基于STM32的智能電動小車設計
2019-12-23 09:28:13彭聰彭琛聶超凡
電腦知識與技術 2019年31期
彭聰 彭琛 聶超凡


摘要:本文設計的電動車采用簡單普遍的人工智能技術,本課題實現的功能是電動車在規定的時間內完成從蹺蹺板的起始端出發,行駛到蹺蹺板中心點附近,并且在中心點附近找到平衡位置停留幾秒,然后從平衡點出發到蹺蹺板末端停留幾秒鐘,再從末端倒退回起始端。根據以上的要求采用STM32F103RCT6作為小車的檢測和控制核心,通過12V電池及降壓模塊,以L298N來驅動減速電機,電機驅動采用PWM計數,方便對小車車輪正傳和反轉的控制。小車通過紅外對管來進行尋跡行駛和檢測黑帶來保證在蹺蹺板上直線行走。用MPU6050角度傳感器作平衡檢測,來檢測蹺蹺板的傾斜度,再把相應信號傳給STM32F103RCT6去控制車輪的轉速以及方向使電動車運行到使蹺蹺板達到平衡的位置,從而達到調節平衡的目的。同時,小車在蹺蹺板行駛過程中,通過LCD顯示屏實時行駛時間以及在蹺蹺板的首末端和平衡處給出相應的指示,便于人機交流。
關鍵詞:STM32;MPU6050;紅外傳感;減速電機;LCD顯示
中圖分類號:TP3 文獻標識碼:A
文章編號:1009-3044(2019)31-0197-03
1概述
在現在這個發展迅速的科技信息時代,科技中的智能化很快地融入到了人們的日常生活當中,車子的智能化也不離其外。智能小車的技術得到了普遍的應用,可用到安全監測、排除險情及智能家居等領域。軍事上,在車上裝備攝像機、安全激光測距儀和衛星全球定位儀等設備,通過光纜操縱,完成偵察和監視敵情、情報收集、目標搜索和自主巡邏等任務。在家庭中,可以用智能小車進行家具、遠程控制家中的家用電器,控制室溫等等。對這種小車的研究,將為未來環境探測術上的有力支持。
2系統硬件設計
如圖1所示,小車以STM32F103RCT6為控制芯片,通過發送PWM波給驅動電路,從而控制電機帶動車輪的正轉反轉,在蹺蹺板上通過PID調節進行紅外循跡和平衡檢測,在運行的過程中通過LCDl602顯示屏實時顯示開始小車行駛時間。
在板子兩邊貼兩個接近蹺蹺板寬度的長條黑線作為電動車出發的起點和終點標志,小車從起點出發后,在30秒內到達中心點附近,通過角度傳感器傳輸到ARM的信號,來判斷蹺蹺板的傾斜角度,經過PID算法的調節,找出傾斜角為0的位置,小車在中心點附近來回行駛,在60秒內找到平衡點,并且在平衡點處停止5秒。之后,在30秒內繼續向前行駛到終點處,并且停止5秒。5秒后,通過控制車輪的反轉,在1分鐘內倒退回到起始點,在整個行駛過程中,電動車始終在蹺蹺板上,并且分階段實時顯示電動車行駛所用時間。
2.1電源供電模塊
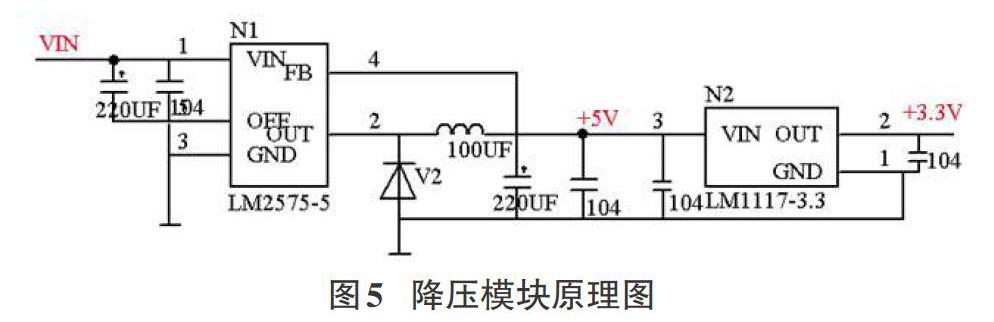
如圖4所示,12V的航模電池給為降壓模塊和驅動電路的輸入電源,驅動模塊輸出的5v可給單片機供電,降壓模塊輸出的5v可作為5v降3.3V模塊的輸人,同時可給循跡模塊和顯示模塊5V供電。降壓模塊輸出的3.3V供電給平衡模塊。
為了確保控制小車電路的穩定運行,設計一個輔助電源用來提供穩定的+12V、+5V、+3.3V,實則為一個降壓模塊。輔助電源電路用到了LM2576-5和LMlll7-3.3這兩種性能較高的降壓穩壓器,分別用來12V轉5v和5V轉3.3V。
2.2 L298N電機驅動
L298N作為專用驅動集成電路,在本課題中該驅動模塊是用來驅動直流電機。12V輸人給電機驅動供電則5v輸出給開發板供電。STM32通過PB6、PB7、PB8、PB9這4個引腳連接到該模塊的邏輯信號輸入端口輸出兩對PWM波進行控制占空比,同時驅動模塊的馬達輸出口連接需要驅動的直流電機,從而達到控制車輪的正反轉以及速度的目的。
2.3 LCDl602液晶顯示屏
設計了LCDl602的外圍電路,V0為液晶顯示器對比度調整端,連接了一個5K的可調變阻器進行對顯示器對比度的調節,來調節顯示字符的清晰度。STM32的PC8-PCI5這8個端口連接D0-D7進行數據傳輸,PC0控制使能端E,PCI控制寄存器選擇端Rs,PC2控制讀寫選擇端。每完成一個階段性的任務就把時間刷新一遍,從而達到實時分段顯示小車行駛過程中的所有時間。
2.4 TCRT500L紅外傳感器
本課題在實物制作中采用了5路循跡傳感器模塊,最中間的紅外對管用來檢測黑線,兩邊的紅外之間的距離大于蹺蹺板上黑線的寬度。將紅外的三個輸出口連接到STM32的PAl-PA4端口,將檢測到的高低電平輸入給ARM,從而控制電機的轉速和車輪的轉向,將蹺蹺板上面的黑線對應好最中間的紅外對管,在代碼中通過位置式PID調節使智能小車沿著黑線行走。
2.5 MPU6050角度傳感器
小車在蹺蹺板上要找到平衡位置,則需要一款角度傳感器,在實物制作中選擇了GY-52 MPU6050三軸陀螺儀模塊。把角度傳感器的數值傳進單片機,經過單片機濾波,轉化為角度判斷蹺蹺板的傾斜角度,該模塊具有體積小、精度高、采集速度快和操作代碼簡單等特點。
首先設置好PID的三個系數值,再獲取采樣值后,將其與期望值進行對比,計算出偏差值和控制量,輸出控制量給被控對象,本課題當中的被控對象包括有五個紅外對管的循跡模塊和MPU6050的平衡模塊,從而實現小車沿著黑線直走以及找到蹺蹺板的平衡點。
3調試
本文對于電動車最重要的要求就是穩定性要好,剛開始調試尋跡黑線時,小車在黑線附近擺動的幅度較大,極其不穩定,后來通過PID參數的調節,控制了電機的轉速,才使得小車在檢測的黑線的過程中較為穩定的直線運行。平衡方面的調試也是如此,當小車到平衡點附近,小車來回擺動的幅度和頻率也很快,經過調試,在快到中心點時,進行了減速控制,從而使小車穩定的到達中心點。設起始點為A點,中點為B點,終點為C點。
4總結
通過本次設計我體會到了硬件和軟件之間的密不可分,小車硬件結構的選取也十分重要,比如電機和車輪的選取,最讓我深刻的體會是硬件的穩定性對后期的調試相當重要,首先引腳之間的連接我都是用杜邦線,這種情況很容易松動,對調試的影響很大。還需要反過來繼續處理硬件情況,這極大影響了做本課題的進度。同時,通過這次研究也對STM32的軟件、硬件系統有了初步的理解和掌握,但軟件方面在直流電機的調速和精確控制上還不是很靈活,以后應該加強學習。
