多層矯正式大蒜播種機(jī)矯正機(jī)構(gòu)性能分析
2019-12-22 08:24:56秦婷婷王存鵬呂寶君張倩瑜張清博胡彩旗
農(nóng)機(jī)化研究 2019年5期
秦婷婷,王存鵬,呂寶君,匡 軍,張倩瑜,張清博,胡彩旗
(青島農(nóng)業(yè)大學(xué) a.機(jī)電學(xué)院;b.科技處,山東 青島 266109)
0 引言
我國(guó)是大蒜種植大國(guó),大蒜是我國(guó)在國(guó)際市場(chǎng)上極具競(jìng)爭(zhēng)力的農(nóng)產(chǎn)品,也是我國(guó)重要的經(jīng)濟(jì)作物和出口產(chǎn)品,用途較為廣泛,需求量較大。大蒜的種植主要集中在山東、江蘇、安徽、河南和陜西等地。目前,我國(guó)大蒜種植面積約為75萬hm2,約占世界總種植面積的71%[1-3]。
大蒜種植對(duì)于直立性要求較高,為了保證大蒜播種成活率和大蒜產(chǎn)量,蒜瓣入土后鱗芽朝上是必要條件。但是,由于蒜瓣的不規(guī)則外形導(dǎo)致在大蒜機(jī)械化播種過程中的直立性很難保證。由于上述這種局限性,目前我國(guó)大蒜的種植大多采用手工種植,勞動(dòng)強(qiáng)度大、成本較高、效率較低,故大蒜的精準(zhǔn)定向播種是實(shí)現(xiàn)大蒜機(jī)械化和自動(dòng)化播種的關(guān)鍵,對(duì)于減輕蒜農(nóng)的勞動(dòng)強(qiáng)度、增加其收入具有重要意義[4-7]。
本文通過對(duì)大蒜外形尺寸進(jìn)行多組測(cè)量獲得大蒜蒜瓣的統(tǒng)計(jì)學(xué)外形尺寸,設(shè)計(jì)了大蒜精準(zhǔn)定向播種機(jī)構(gòu),并基于試驗(yàn)設(shè)計(jì)、三維建模軟件和三維仿真軟件等技術(shù)和方法提出可使大蒜鱗芽朝上并保證其播種直立度的多層矯正裝置。試驗(yàn)數(shù)據(jù)分析和仿真分析結(jié)果表明:該裝置是可行的,能夠滿足大蒜播種蒜瓣入土鱗芽朝上的農(nóng)藝要求。
1 播種機(jī)關(guān)鍵結(jié)構(gòu)設(shè)計(jì)
1.1 大蒜種子外形尺寸測(cè)量
從大蒜種子中隨機(jī)挑出100個(gè)進(jìn)行外形長(zhǎng)度、寬度和高度尺寸的測(cè)量,如圖1所示;測(cè)量結(jié)果如表1所示。

(a)
(b)

變量長(zhǎng)L/mm寬B/mm高H/mm質(zhì)量M/g個(gè)數(shù)100100100100平均值33.9518.2521.176.78最大值38.322.724.18.77最小值29.212.416.2 4.8
由測(cè)量數(shù)據(jù)可知:大蒜外形尺寸的最大值分別為L(zhǎng)=38.1mm,B=22.7mm,H=24.1mm,根據(jù)以上數(shù)據(jù)確定取種勺的直徑為45mm,排種管的直徑為50mm。
1.2 排種勺設(shè)計(jì)
在一個(gè)輥?zhàn)由显O(shè)置多排取種勺,由取種勺的尺寸可以保證每個(gè)勺子每次只取一個(gè)蒜瓣,以達(dá)到單粒播種的目的。排種輥和排種勺外形如圖2所示。
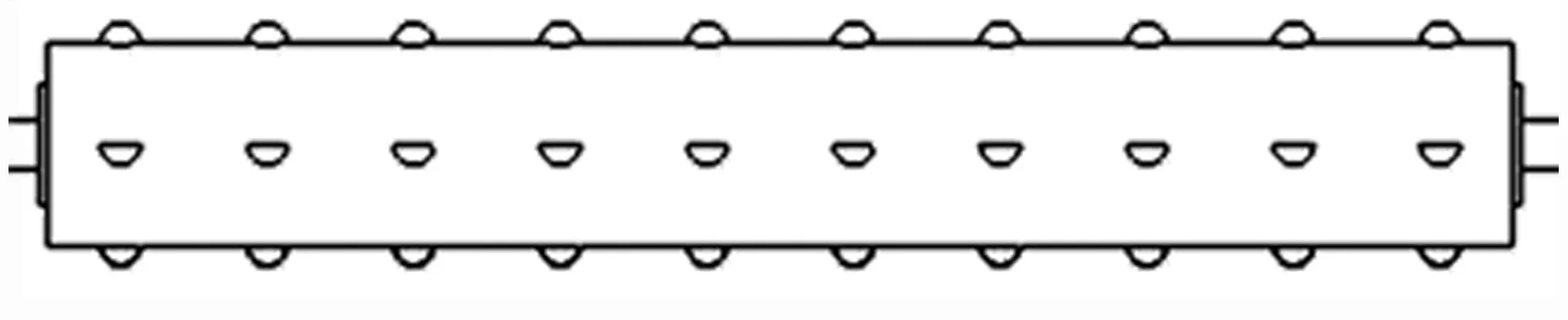
圖2 排種輥和取種勺
1.3 施肥裝置設(shè)計(jì)
對(duì)于一個(gè)機(jī)器來說,在播種機(jī)構(gòu)之前有一個(gè)完善的施肥裝置是很有必要的。施肥裝置主要由肥料箱、排肥軸、外槽輪式排肥器、排肥管和開溝器等組成。施肥裝置的動(dòng)力由地輪通過鏈傳動(dòng)提供。肥料箱安裝在施肥裝置的上方,在每一行的中心位置設(shè)置一個(gè)開溝器,通過調(diào)節(jié)排肥槽輪的工作長(zhǎng)度調(diào)整施肥量的大小;并將一定量的肥料排進(jìn)輸肥管中,通過輸肥管,肥料落入開好的溝中,完成施肥。施肥裝置如圖3所示;排肥槽輪如圖4所示。
為了精量控制排肥量,外槽輪式排肥器的排量q計(jì)算公式為
式中q1—排肥器每轉(zhuǎn)凹槽排肥量(g);
q2—排肥器每轉(zhuǎn)凹槽外帶動(dòng)的排肥量(g);
d—外槽輪直徑(mm);
L—外槽輪工作長(zhǎng)度(mm);
γ—肥料容重(g/L);
n—排肥軸轉(zhuǎn)速(r/min);
α(n)—肥料對(duì)排肥凹槽的充滿系數(shù),一般取0.6~0.75;
f—每個(gè)凹槽的面積(mm2);
t—每個(gè)凹槽的節(jié)距(mm);
cn(n)—凹槽外帶動(dòng)層特性系數(shù),與轉(zhuǎn)速有關(guān)。
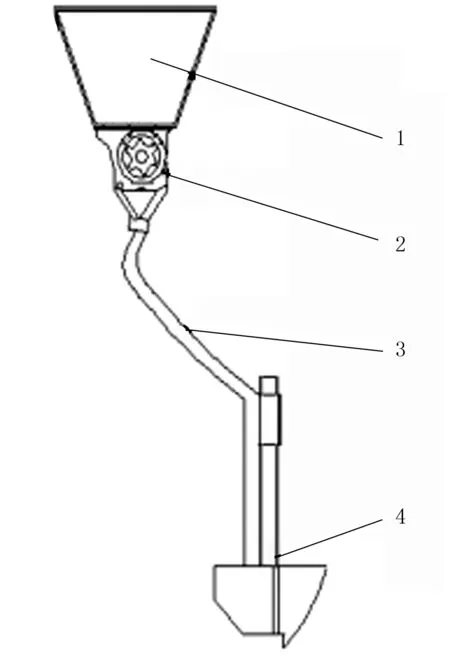
1.肥料箱 2.旋轉(zhuǎn)排肥槽輪 3.輸肥管 4.開溝器
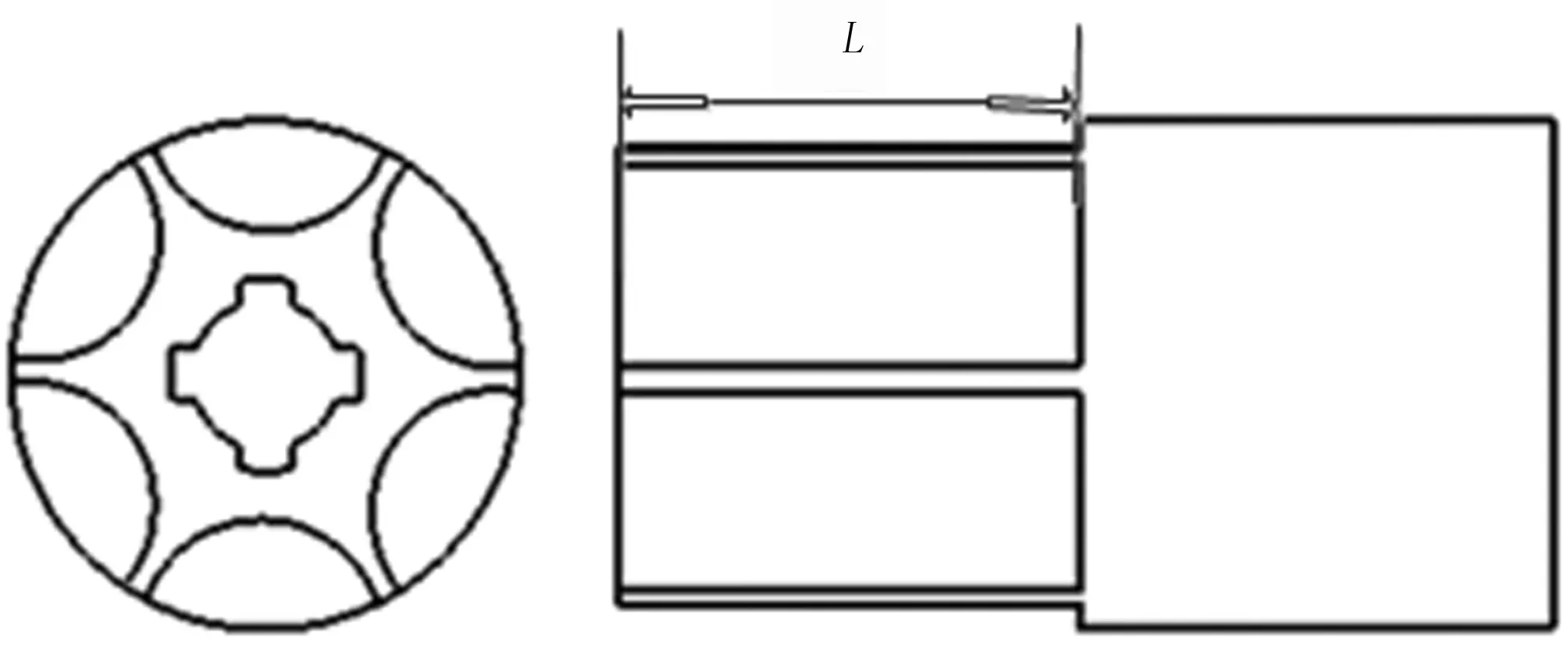
L.槽輪工作長(zhǎng)度
1.4 矯正裝置設(shè)計(jì)
采用鐵皮制作錐形小碗,模擬蒜瓣平躺、鱗芽朝上、鱗芽朝下3種下落狀態(tài),以通過錐形矯正碗矯正后鱗芽朝上為達(dá)到矯正目的,通過多次試驗(yàn)發(fā)現(xiàn):當(dāng)自由下落的蒜瓣掉入到具有一定角度的錐形小碗中時(shí),蒜瓣會(huì)依靠自身重力和重心位置在下落過程中調(diào)整其狀態(tài);通過多次改變錐形矯正小碗的錐度發(fā)現(xiàn),當(dāng)錐度為45°時(shí),鱗芽朝上的蒜瓣最多,矯正率最高。45°錐形矯正碗的結(jié)構(gòu)如圖5所示。錐形矯正碗實(shí)驗(yàn)數(shù)據(jù)如表2所示(表2中每種下落姿態(tài)下樣本容量均為100個(gè))。
整個(gè)矯正裝置由排種管、V型矯正板、雙層錐形矯正碗和鴨嘴組成,蒜瓣從排種管掉落,通過V型矯正板調(diào)整蒜瓣的姿態(tài),通過雙層錐形矯正碗再對(duì)蒜瓣姿態(tài)進(jìn)行兩次矯正,以保證蒜瓣矯正率達(dá)到98%以上,最后通過鴨嘴種植以保證大蒜種植的精準(zhǔn)定向要求。矯正裝置的整體結(jié)構(gòu)如圖6所示。
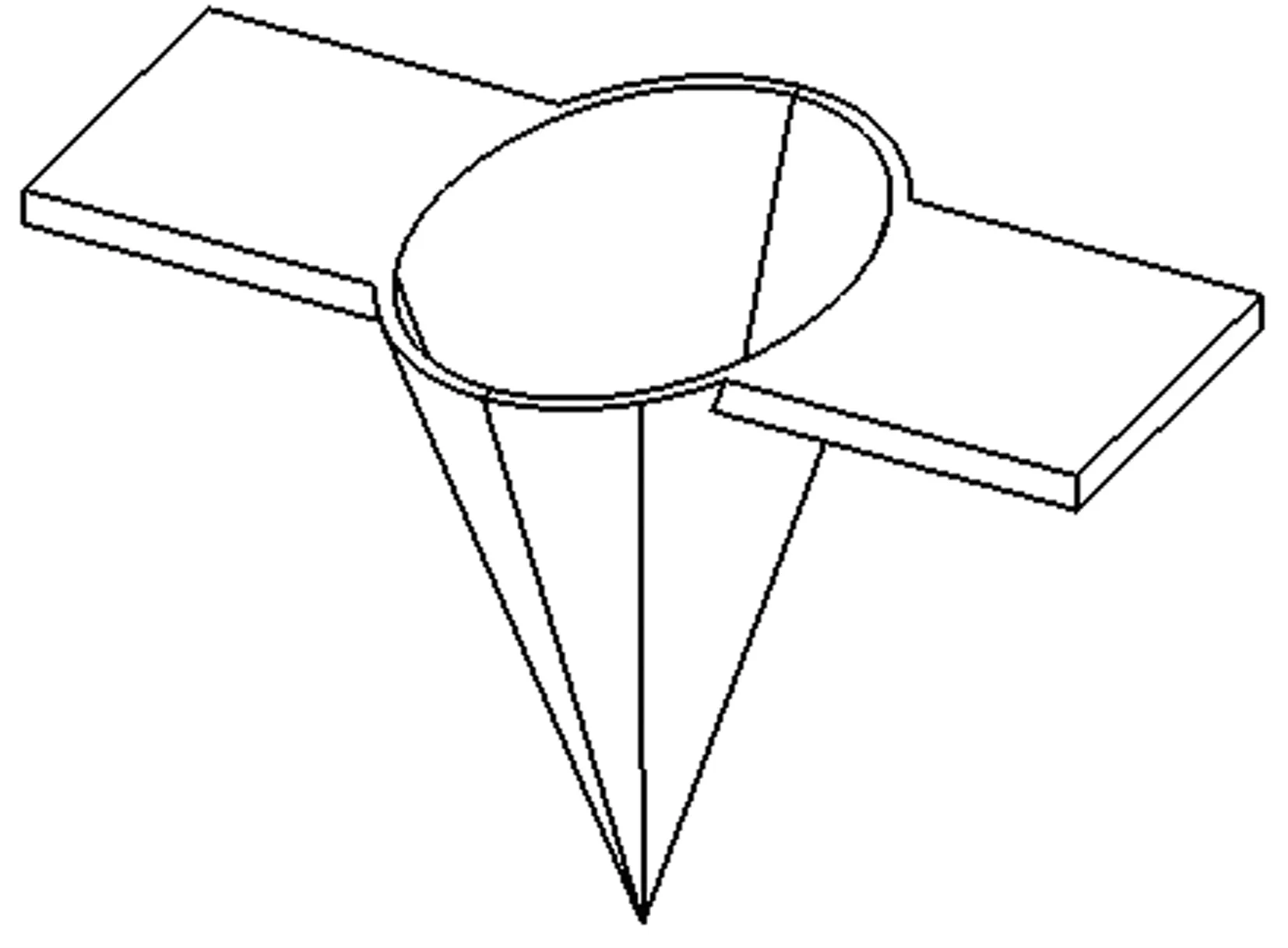
圖5 錐形矯正碗結(jié)構(gòu)圖
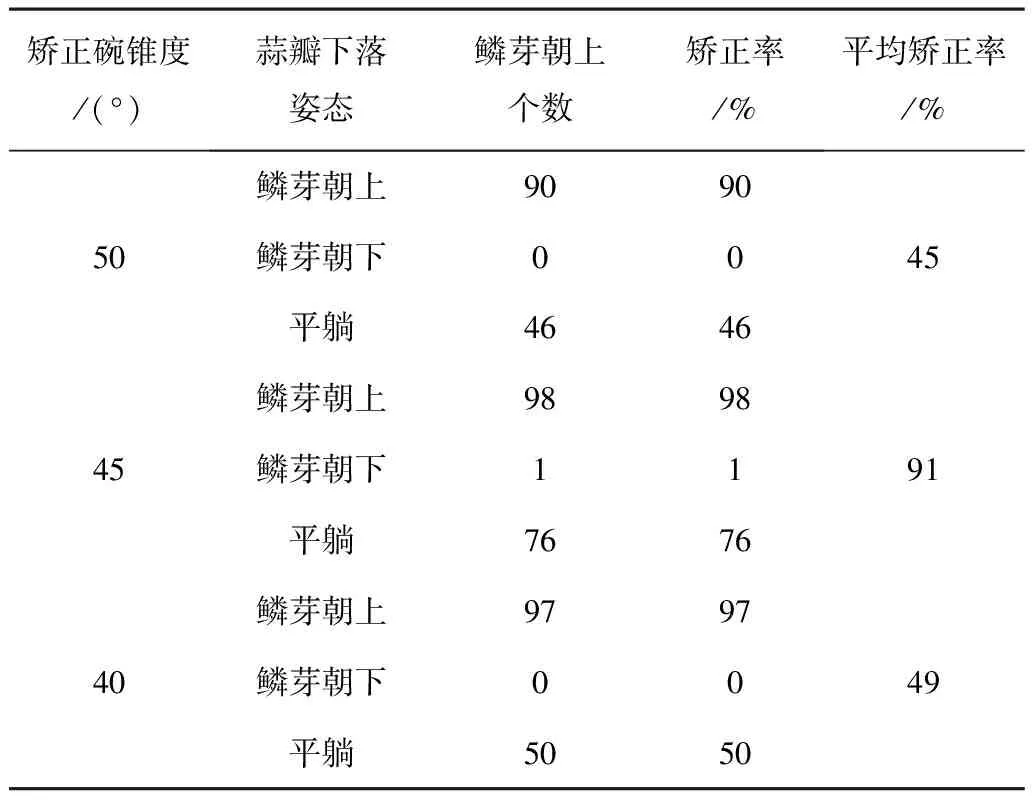
矯正碗錐度/(°)蒜瓣下落姿態(tài)鱗芽朝上個(gè)數(shù)矯正率/%平均矯正率/%50鱗芽朝上9090鱗芽朝下00平躺46464545鱗芽朝上9898鱗芽朝下11平躺76769140鱗芽朝上9797鱗芽朝下00平躺505049
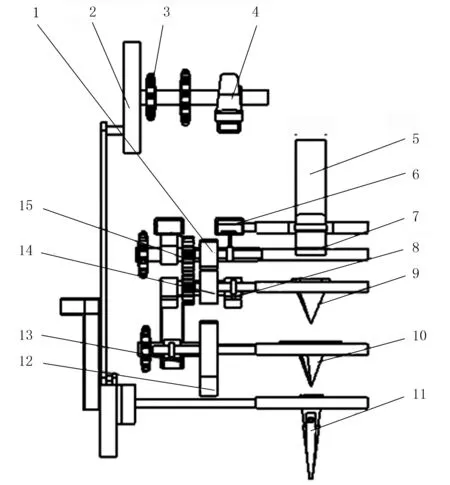
1.凸輪 2.曲柄滑塊機(jī)構(gòu) 3.鏈輪 4.軸承座 5.落料管 6.滑動(dòng)裝置1 7.V形矯正板 8.滑動(dòng)裝置2 9.錐形矯正碗 10.偏心式錐形矯正碗 11.鴨嘴 12.凸輪1 13.滑動(dòng)裝置 14.凸輪2 15.齒輪
由于凸輪傳動(dòng)機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)單、制造容易、工作可靠,從動(dòng)輪運(yùn)動(dòng)時(shí)間和靜止時(shí)間可在較大范圍內(nèi)變化,所以V型矯正板和雙層錐形矯正碗均采用凸輪機(jī)構(gòu)進(jìn)行間歇傳動(dòng)。為了達(dá)到逐層開合矯正的目的,需要對(duì)凸輪的回程長(zhǎng)度、安裝角度進(jìn)行設(shè)計(jì)。矯正裝置的開合距離與大蒜的外形尺寸相關(guān),根據(jù)表1設(shè)置V形矯正器與錐形矯正碗的開合距離不小于25mm,將凸輪的回程展開長(zhǎng)度設(shè)置為30mm,以滿足矯正裝置的開合要求。為實(shí)現(xiàn)V形矯正器和錐形矯正碗的逐層開合,各凸輪需要錯(cuò)開一定角度安裝,驅(qū)動(dòng)V形矯正器的凸輪安裝角度和驅(qū)動(dòng)第一層錐形矯正碗的凸輪安裝角度錯(cuò)開120°,驅(qū)動(dòng)第一層錐形矯正碗的凸輪和驅(qū)動(dòng)第二層錐形矯正碗的凸輪錯(cuò)開90°。
2 播種機(jī)整體結(jié)構(gòu)
2.1 整體結(jié)構(gòu)介紹
該多層矯正式大蒜播種機(jī)由播種箱、排肥箱、排肥器、取種勺、開溝器、導(dǎo)種管、凸輪、鴨嘴、中心軸、牽引桿、地輪、鏈輪、凸輪、覆土器、V形矯正板,以及雙層矯正碗等組成,如圖7所示。
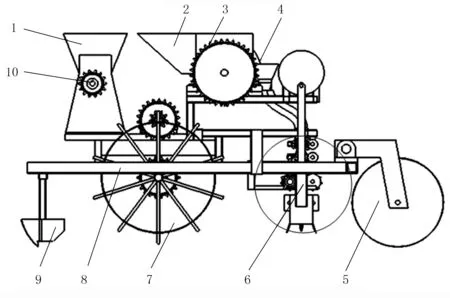
1.肥料箱 2.種子箱 3.鏈輪 4.排種輥 5.覆土器 6.矯正裝置 7.地輪 8.機(jī)架 9.開溝器 10.排肥裝置
播種箱內(nèi)部設(shè)置有取種勺,其下端連接排種管,排種管下口正對(duì)著矯正板,矯正板下面是兩層矯正碗裝置,矯正碗下面是一個(gè)鴨嘴。3層矯正裝置分別安裝在3個(gè)固定支架上,鴨嘴也安裝在一個(gè)固定支架上,鴨嘴支架兩端與滑塊機(jī)構(gòu)相連接。開溝器在最前端,開溝器后方為排肥系統(tǒng),雙圓盤式覆土器在整個(gè)機(jī)構(gòu)的后面。
2.2 播種機(jī)工作原理介紹
該裝置主要由拖拉機(jī)牽引前進(jìn),所有動(dòng)力從地輪輸出。將動(dòng)力通過鏈傳動(dòng)以及齒輪傳動(dòng)逐級(jí)傳遞到各個(gè)機(jī)構(gòu)。
1)肥料箱將肥料經(jīng)排肥機(jī)構(gòu)傳動(dòng)到開溝器所開好的溝底,然后泥土自動(dòng)將肥料覆蓋,完成施肥。
2)種箱及排種輥中,種箱中的大蒜由排種輥上自帶的排種勺將大蒜挖起,經(jīng)擋板進(jìn)行排選,后經(jīng)設(shè)計(jì)好的兩壁軌道進(jìn)入輸種管;蒜瓣掉到V型板上進(jìn)行初步調(diào)正,再經(jīng)下面兩級(jí)錐形矯正碗進(jìn)行進(jìn)一步調(diào)正,完成之后經(jīng)插播機(jī)構(gòu)進(jìn)行大蒜的播種。
3)播種完成之后,由雙圓盤式覆土器進(jìn)行鎮(zhèn)壓覆蓋,覆土器將種子覆蓋。
3 基于ADAMS的矯正裝置仿真分析
ADAMS軟件使用交互式的圖像環(huán)境和零件庫(kù)、約束庫(kù)、力庫(kù),創(chuàng)建完全參數(shù)化的機(jī)械系統(tǒng)模型,可用于對(duì)虛擬樣機(jī)進(jìn)行運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)和靜力學(xué)分析,得出輸出速度、位移、加速度和反作用力曲線。
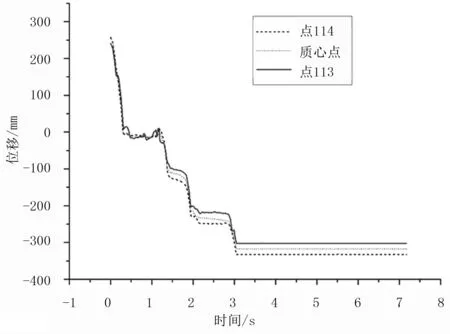
本文中,為了進(jìn)一步分析矯正裝置的性能,采用 ADAMS對(duì)矯正機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)仿真。把在SOLIDWORKDS中建立矯正裝置的三維模型導(dǎo)入到ADAMS中,并對(duì)各零部件添加約束后,對(duì)矯正裝置進(jìn)行運(yùn)動(dòng)仿真,設(shè)置蒜瓣以不同的形態(tài)下落,如平放、鱗芽朝上、鱗芽朝下,以及其他不規(guī)律形態(tài);隨著蒜瓣逐漸由種箱經(jīng)排種勺下落,機(jī)構(gòu)的開合主要由凸輪機(jī)構(gòu)進(jìn)行控制,進(jìn)行仿真,導(dǎo)出蒜瓣質(zhì)心隨時(shí)間變化的運(yùn)動(dòng)軌跡曲線。為便于獲取蒜瓣在下落過程中的姿態(tài)變化,在蒜瓣的兩端各建立一個(gè)標(biāo)記點(diǎn)113(鱗芽部)和114(根部),標(biāo)記點(diǎn)位置如圖8所示。蒜瓣以不同形態(tài)下落時(shí)質(zhì)心點(diǎn)以及所標(biāo)記點(diǎn)隨時(shí)間變化的運(yùn)動(dòng)軌跡曲線如圖9所示。其中,(a)為蒜瓣平放,(b)為蒜瓣鱗芽朝上,(c)為蒜瓣鱗芽朝下。
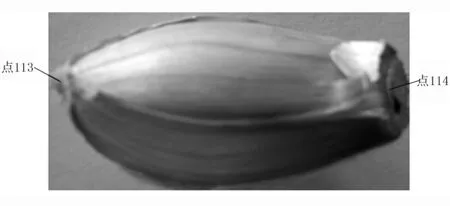
圖8 蒜瓣標(biāo)記點(diǎn)
蒜瓣開始下落時(shí)相對(duì)矯正機(jī)構(gòu)的位置如圖10所示。蒜瓣下落初始位置為距離排種管上端向上8cm,圖9縱坐標(biāo)中的位移0點(diǎn)位置為距離排種管下端向上2.5cm,即矯正機(jī)構(gòu)導(dǎo)入ADAMS后生成的坐標(biāo)原點(diǎn),其坐標(biāo)位置如圖10所示。
(a)
(b)

(c)
由圖9可以看出:蒜瓣在下落過程中發(fā)生多次碰撞,第1次碰撞發(fā)生在V形矯正板上,蒜瓣在掉落到V形矯正板上時(shí)質(zhì)心點(diǎn)曲線與所標(biāo)記兩點(diǎn)的曲線幾乎重合,可以判定此時(shí)蒜瓣的狀態(tài)為平躺;第2次碰撞發(fā)生在錐形矯正碗中,蒜瓣掉落在錐形矯正碗中時(shí)質(zhì)心點(diǎn)曲線處在所標(biāo)記兩點(diǎn)曲線的中間,標(biāo)記在鱗芽端的點(diǎn)的曲線在最上方,但曲線距離較近,由此可以判定此時(shí)蒜瓣的狀態(tài)為鱗芽端傾斜朝上;第3次碰撞發(fā)生在偏心式錐形矯正碗中,蒜瓣在掉落在偏心式錐形矯正碗中時(shí)質(zhì)心點(diǎn)曲線處在所標(biāo)記點(diǎn)曲線的中間,標(biāo)記在鱗芽端部的點(diǎn)的曲線在最上方,可以判定此時(shí)蒜瓣的狀態(tài)為鱗芽端朝上。即多層矯正裝置將蒜瓣調(diào)整為鱗芽朝上的狀態(tài)。
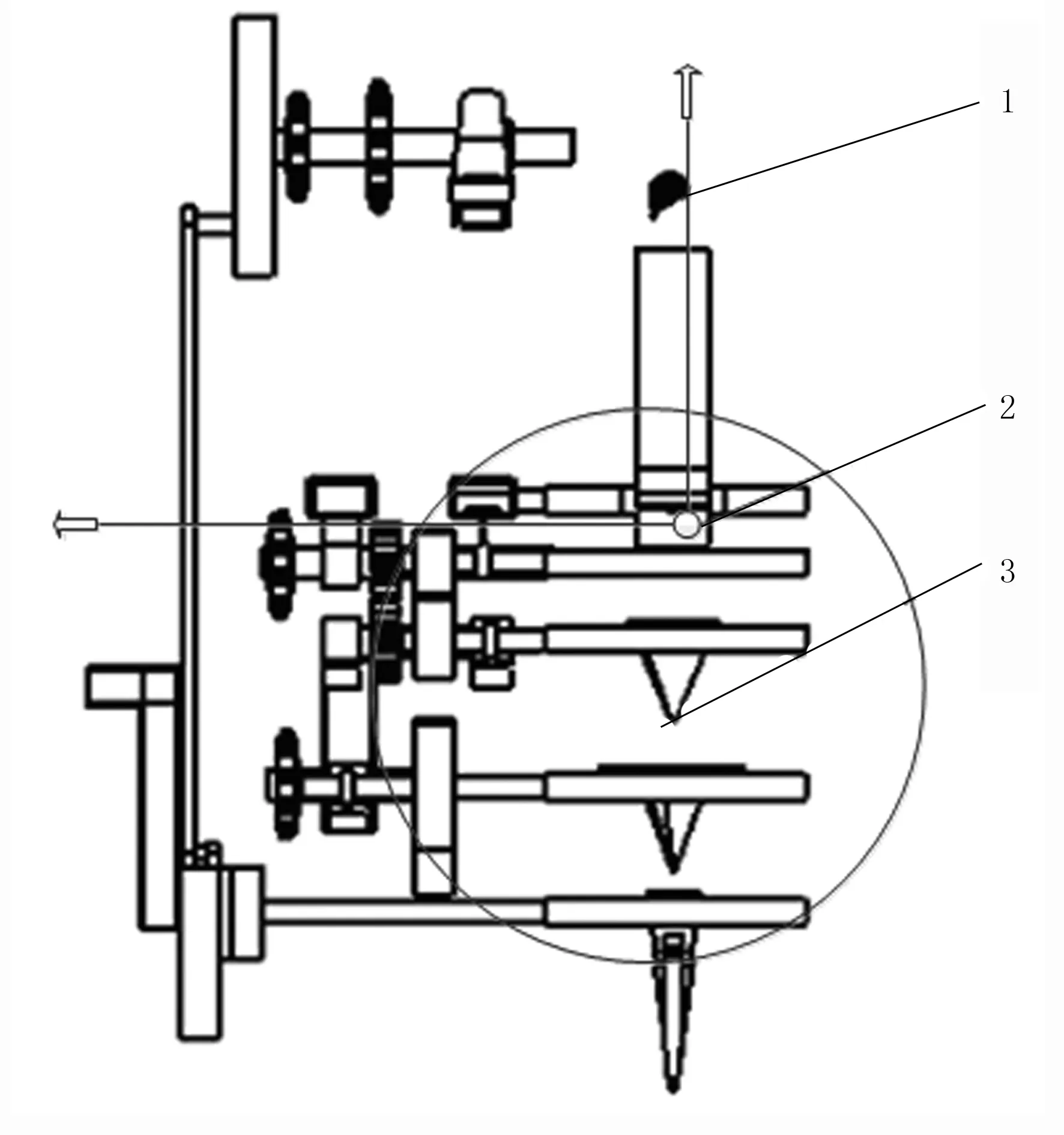
1.大蒜 2.坐標(biāo)原點(diǎn) 3.矯正機(jī)構(gòu)
4 結(jié)論
在大蒜播種過程中,為了保證播種質(zhì)量和大蒜產(chǎn)量,要求蒜瓣入土后鱗芽朝上。本文針對(duì)這個(gè)問題提出了多層矯正式大蒜播種機(jī)結(jié)構(gòu),以蒜瓣鱗芽朝上、鱗芽朝下、平躺3種典型下落姿態(tài)為主,分別以100個(gè)蒜瓣的樣本容量,試驗(yàn)統(tǒng)計(jì)和分析了3個(gè)錐度的錐形矯正碗對(duì)各姿態(tài)蒜瓣的矯正規(guī)律,并運(yùn)用SolidWorks軟件對(duì)該機(jī)構(gòu)進(jìn)行建模,基于ADAMS軟件對(duì)主要矯正部件進(jìn)行運(yùn)動(dòng)仿真獲得大蒜播種過程中的蒜瓣運(yùn)動(dòng)軌跡曲線。通過對(duì)質(zhì)心點(diǎn)和兩端標(biāo)記點(diǎn)運(yùn)動(dòng)軌跡的對(duì)比分析表明:蒜瓣在通過多層矯正裝置的過程中由于矯正裝置對(duì)其多次矯正,保證了蒜瓣鱗芽朝上的要求。
