汽車行駛狀態無跡卡爾曼軟測量
2019-12-31 08:44:34郭立新
中國工程機械學報 2019年6期
關鍵詞:測量
郝 亮,郭立新
(1.東北大學 機械工程與自動化學院,遼寧 沈陽 110819; 2.遼寧工業大學 汽車與交通工程學院,遼寧 錦州 121001)
分布式電動汽車可容易實現EPS/DYC/VSS等多系統集成整車控制,而控制的關鍵是車輛運動參數的準確獲取,但有些參數(如質心側偏角)測量難度大、成本高,而軟測量技術在車輛動力學與運動學參數上進一步應用可以有效解決這一問題.例如:文獻[1-2]進行了車輛運動狀態、輪胎壓力和路面附著系數的卡爾曼估計;文獻[3-4]提出雙擴展卡爾曼,同時估計了車輛運動狀態與參數;文獻[5]采用雙無跡粒子濾波卡爾曼,同時估計了車輛運動狀態和參數;文獻[6]采用擴展卡爾曼和無跡卡爾曼,同時估計車輛的側向輪胎力,并驗證了無跡卡爾曼要高于擴展卡爾曼的估計精度;文獻[7-8]分別提出了無跡卡爾曼和自適應無跡卡爾曼,對車輛運動狀態與路面附著系數進行估計,從兩者效果實際應用角度來看均可滿足實際使用需求.以上都是針對傳統車輛的狀態估計,而結合分布式電動汽車的特點,實現的軟測量運動參數較為少見.因此,本文基于無跡卡爾曼濾波(Unscented Kalman Filter,UKF)建立了電動汽車狀態軟測量算法,該算法通過聯合仿真,進一步驗證了它的有效性.
1 車輛7自由度動力學模型
如圖1所示,建立了具有縱向、側向車速、橫擺角速度和4個車輪轉角7自由度動力學模型,由此可推導出動力學方程:
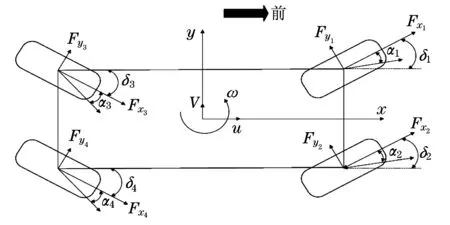
圖1 車輛7自由度的動力學模型Fig.1 Vehicle 7 freedom degrees dynamic model
(1)
式中:u為縱向的車輛行駛速度;m為電動汽車整車整備的質量;v為側向的車輛行駛速度;β為車輛運動質心的側傾角;ω為車輛運動的橫向擺動角速度;ax為縱向運動的加速度;ay為側向運動的加速度;Г為繞z軸的橫擺力矩;Iz為繞z軸的橫擺轉動慣量;δi為電動汽車的四輪轉角;Fxj為車輪的縱向力;Fyj為車輪的側向力;i,j為1(左前)、2(右前)、3(左后)、4(右后);Fw為車輛運行的空氣阻力;a,b為質心至前、后軸的縱向距離;tf,tr為前、后軸的輪距.
2 魔術輪胎模型
汽車運行過程當中的縱向和側向力分別為[9]
其中,
式中:Cx為輪胎縱向剛度;Cy為輪胎側向剛度.
在制動和驅動模式時,滑轉率為
式中:Re為車輪滾動半徑;ωij為車輪轉角速度;vij為車輪中心的速度;uij為車輪中心的側速度.
垂直載荷可用下式計算:
(6)
式中:Fzp為車輪運動過程中垂向力,p為1(左前)、2(右前)、3(左后)、4(右后);hg為質心的高度.
3 UKF的軟測量算法
運動狀態的實時估計、模糊推理、神經網絡與機理的建模都屬于軟測量的范疇[10],軟測量不需要硬件,通過融合方便測量的參數,進而實現高成本檢測參數的測量.UKF的均值和協方差預測的是一種非線性過程,可以通過無跡變換(Unscented Transformation,UT)來解決這個問題[11].UKF不忽略高階項,與EKF相比無截斷誤差,因此,估計精度、穩定性方面要高于EKF.
將電動汽車運動式(1)離散化,可得
(7)
系統觀測方程離散化形式為
(8)
式中:運動狀態的參數為X=[u,v,ω,T,ax,ay]T;觀測的輸出參數為Z=[axay]T;過程控制參數為u=[δi,ax,ay];Δ(k)為過程噪聲協方差;(k)為觀測噪聲的協方差.
(1) 西格瑪的采樣點X
(9)
(2) 計算這些采樣點相應的權值
(10)
式中:n為正整數;l,d下標分別為均值與協方差;λ=α2(6+κ)-6為縮放的比例參數,α為有效控制西格瑪點分布的狀態,通常α=0.001;κ為待選的參數,取值κ=0;β≥0,決定了高階項的動差,取β=2.
(3) 通過式(9)和式(10)得到的西格瑪點集和權值,進一步得到一步的預測X(i)(k+1|k),系統狀態量的預測與協方差陣為
X(i)(k+1|k)]T+Q
(11)
(4) 根據一步預測值,再次使用UT產生新的西格瑪點集為
(5) 將產生新的西格瑪點集帶入式(8),得到西格瑪點集的觀測的預測值為
預測的觀測均值和協方差為
(12)
(13)
4 軟測量算法的仿真驗證
4.1 聯合仿真模型的搭建
由于Carsim整車動力學仿真軟件具有參數設置靈活、離線仿真速度快、更加貼近實車實際運行情況,且提供了與Simulink的接口,可以方便進行控制算法驗證等優勢[12-13],整車的參數如表1所示.建立的Carsim/Simulink聯合仿真平臺如圖2所示,對軟測量算法有效性進行驗證.

表1 電動汽車參數值Tab.1 Electric vehicle parameters
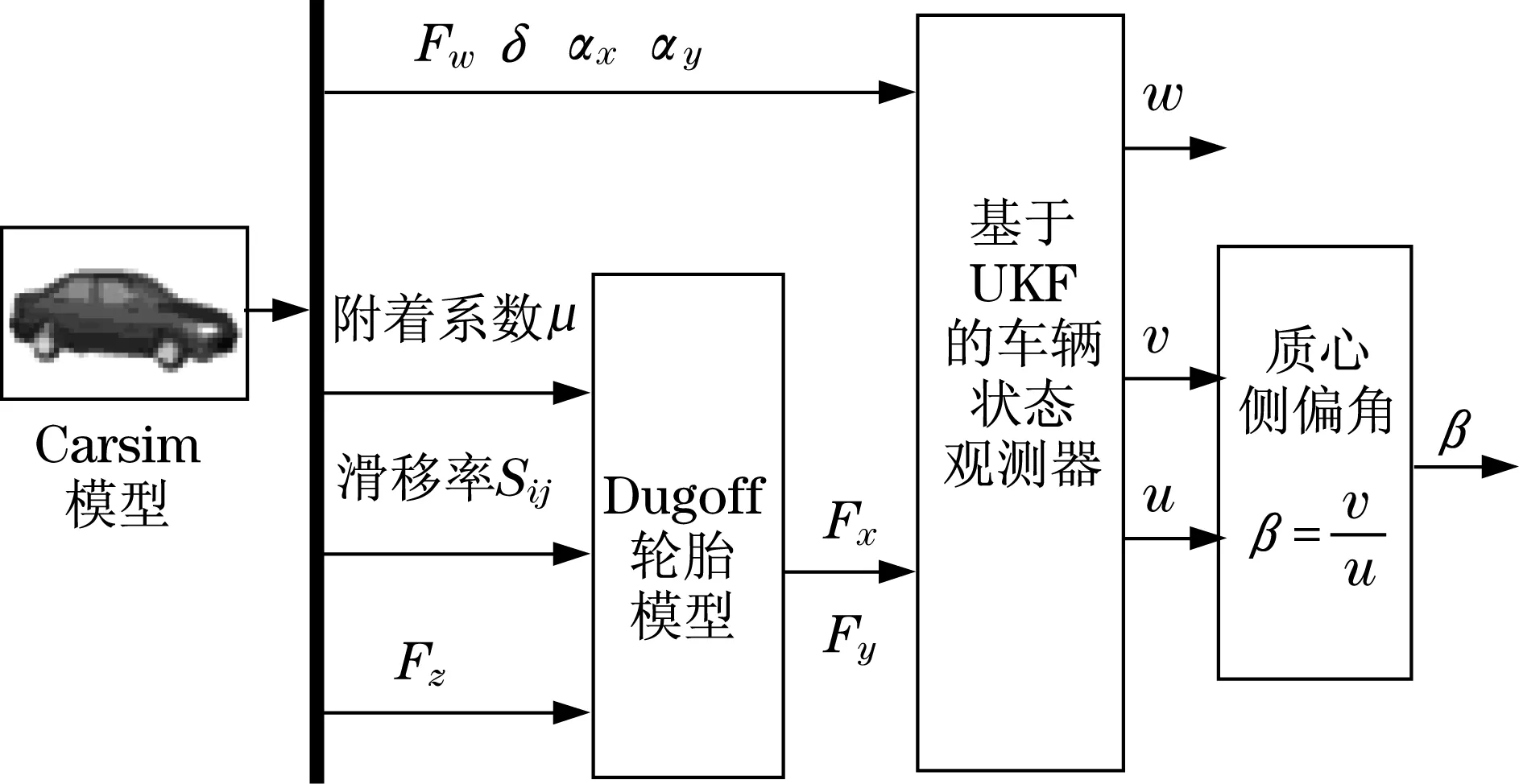
圖2 電動汽車行駛狀態UKF估計仿真框圖Fig.2 UKF estimation simulation diagram of electric vehicle driving state
4.2 仿真結果分析
雙移線實驗完全按照ISO 3888-1標準規定進行設計,電動汽車初始運動狀態值在Carsim中設定為x(t0)=[60/3.6,0,0,0,0,0]T,仿真時間步長設置為0.01 s,選取路面的附著系數是0.5,通過反復調試,確定了過程噪聲和量測噪聲的協方差陣分別是:Q=I6×6×0.01,R=I2×2×0.001.
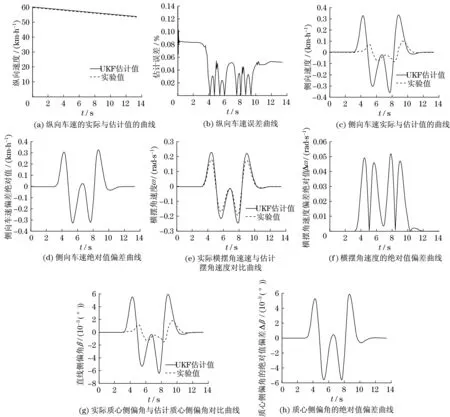
圖3 60 km/h雙移線仿真實驗曲線Fig.3 Simulation experiment curve of 60 km/h double lane change
通過圖3(a)和圖3(b)可看到,UKF的估計精度非常好,最大的相對偏差僅為0.001 4,有效證明了估計算法的準確性;圖3(c)和圖3(d)所示,實際運行過程中,UKF側向車速估計值和側向車速偏差絕對值即使中間過程有較大的波動,但是最終均能收斂于真實值;圖3(e)和圖3(f)可看到,橫擺角速度的最大絕對值偏差出現在8 s的位置,最大偏差值并未超過0.053 rad/s,且經過14 s的時間過程,估計值收斂于實際值,達到了很高的估計精度;由圖3(g)和圖3(h)可知,質心側偏角的絕對值偏差也是出現在9 s,且沒超過0.006°,而且最終估計值可收斂于實際值,估計精度較高.
5 結論
依據電動汽車的7自由度動力學模型建立了UKF軟測量算法,融合了低成本傳感器測量的縱、橫向加速度和轉向盤轉角信號,可以較為準確地估計車輛縱、橫向速度,橫擺角速度和質心側偏角行駛狀態參數.通過正弦的聯合仿真實驗進行了算法驗證,由實驗結果知UKF具有良好的測量精度和收斂性,可滿足實際測量的需求.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
