挖掘機虛擬仿真訓練實驗的分析與構建
2019-12-23 09:28:13畢瀚文張引瓊
電腦知識與技術 2019年31期
畢瀚文 張引瓊


摘要:工程機械的高學習成本及高危作業方式,該項目將虛擬仿真作為教學項目的研究對象。本文闡述了基礎模型構建和仿真系統的構建方式,為相關仿真實驗制作提供方向。
關鍵詞:虛擬仿真;工程機械;教學實踐;虛擬實驗;三維建模
中圖分類號:TP311 文獻標識碼:A
文章編號:1009-3044(2019)31-0267-02
挖掘機虛擬駕駛視覺仿真器為安全教育和駕駛訓練提供一個良好的平臺。在成本上和風險承擔上大大減輕了駕駛訓練者和教育機構的負擔。采用虛擬仿真實現挖掘機的虛擬駕駛,具有安全、環保和不受時間、天氣等限制的特點。同時需要借助相關的圖形學、動力學仿真、網絡技術分別應用于駕駛仿真器的部分,并清晰地展露了較大空間的使用前景。
1虛擬仿真實驗環境的構建
1.1仿真環境的三維建模
挖掘機虛擬仿真實驗中涉及大量的三維模型,由于模型構建在系統中的資源占用程度較高,為了減輕開發過程工作量,借助3DsMax或其他三維建模軟件,完成構建和優化。
仿真實驗講究真實性,由于和跟現實生活相關的特性,所以制作的模型不能有違常理,在制作的過程中需要充分把握物體的客觀表現,真實的還原。因此,在開始制作模型之前,采集現實物體的圖片作為參考圖,做足夠的調研或考察,對于細節的刻畫拍攝越精細越好,以便后期制作的呈現更準確。嘲實地考察挖掘機的機械結構,根據其外形特點對挖掘機進行大體塊劃分,如分為:動臂、斗桿、鏟斗、轉臺、駕駛室、履帶、驅動輪等。通過3DMax建模軟件進行簡單的Box堆疊,不需要對各種細節進行刻畫,有助于把握整體結構特征。
如表1示,通過3D手繪建模與次世代建模的對比可以看出,次世代的建模流程相對傳統3D手繪過程步驟復雜。傳統3D手繪為了節省系統資源,只制作低模,以達到用最少的面表現較好的效果。為了逼真的還原效果,采用次世代建模方式,模型的初始制作需先建立高模,后進行細分高模,制作低模,從而可以讓程序占用資源少但效果相差無幾。“最重要的步驟是利用高模烘焙的法線貼圖回貼到低模上,這一方法流程能有效減少因為高模三角面過多資源占用過載的問題,同時使得在開發引擎中的低模顯示效果和高模一致,滿足實現效果。
1.2三維模型重構
由于在3DMAX中創建的3D模型導入Uni-ty3D會產生坐標錯位、材質和模型無法獨立、比例出錯的問題,故需針對這三方面的問題進行模型重構,常見重構方法如下:
1)工程機械三維模型x軸向偏轉重構
Unity3D和3DMax采用的是分別是左、右手坐標系,所以基于3DMax的模型導入Unity3D后,x軸會自動偏轉270度。在項目制作過程中需要重復調整模型的角度,給工程實現帶來一定的困難,為了加快開發速率,在模型導出時選擇導出為.3Ds,模型的坐標就會保持一致。
2)工程機械三維模型材質和部件重構
制作好的.FBX或.3Ds模型導入到Unity 3D過程中都會丟失材質,但Unity 3D會自動創建相應材質的材質球,將材質球賦給模型即可。在模型制作過程中盡量采用Box組合方式,便于可操作機械結構在代碼編程的過程中拆解為組件,才可以正常的讓裝置移動、轉動。
3)工程機械三維模型的縮放重構
在默認情況下,Unity3D中的一單位是FBX文件中的一單位的一百倍,所以需要適當地在3DMax中調整三維模型的比例大小,同時要讓模型在場景中居中,使得導人物體的重心位置正確。
1.3次世代貼圖技術
傳統的貼圖技術采用二維圖片平鋪在三維模型上,對性能要求較低,完全可以滿足一般的應用場景,但由于缺乏立體效果,模型效果不真實。所以采用高質量的次世代中貼圖,貼圖中包含顏色、高度、光線與法線角度等一系列模型信息,貼圖類型一般包括了法線貼圖、漫反射貼圖、高光貼圖(Specular Map)、凹凸貼圖、自發光貼圖、環境閉塞貼圖,組合而成一整套貼圖。
由于貼圖的不同性質,不是所有的模型都需要以上全部貼圖,在最基本、并節省資源的情況下至少需使用法線、漫反射、高光貼圖才能夠真正地表現出較高的視覺效果。在3DMax中制作完成的高模或者低模經烘焙后,輸出格式為FBX文件,利用ZBrush雕刻工具可進行細節雕琢,制作漫反射貼圖,使模型的還原度更高。
1.4虛擬仿真實驗平臺搭建
利用Unity3D的地形工具在場景中建立不同地形場景。工程機械由的各個組成部分,能夠進行操作的屬于工作裝置,每一部分需要在模型導入Unity后進行組合,以便編寫程序對各個模型部分的引用。
挖掘機虛擬仿真框架構建如圖1所示,在用戶進入實驗后,初始化數據,等待用戶進行操作作為輸入數據,輸入數據經過輸入核心進行數據處理后,傳人Controller控制器,Controller控制器中包含了挖掘機的初始狀態、大小臂操作桿的位置、鏟斗操作桿的位置、上部轉機操作桿的初始位置、車輛所處位置等信息,調整對應參數,數據分類后交由Model模型,Model模型中包含作業管理器、物理系統、音頻管理器、場景系統、uI管理器,由已經封裝好的方法對數據進行處理,挖掘機會在View視圖中顯示大小臂的移動、鏟斗的挖掘、車輛數據信息、進行相應的移動、轉向等動作,用戶得到反饋后可進行下一操作。
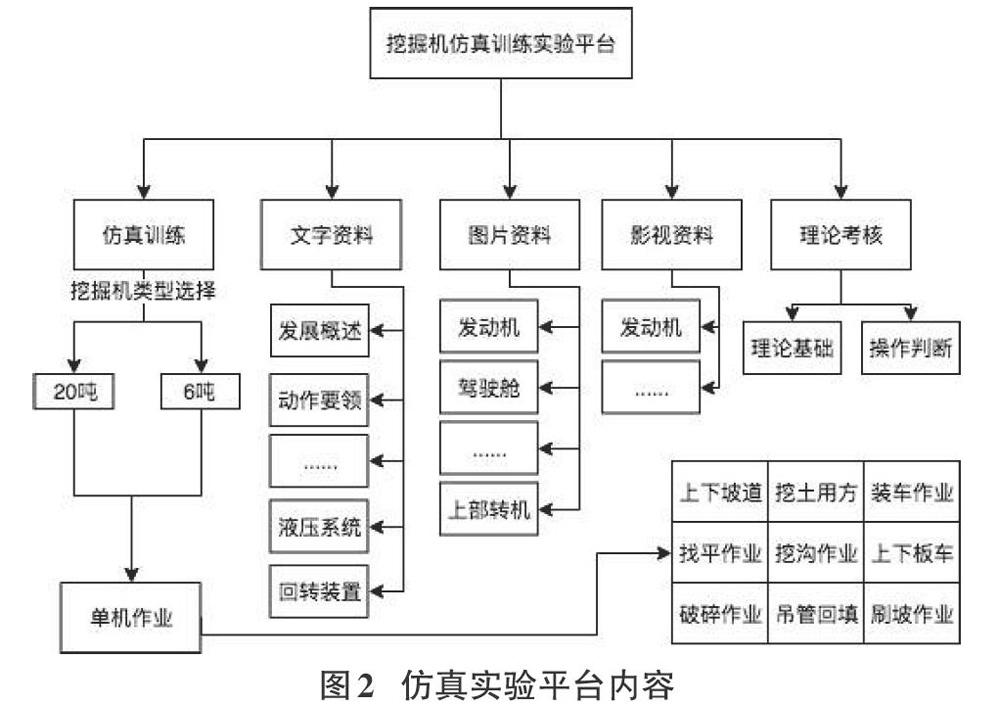
2挖掘機仿真實驗內容
挖掘機仿真實驗平臺的實驗內容以挖掘機的操作實踐操作為主,同時還可以兼顧傳統教學,充分發揮虛擬仿真平臺的優勢。將系統分為五個部分,分別為仿真訓練、文字資料、圖片資料、影視資料、理論考核。
同時,為了滿足不同訓練的需求,仿真項目提供了20噸和6噸兩種不同型號的挖掘機供訓練者選擇。進入訓練后,根據實際的操作內容進行場景選擇,分別為上下坡道、挖土用方、裝車作業、找平作業、挖溝作業、上下板車、破碎作業、掉管回填、刷坡作業共九個作業場景。文字資料、圖片資料以及影視資料作為輔助學習資料,理論考核中包含理論基礎和操作判斷內容,檢測學習者知識掌握隋況。
2.1挖掘機輸入操作模塊
挖掘機仿真實驗平臺采用了多平臺輸入方式,InputCore中對不同平臺數據進行處理,提供了單片機、操作桿、遠程遙控三種APT可供使用,InputDataRaw中保存原數據,InputDataNornlal將獲取的原數據進行標準化,根據不同類型的設備完成數據映射。
為了保證訓練過程充分有效,每一個作業項目斗必須按照相應的流程進行操作,對挖掘機的位置、大臂張合角度、小臂張合角度、鏟斗張合角度、斗齒位置、行駛速度、轉臺旋轉角度等、數據進行封裝,在操作流程中,安全檢測模塊監測各項數據,在訓練過程中出現操作不當、位置錯誤后給出相關提示信息,以便訓練者明白操作錯誤原因,達到訓練效果。
3結束語
采用虛擬仿真技術模擬挖掘機工程機械的實驗教學操作,訓練者可在單位時間內有效的學習駕駛技術,對于工程車輛學習和職業教育有很大的幫助。然而,該系統的功能比較單一,還需要通過更深層次的開發,才能更好地發揮仿真實驗的作用。
猜你喜歡
商品與質量(2021年43期)2022-01-18 05:27:58
銅業工程(2021年2期)2021-06-27 10:36:24
銅業工程(2021年1期)2021-04-23 01:45:08
表面工程與再制造(2019年1期)2019-12-04 15:10:07
汽車觀察(2018年9期)2018-10-23 05:46:44
都市家教·下半月(2016年11期)2016-12-29 17:53:11
教育教學論壇(2016年46期)2016-12-19 21:04:03
電腦知識與技術(2016年26期)2016-11-24 16:24:32
電腦知識與技術(2016年13期)2016-06-29 20:39:26
科技視界(2016年8期)2016-04-05 09:14:32
