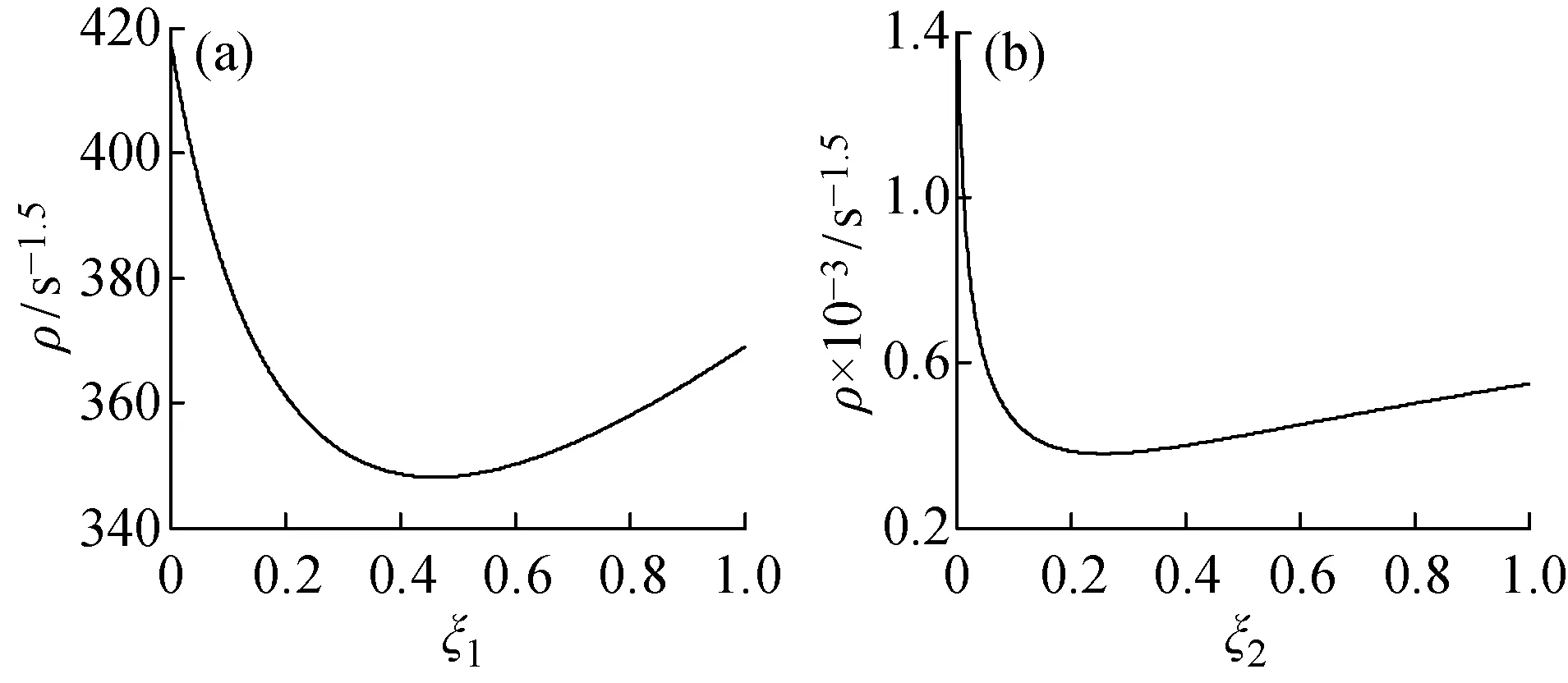
圖4 ρ隨ξ1和ξ2的變化曲線Fig.4 Curves of ρ versus ξ1 and ξ2
由圖2可知:人體和椅身共振頻率分別為2.4和9.0 Hz;當ξ1較大時,可有效抑制人體和椅身共振峰值,但卻引起了10.0 Hz后區域幅值的增大.由圖3可知:增大ξ2可有效降低人體共振峰,且對椅身共振峰影響很小,但卻引起了兩共振峰之間非共振區幅值的明顯增大.由此可見,ξ1和ξ2過大或者過小均不利于抑制人體-機器人輪椅系統的振動.圖4(a)表明,ρ隨著ξ1的增大先減小后增大,故ξ1存在最優值使ρ最小化.由圖4(b)可知,ξ2也存在最優值使ρ最小化.因此,可通過優化ξ1和ξ2降低人體-機器人輪椅系統的振動.
3.2 人體-機器人輪椅抑振參數的解析優化模型
以ρ最小為優化目標,以ξ1和ξ2為抑振優化變量,建立目標函數J:
min{J(ξ1,ξ2)}=min{ρ}
(16)
坐墊減振系統和輪胎減振系統均為小阻尼隔振系統,故滿足如下約束條件:
(17)
對式(16)求ξ2的偏導數并令其等于0,得
(18)
式中:






對式(16)求ξ1的偏導數并令其等于0,得
(19)
式中:






聯系式(18)和(19),可得
(20)
式(20)所有解中滿足式(17)的實數解即為使得目標函數J最小化的最優解,簡記為(ξ1op,ξ2op).最優解(ξ1op,ξ2op)僅與rk和rm有關,與u及Gq(n0)無關.
在求得(ξ1op,ξ2op)后,根據ξ1和ξ2的定義式,可得輪胎及坐墊的最優阻尼(C1op,C2op)為
(21)
4 優化實例及數值模擬
某型號四輪康復機器人輪椅系統的參數為:K1=80 N/mm,K2=16 N/mm,m1=25 kg,m2=70 kg;機器人輪椅行駛工況為:u=1.0 m/s,水泥人行道Gq(n0)=2.56×10-4m-3.
4.1 解析優化設計
根據上述解析優化模型,可得ξ1op和ξ2op分別為0.55和0.22,C1op和C2op分別為 1 556 N·s/m和466 N·s/m,每個輪胎的阻尼為389 N·s/m.機器人輪椅以u=1.0 m/s行駛在Gq(n0)=2.56×10-4m-3的水泥人行道上時,根據式(13)可得不同ξ1和ξ2情況下的σa,如圖5所示.當ξ1=0.554且ξ2=0.219 5 時,σa最小且最小值為0.56 m/s2.此外,根據解析優化結果,可知輪胎及坐墊的最優阻尼比分別在0.5和0.2左右,避免了傳統上在0~1之間選取阻尼比的盲目性.
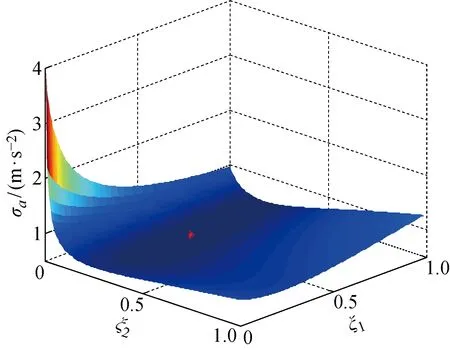
圖5 不同ξ1和ξ2時的σaFig.5 Surface of σa with different values of ξ1 and ξ2
4.2 數值模擬
以式(2)生成的時域信號作為輸入,利用MATLAB軟件自帶的ode45算法對式(1)進行求解,進而對機器人輪椅行進在隨機水泥路面時的人體振動加速度進行數值模擬.輸入信號如圖6所示.

圖6 水泥路面不平順隨機激勵信號Fig.6 Random excitation signal of cement pavement
以σa最小為目標,C1和C2為變量,利用遺傳算法進行優化.當σa達到最小值時,可得C1=1 551 N·s/m,C2=469 N·s/m.解析優化模型得出結果與其相對偏差分別為0.3%和0.6%,表明解析優化模型與數值模擬是一致的.解析優化模型與機器人輪椅u及Gq(n0)無關,故無需建立數值模型進行多次模擬優化.與以C1和C2為優化變量相比較,解析優化模型以無量綱阻尼比ξ1和ξ2為優化變量,更具有理論指導價值.因此,該模型便于指導輪胎和坐墊的快速選型及設計.
5 結語
本文建立了人體-機器人輪椅垂向振動模型,提出了機器人輪椅在隨機路面激勵時的人體振動加速度響應系數ρ;以ξ1和ξ2為優化變量,創建了人體-機器人輪椅抑振參數的解析優化模型.通過理論分析、實例優化及模擬驗證,可知:
(1)ρ僅由人體-機器人輪椅系統參數決定;ρ值越小,則機器人輪椅在隨機路況下減振性能越好.
(2) 增大ξ1,可同時抑制人體和椅身共振峰值,但會引起椅身共振區后區域幅值增大;增大ξ2可有效降低人體共振峰,對椅身共振峰影響很小,但會引起人體和椅身共振峰之間區域幅值的明顯增大.
(3) 解析優化模型得出優化結果與數值模擬結果的相對偏差分別為0.3%和0.6%,證明了解析優化模型的正確性.
(4) 解析優化模型與機器人輪椅行進速度及隨機路面譜密度無關,僅和人體與椅身的質量比及輪胎與坐墊的剛度比有關,且以無量綱的阻尼比ξ1和ξ2為優化變量,便于指導康復機器人輪椅設計人員快速進行輪胎和坐墊選型及設計.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40